сл
ел
о
4 4
ОО
to
Изобретение относится к машиностроению, а именно к прямолинейно направляющим механизмам для перемещения вдоль координатных осей, и может быть использовано, в частности, в автоматических устройствах.
Цель изобретения - упрощение конструкции механизма,
На чертеже показана кинематическая схема механизма.
Механизм содержит основание 1 с прямолинейной направляющей 2, установленный в нем ползун 3 и четыре стержня 4 равной длины, образующие шарнирно-рычаж- ный ромб KEFQ. Одним из щарниров, например щарниром К, ромб связан с ползуном 3. На основании 1 установлены два одинаковых двуплечих соосных кривощипа 5 и б с плечами равной длины. Концы кри- вощипов 5 и 6 с помощью четырех шатунов 7 равной длины шарнирно связаны с шарнирами Е и G ромба KEFG, расположенными на диагонали ромба, перпендикулярной той диагонали, на которой расположен шарнир, связывающий ромб с ползуном 3.
Шарнирно-рычажный механизм для прямолинейных двухкоординатных перемещений, содержащий основание с прямолинейной направляющей, ползун, установленный в направляющей с возможностью возвратно-поступательного движения, и шариирио- рычажный ромб, одним шарниром связанный с ползуном, а двумя шарнирами, расположенными на другой диагонали, - с основанием, отличающийся тем, что, с целью упрощения конструкции, связь ромба с основанием выполнена в виде двух идентичных двуплечих соосных кривошипов с плечами равной длины и четырех шатуМеханизм работает следующим образом.25 нов равной длины, одними концами попарПри вращении от привода (не пока-но связанных с соответствующими шарнизан) одного из кривошипов 5 или 6 шату-рами ромба, а другими концами шарны 7 сообщают шарнирам Е и G раз-нирно связанных с соответствующими коннонаправленное возвратно-поступательноецами кривошипов.
движение вдоль оси X. Шарниры К и F совершают такое же, но противоположное по фазе, движение вдоль оси У.
Если в качестве ведущего звена исполь- зовать ползун 3, то при аналогичном возвратно-поступательном перемещении всех щарниров ромба KEFG механизм будет преобразовывать возвратно-поступательное движение ползуна 3 во вращательное движение кривошипов 5 и 6.
Формула изобретения
Шарнирно-рычажный механизм для прямолинейных двухкоординатных перемещений, содержащий основание с прямолинейной направляющей, ползун, установленный в направляющей с возможностью возвратно-поступательного движения, и шариирио- рычажный ромб, одним шарниром связанный с ползуном, а двумя шарнирами, расположенными на другой диагонали, - с основанием, отличающийся тем, что, с целью упрощения конструкции, связь ромба с основанием выполнена в виде двух идентичных двуплечих соосных кривошипов с плечами равной длины и четырех шатунов равной длины, одними концами попар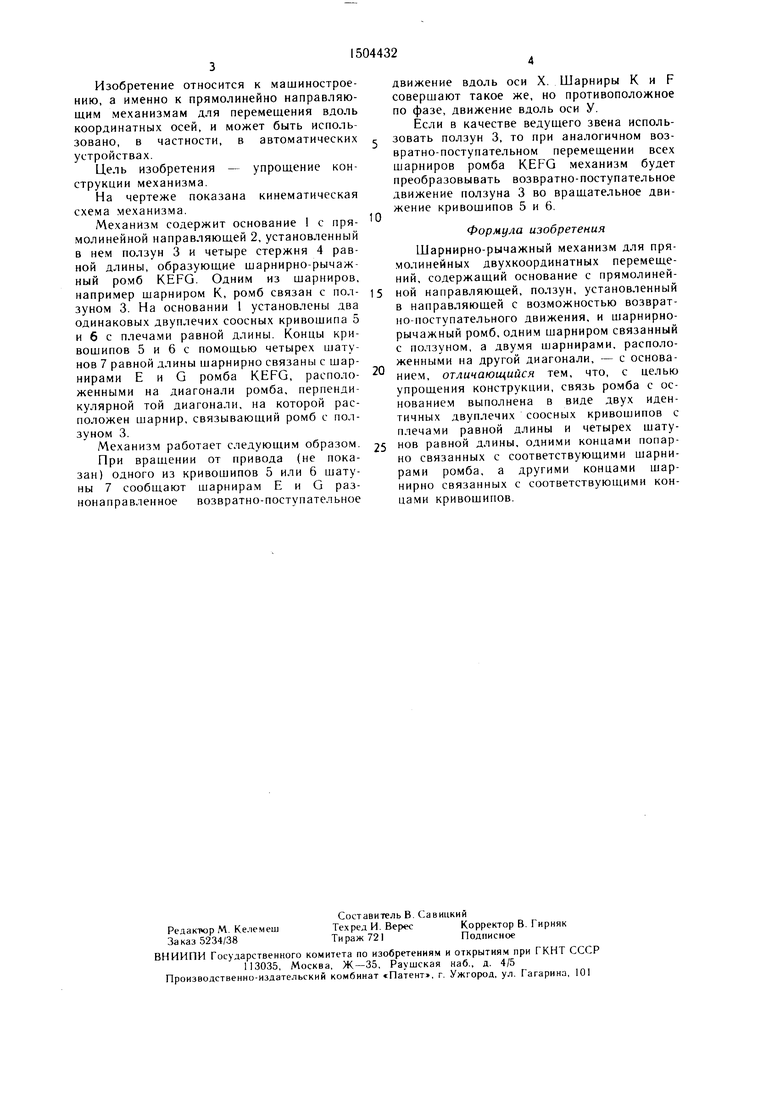
Изобретение относится к прямолинейно направляющим механизмам для перемещения вдоль координатных осей и может найти применение , в частности, в автоматических устройствах. Цель изобретения - упрощение конструкции механизма. При вращении кривошипа 5 или 6 шатуны 7 сообщают шарнирам E и G разнонаправленное возвратно-поступательное движение вдоль оси X, а шарниры K и F совершают такое же, но противофазное движение вдоль оси Y. Ведущим звеном может служить и ползун 3. 1 ил.
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1979, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Телефонная трансляция | 1922 |
|
SU465A1 |
| Вращающаяся топка | 1923 |
|
SU1456A1 |
