Изобретение относится к машиностроению, а именно к кривошипным преобразователям вращательного движения в возвратно-поступательное или колебательное, может найти применение, в частности, в приводах валковых и клещевых механизмов подачи с регулируемой амплитудой колебаний.
Цель изобретения -ч повьшение надеж ности механизма за счет снижения усилия на подшипники обоймы при фиксации ползуна и введения противовеса, и по- вьвпение его точности за счет исключения зазоров между ползуном и планшайбой при фиксации ползуна,
I
На чертеже показана конструктивная схема механизма.
Механизм содержит корпус 1, уста- новленный в нем ведущий вал 2, связанную с валом 2 с помощью шлицевого соединения 3 планшайбу 4 и охватывающую вал 2 и планшайбу 4 обойму 5, установленную с возможностью вращения как от носительно корпуса 1, так и относително вала 2 с планшайбой 4. В обойме 5 вьшолнена радиальная прямолинейная направляющая 6, в которой установлены ползун 7 с кривошипным пальцем 8 и противовес 9. На торце планшайбы 4 нарезан спиральный паз 10, в котором взаимодействуют ответные зубцы ползуна 7 и противовеса 9.
Привод 11 вращательного движения вала 2 через зубчатое колесо 12 связан с ведущим центральным зубчатым колесом 13 планетарной передачи, которое связано с сателлитами 14, установленными на водила 15,, и паразитны- ми зубчатыми колесами 16, установленными на корпусе 1. Сателлиты 14 взаимодействуют о центральным колесом 17, жестко закрепленным на валу 2, а колеса 16 - с центральным колесом 18, жестко закрепленным на обойме 5. На водиле 15 выполнен червячный венец 19 взаимодействующий с червяком 20, через электромагнитную муфту 21 связанный с двигателем М.
В обойме 5 вьшолнена полость 22 пневмо- или гидроцилиндра, в котором планшайба 4 является поршнем. Вал 2 имеет сообщающийся с этой полостью осевой канап 23, в котором с противоположного конца с возможностью вращения установлен входной штуцер 24, связанный с пневматической или гидравлической сетью. Для уплотнения полости
5 о з
0
5
и осевого канала установлены манжеты 25 - 27.
Механизм работает следугацим образом.
Включают давле ние в пневмосети, в результате чего iланшайба 4 смещается по шлицевому соединению 3 и прижимает ползун 7 и проттшовес 9 к стенкам направляющей 6, фиксируя положение ползуна 7 и противовеса 9. Затем включают привод 11, который через зубчатое колесо 12, центральное зубчатое колесо 13, сателлиты 14, паразитные колеса 16 и соответственно через центральные колеса 17 и 18 сообщают валу 2, планшайбе 4 и обойме 5 синхронное вращение относительно корпуса 1„ Вместе с обоймой 5 в ее направляющей 6 вращается и закрепленный на ползу- не 7 кривошипный палец 8, имеющий эксцентриситет е.
Для изменения эксцентриситета е, не останавливая механизма, отключают давление в пневмосети и тем самым освобождают ползун 7 и противовес 9. Включают муфту 21, и двигатель М через червяк 20 сообщает вращение води- лу 15. Последнее через сателлиты 14 и центральное зубчатое колесо 17 поворачивает вал 2 и связанную с ним планшайбу 4 относительно обоймы 5. При этом спиральный паз 10 планшайбы 4, взаимодействуя с зубьями ползуна 7 и противовеса 9, перемещает их в радиальной направляющей 6 обоймы 5 во взаимно противоположные стороны. Направление перемещения ползуна 7 и противовеса 9 определяется направлением вращения червяка 20,
После достижения нужного эксцентриситета е отключают двигатель М и муфту 21 и подают давление в полость 22. Обойма 4 поджимает ползун 7 и противовес 9 к стенкам направляющей 6 и фиксирует их в новом положении. Масса и расположение противовеса 9 рассчитаны таким образом, чтобы всегда уравновешивали массу ползуна 7 вместе с пальцем 8.
Формула изобретения
1. Кривошипныймеханизм с регулируемым эксцентриситетом, содержащий корпус, установленный в нем ведущий вал, связанную с валом планшайбу с вьшол- ненным на ее торце спиральным пазом, охватывающую вал и планшайбу и установленную с возможностью вращения
обойму с радиальной прямолинейной направляющей, ус-дановленной в направля- нщей ползун с Торцовыми зубьями, пред- назначеиными для взаимодействия со спиральным пазом планшайбы, закрепленной на ползуне кривошипный палец, планетарную передачу, один из выходных элементов которой связан с обоймой, а другой - с ведущим валом, привод ю вращательного движения ведущего вала, устройство регулирования эксцентриситета и устройство фиксации ползуна, отличающийся тем, что, с целью повьнпения надежности, устрой- is ство фиксации ползуна в виде пневмо- или гидроцилиндра, полость которого выполнена в обойме, а поршень образован планшайбой, которая установлена в полости обоймы с возможностью осе- 20
вого перемещения и связана с ведущим валом при помощи шлицевого соединения в ведущем валу вьтолнен сообщенный с полостью обойкы осевой канал для рабочего тела, а механизм снабжен входным штуцером, установленШ М в осевом канале с возможностью вращения, и противовесом, выполненным в виде второго ползуна с торцовыми зубьями, предназначенными для взаимодействия со спиральным пазом планшайбы, и установленным в радиальной прямолинейной направлянщей обоймы диаметрально противоположно первому палзуну.
