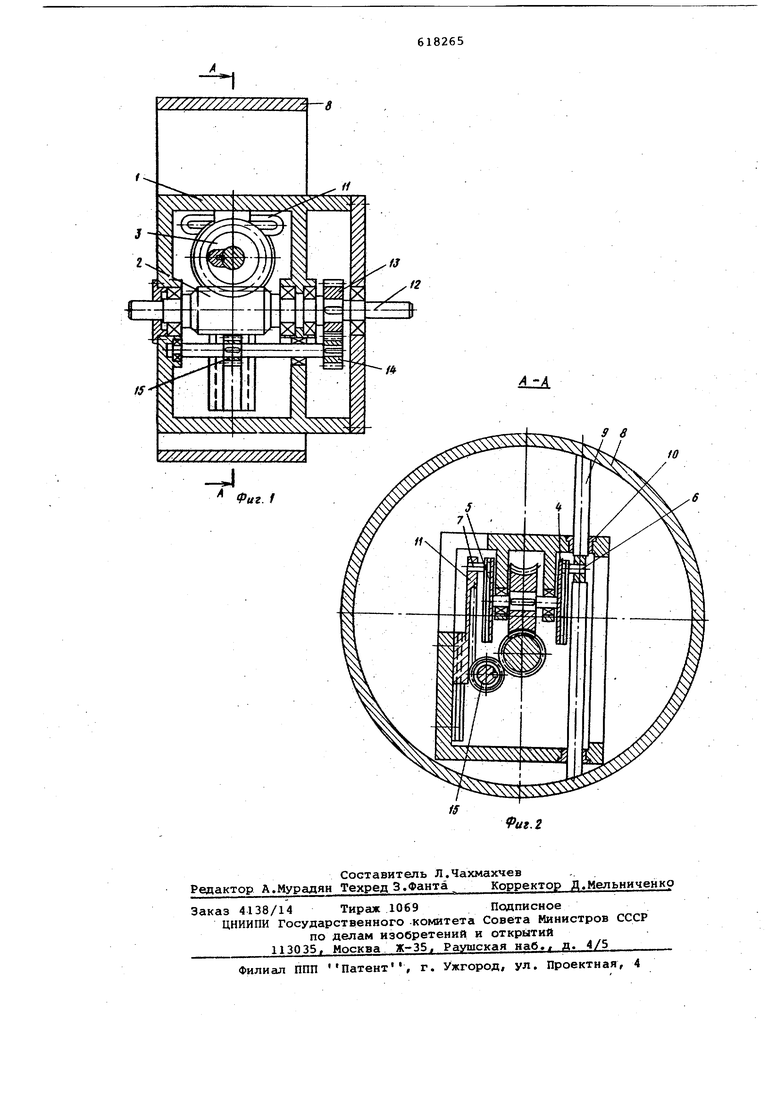
направляющих втулок 10 расположены в плоскости, перпендикулярной продольной оси червяка 2. в теле стойки 9 выполнен поперечный паз, в кото1 ый помещен кривошипный палец 6, что образует синусный механизм. Кри.вошипный палец 7 сопряжен с поверхностями поперечного паза ползуна-рей ки 11, которая помещена в направляющие корпуса 1 и образует синусный ме ханизм. Соосно валу червяка 2 установлен в корпусе 1 на подшипниках вал 12 с шестерней 13, а на наружном торце вала 12 имеется центровое отверстие. Шестерня 13 находится в постоянном зацеплении с зубчатым колесом-сателлитом 14, смонтированным в корпусе 1, Вал зубчатого колеса-сателлита 14 кинематически соединен с ползуном-рейкой посредством реечной шестерни 15. Устройство работает следующим образом. Устройство устанавливают в центре станка центровыми отверстиями, выпол ненными в наружных торцах вала червяка 2 и всша 12. Валу червяка 2 сообщают непрерывное вращательное движение, а вал 12 закрепляют неподвижн относительно стойки. Вращение от червяка 2 сообщается червячному колесу 3, диск 4 и 5 с кривошипными пальцами 6 и 7. Кривошипные пальцы 6 и 7, взаимодействуя с поверхностями поперечных пазов сто ки 9 и ползуна-рейки 11, сообщают им возвратно-поступательные движения, представляющие собой функцию синуса угла поворота червячного колеса 3 от носительно собственной оси вращения. Совместно со стойкой 9 совершает радиальные перемещения планшайба 8. Ползун-рейка 11 приводит в колебательное круговое движение шестерни 15 и вал зубчатого колеса-сателлита 14, которое обкатывает неподвижную шестерню 13 и обеспечивает кр говое колебательное движение корпуса 1 относительно оси шестерни 13. В результате наложения на радиаль ное гармоническое движение планшайбы 8 относительно корпуса 1 переносного гармонического движения корпуса 1 получается сложное движение плаашаАбт с заготовкой, при котором любая точка планшайбы либо заготовки описывает спиральную кривую. Причем необходимые параметры спирали достигаются путем регулировки величин экс центриситетов кривошипных пальцев 6 и 7. В частном случае, когда оси кри вошипных пальцев 6 и 7, находятся в одной плоскости, не имея углового смещения, упомянутая спираль явля ется Архимедовой. Это видно из следующих математических расчетов. Если текущий радиус f , измеряемый от ос червяка 2, произвольной .