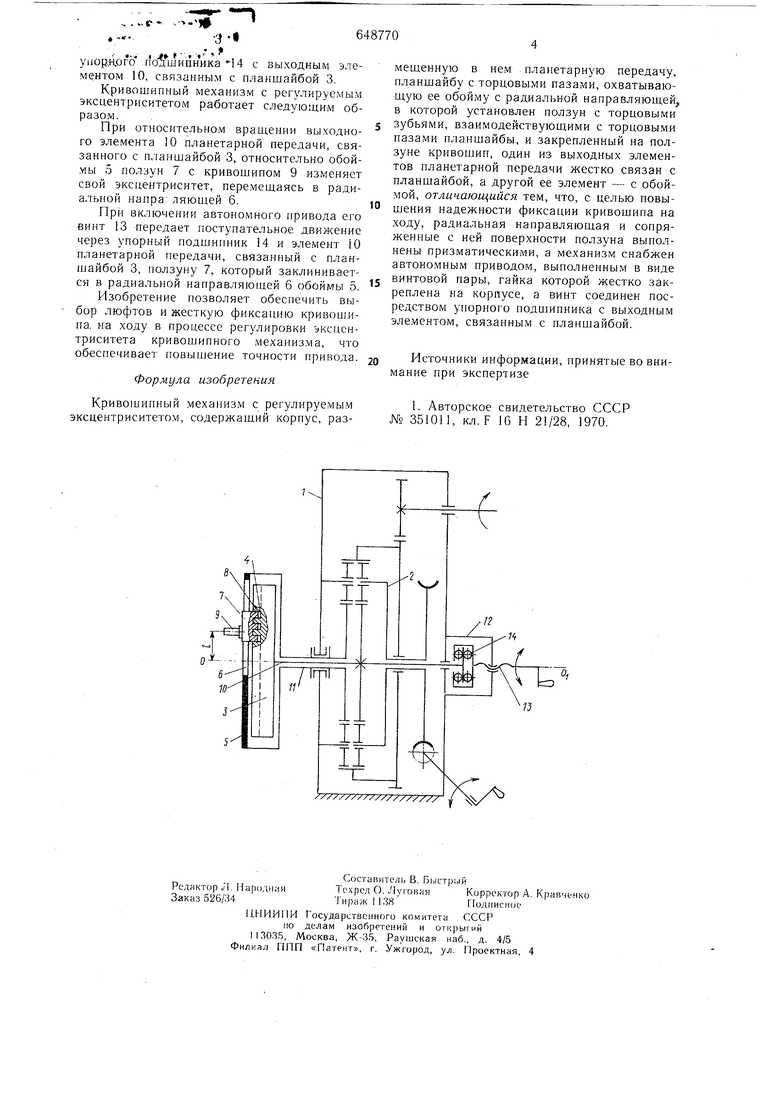
Изобретение относится к машиностроению и может быть использоваью для преобразования вращательного движения в возвратно-ностуиательное или в колебательное, в частности, в вибраторах и пульсаторах с регулируемой а.мплитудой колебаний. Наиболее близким к изобретению является кривоюипный механизм с регулируемым эксцентриситетом, содержащий корпус, размещенную в нем планетарную передачу, планщайбу с торцовыми пазами, охватывающую ее обойму с радиальной направляющей, в которой установлен ползун с торцовыми зубьями, взаимодействуюпаими с торцовыми пазами планщайбы, и закрепленный на ползуне кривощип, один из выходных элементов планетарной передачи жестко связан с планшайбой, а другой ее элемент - с обоймой 1 . Недостатком этого механизма является относительно низкая надежность фиксации кривошипа на ходу вследствие наличия люфтов в передаче. Целью изобретения является повыщение надежности фиксации кривопшпа на ходу. Для этого радиальная направляюн1ая и сопряженные с ней поверхности ползуна выполнены призматическими, а механизм снабжен автономным приводом, выполненным в виде винтовой пары, гайка которой жестко закреплена на корпусе, а винт соединен посредством упорного подшипника с выходным элементом, связанным с планшайбой. На чертеже изображена кинематическая схема кривошипного механизма. КривопЕипный механизм с регулируемым эксцентриситетом содержит корпус 1, размещенную в нем планетарную передачу 2, планн1айбу 3 с торцовыми пазами 4 crniральной фор.мы, охватываюн1ую ее обойму 5 с радиальной направляюнхей б, в которой установлен ползун 7 с торцовыми зубьями 8, взаимодействующими с торцовыми пазами планшайбы, и закрепленный на ползуне кривошип 9. Один из выходных элементов 10 планетарной передачи, нанример централь Ц)1Й вал, жестко связан с нланн1айбой 3, выполнен подвижным вдоль своей оси О-0, а другой ее элемент 11 связан с обоймой 5. Механизм снабжен автономным приводом, выполненным в виде винтовой пары, гайка 12 которой жестко закреплена на корпусе , а винт 13 соединен посредством .....с- «.v 1 J f « v yuop..aoro подшипника -И с выходным элементом 10, связанным с планшайбой 3, Кривошипный механизм с регулируемым эксцентриситетом работает следующим образом. При относительном враш,ении выходного элемента 10 планетарной передачи, связанного с планшайбой 3, относительно обоймы 5 ползун 7 с кривошипом 9 изменяет свой эксцентриситет, перемещаясь в радиальной напра: ляющей 6. При включении автономного привода его БИНТ 13 передает поступательное движение через упорный подшипник 14 и элемент 10 планетарной передачи, связанный с планшайбой 3, ползуну 7, который заклинивается в радиальной направляюп.1ей 6 обоймы 5. Изобретение позволяет обеспечить выбор люфтов и жесткую фиксацию кривошипа, на ходу в процессе регулировки эксцентриситета кривошипного .1еханиз.ма, что обеспечивает повышение точности привода. Формула изобретения Кривошипный механизм с регулируемым эксцентриситетом, содержаший корпус, раз644 мещенную в не.м . планетарную передачу, планшайбу с торцовыми пазами, охватывающую ее обойму с радиальной направляющей, в которой установлен ползун с торцовыми зубьями, взаимодействующими с торцовыми пазами планшайбы, и закрепленный на ползуне кривошип, один из выходных элементов планетарной передачи жестко связан с планшайбой, а другой ее элемент - с обоймой, отличающийся тем, что, с целью повышения надежности фиксации кривошипа на ходу, радиальная направляющая и сопряженные с ней поверхности ползуна выполнены призматическими, а механизм снабжен автономным приводом, выполненным в виде винтовой пары, гайка которой жестко закреплена на корпусе, а винт соединен посредством упорного подшипника с выходным эле.ментом, связанным с планшайбой. Источники информации, цринятые во внимание при экспертизе 1. Авторское свидетельство СССР № 351011, кл. F 16 Н 21/28, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипный механизм с регулируемым эксцентриситетом | 1986 |
|
SU1397654A1 |
| Устройство для моделирования траекторий точек режущего инструмента | 1974 |
|
SU553129A1 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| Станок для фасонной резки труб | 1974 |
|
SU513794A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 1996 |
|
RU2124661C1 |
| Планетарная головка | 1979 |
|
SU770679A1 |
| Станок для маркировки изделий типа стержней | 1972 |
|
SU568477A1 |
| Самоцентрирующее устройство | 1976 |
|
SU686829A1 |
X/////////////