2. Механизм по п.1, о т л и ч а ю- щ и и с я тем, :Что, с целью повьш1ения точности, профиль спирального паза планшайбы и зубьев ползунов выполнен трапецеидальным.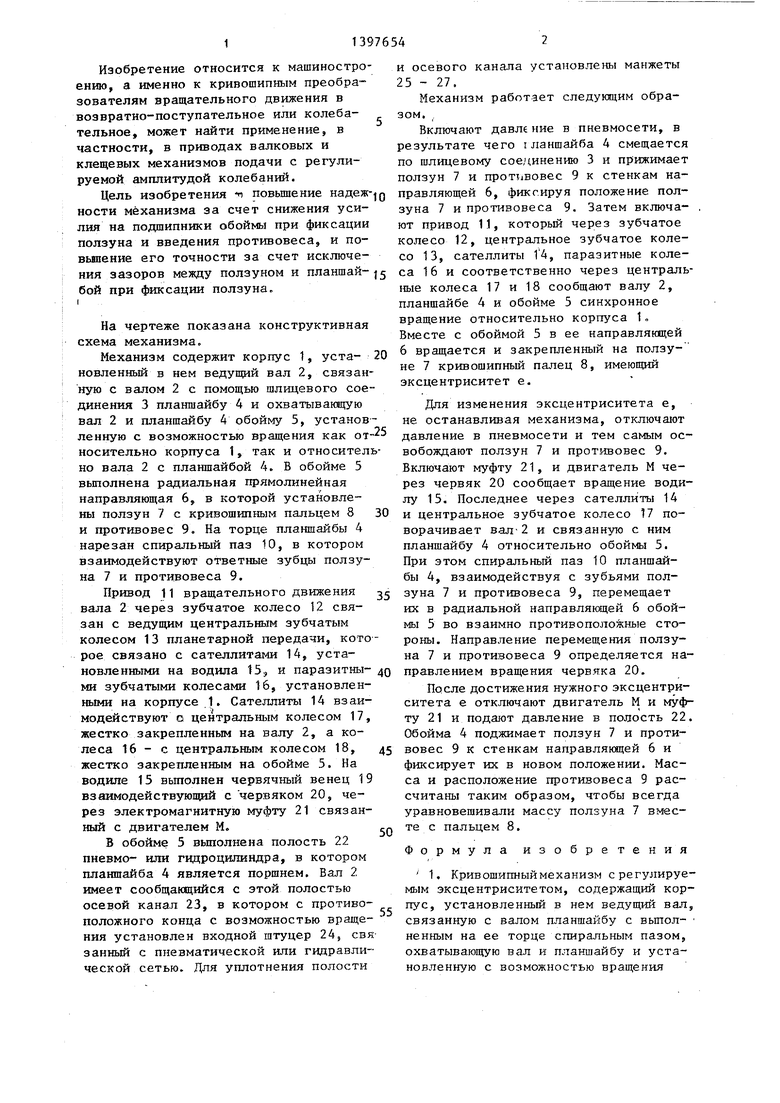
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки поверхностей со спиральным профилем | 1977 |
|
SU618265A1 |
| Устройство для подачи длинномерного материала в рабочую зону обрабатывающей машины | 1989 |
|
SU1634354A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ И НАОБОРОТ | 2005 |
|
RU2310115C2 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Импульсный планетарный вариатор | 1980 |
|
SU932024A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1997 |
|
RU2105214C1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
Изобретение относится к кривошипным преобразователям вращательного движения в возвратно-поступательное или колебательное с регулируемой амплитудой. Цель изобретения - повышение надежности, долговечности и точности механизма. От вращательного привода 11 через зубчатые колеса 12, 13, 14, 16, 17 и 18 вал 2, планшайба 4 и обойма 5 получают синхронное вращение относительно корпуса 1. Вместе с обоймой 5 вращаются ползуй 7 с зaFpeплeнным на нем кривошипным пальцем 8 и противовес 9. Положение ползуна 7 и противовеса 9 зафиксировано планшайбой 4, которая поджата к ним давлением, поступающим в полость 22 через штуцер 24 и осевой канал 23. Для регулировки эксцентриситета е без остановки механизма отключают давление в полости 22 и вращают червяк 20 двигателем М, для чего включают электромагнитную муфту 21. Червяк 20 через водило 15, сателлиты 14 и центральное зубчатое колесо 17 вращает вал 2 и планшайбу 4 относительно обоймы 5. При этом спираль ный паз 10 планшайбы 4, взаимодействуя с зубьями ползуна 7 и противовеса 9, разводит их по направляющей 6 обоймы 5 в противоположные стороны. После достижения нужного эксцентриситета е отключают двигатель М и подают давление в полость 22. Планшайба 4 поджимается к ползуну 7 и противовесу 9 и фиксирует их в новом положении. 1 з.п. ф-лы, 1 ил. S (Л оо со 05 ел 4
| Кривошипный механизм с регулируемым эксцентриситетом | 1977 |
|
SU648770A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