точки планшайбы 8, взятой на расстоянии Р от геометрической оси планшайбы, совпадающей в начальный момент с осью червяка 2 и вала 12, выразитьг РРо- ReSbM а угол поворота 6 корпуса 1 с планшайбой 8, отсчитываемый от среднего положения кривошипных пальцев 6 и 7, ТО получим функцию траектории зтой точки в полярной системе координат (р 9J в виде спирапи Архимеда а .о . е 1 «7 величины эксцентриситетов кривошипных пальцев 6 и 7; радиус начальной окружности шестерни- 15; i,j,l,- число зубьев шестерни 13 и колеса-сателлита 14. Так как любая точка заготовки в процессе обработки описывает спираль Архимеда, то при воздействии на заготовку инструментом с неподвижным центром масс получается вьаиеупомянутый профиль спирали Архимеда. Формула изобретения Устройство для обработки поверхностей со спиральным профилем, включающее подвижные один относительно другого стойку и корпус с червячным приводом, с валом червячного колеса которого СООСНО установлена шестерня, кинематически связанная с зубчатой рейкой, отлича-ющееся тем. то, с целью расширения технологических возможностей устройства, оно снабжено закрепленной неподвижно на стойке планшайбой и смонтированными на обоих концах вала червячного ко- леса дисками с регулируекыми в радиальном направлении кривошипными пальцами, установленными с возможностью взаимодействия соответственно со стойкой и зубчатой.рейкой, кинематическая связь которой с шестерней, закрепленной неподвижно относительно своей оси, выполнена в виде зубчатой передачи с находящимся в зацеплении с шестерней зубчатым коЛесом-сателлитом, сообщающим корпусу изменение углового положения относительно оси шестерни. . Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР 136647, кл. В 24 В 5/26, 1960.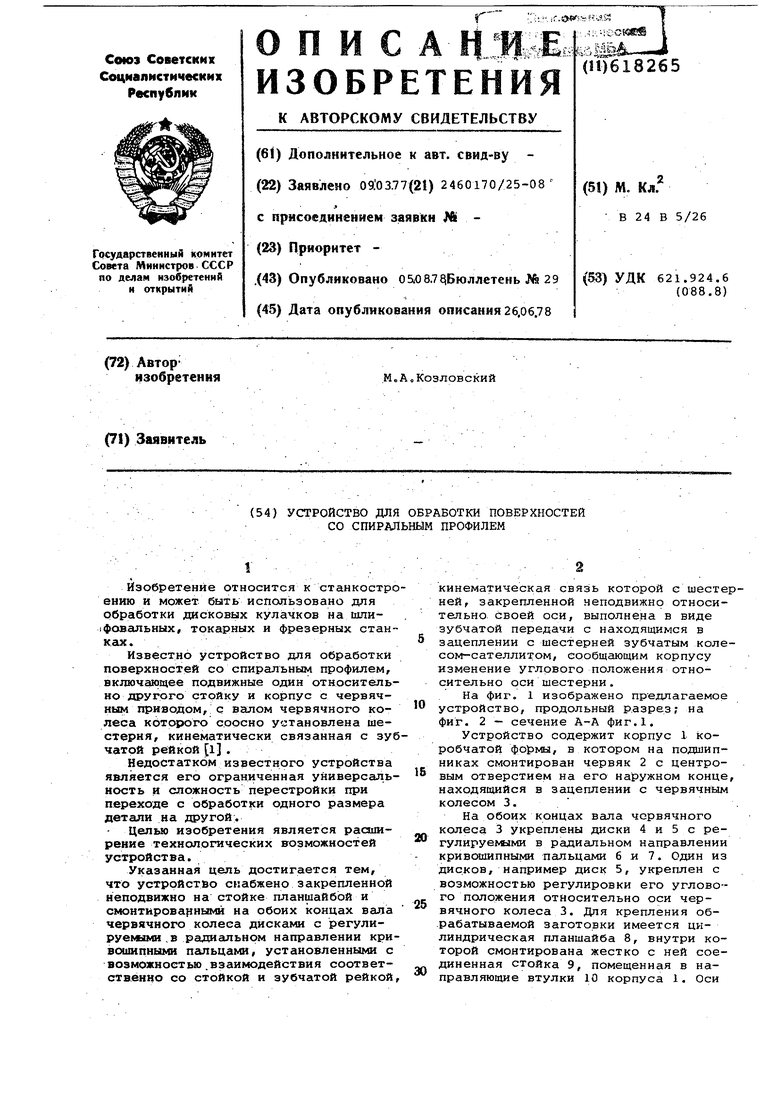
| название | год | авторы | номер документа |
|---|---|---|---|
| Пресс-полуавтомат | 1977 |
|
SU659406A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ОБРАБОТКИ КУЛАЧКОВ | 1973 |
|
SU387793A1 |
| ПЕРЕНОСНОЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 1998 |
|
RU2144449C1 |
| Привод стана холодной прокатки труб | 1983 |
|
SU1152674A1 |
| Кривошипный механизм с регулируемым эксцентриситетом | 1986 |
|
SU1397654A1 |
| Устройство для автоматическойСВАРКи шВОВ пО лиНии пЕРЕСЕчЕНиядВуХ цилиНдРичЕСКиХ пОВЕРХНОСТЕй | 1978 |
|
SU806329A1 |
| Переносной станок для обработки фланцев | 1982 |
|
SU1076196A1 |
| Станок для нарезания конических зубчатых колес с эвольвентными продольными очертаниями зубцов посредством шестернеподобного инструмента методом обкатки | 1948 |
|
SU82667A1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Зажимное устройство | 1981 |
|
SU1009630A1 |