СО СО
сл
ff Г.
aff ег а $ 8 t 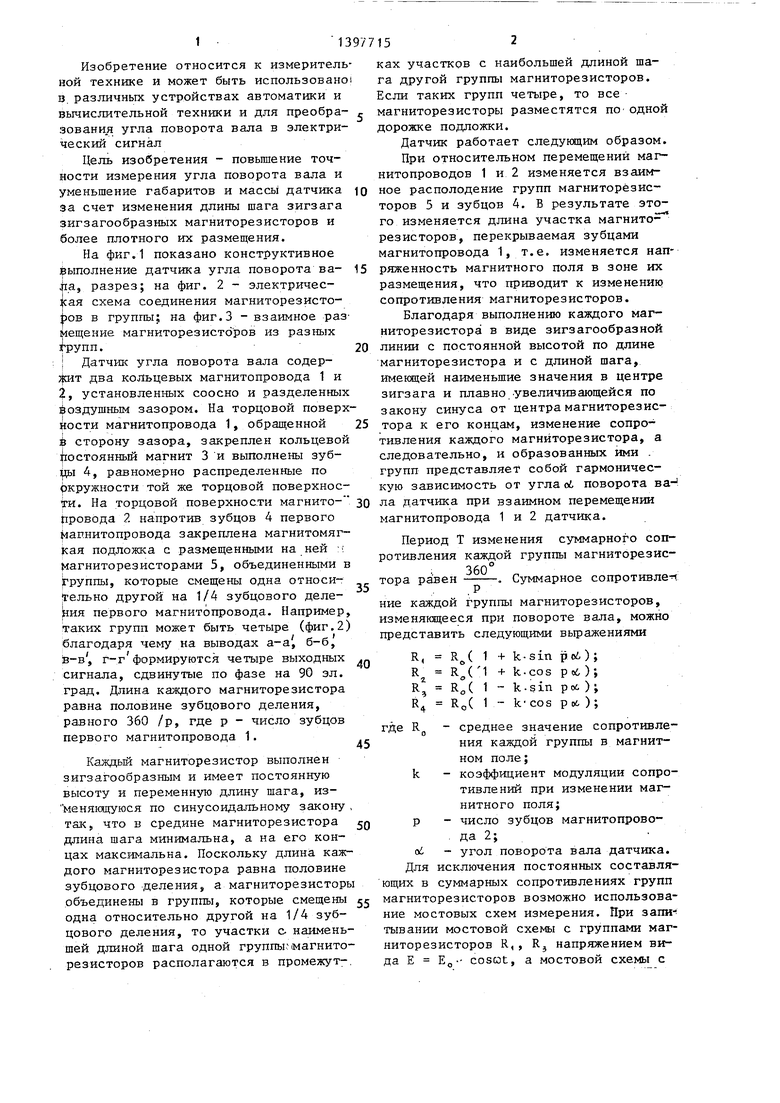
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла поворота вала | 1985 |
|
SU1263997A1 |
| Датчик угла поворота вала | 1985 |
|
SU1298526A1 |
| Датчик угла поворота | 1989 |
|
SU1702170A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| Датчик угла поворота | 1985 |
|
SU1268945A1 |
| Датчик угла поворота | 1986 |
|
SU1325296A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
| Устройство для контроля обмоток электрических машин | 1982 |
|
SU1114989A1 |
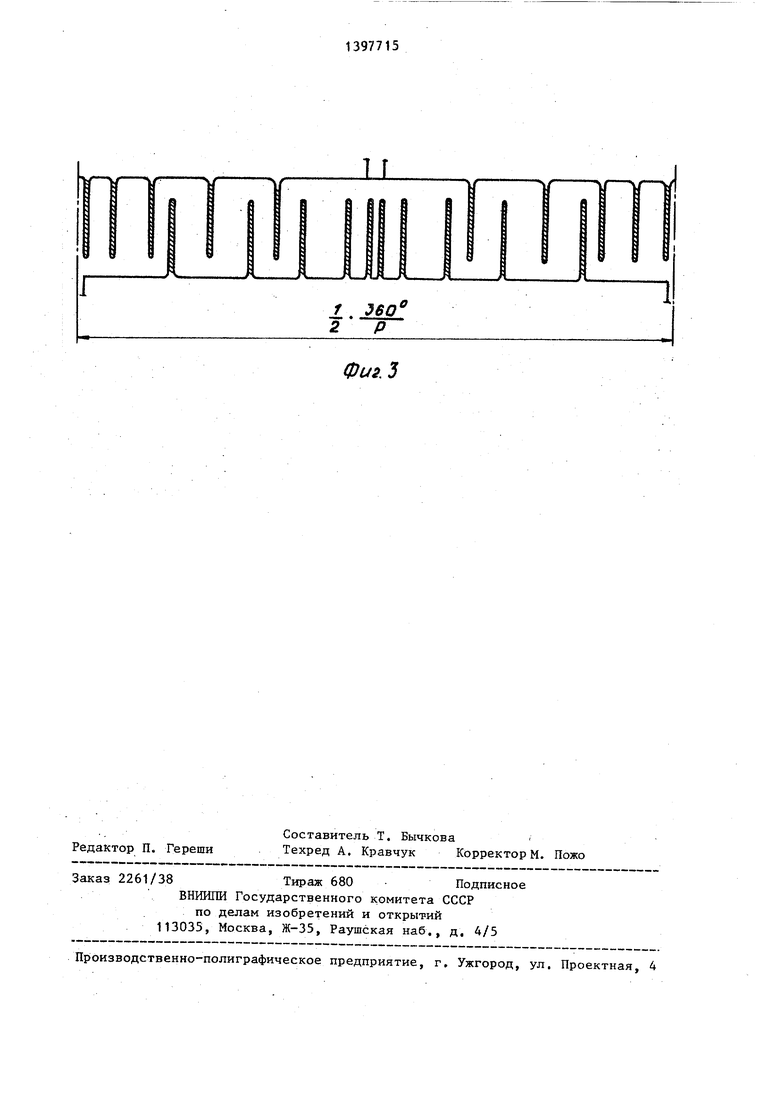
Изобретение относится к измерительной технике. Цель - повьппение точности измерения угла поворота вала при одновременном уменьшении габаритов и массы датчика за счет соот- ветствующего выполнения и взаимного расположения магниторезисторов 5, выполняющих функции чувствительного элемента датчика. Магниторезисторы 5 размещены на магнитомягких подложках одного из установленных с возможностью углового перемещения магнитопроводов датчика, на обращенной к ним торцовой поверхности второго магнитопровода выполнены зубцы 4. Каждый магниторезистор выполнен в виде зигзагообразной линии, имеющей постоянную высоту и изменяющийся по синусоидальному закону шаг, величина которого имеет наименьшее значение в середине зигзага и наибольшее по его концам. Магниторезисторы объединены в группы, смещенные одна :отно- сительно другой на половину зубцового деления второго магнитопровода. Благодаря размещению участков с наименьшей длиной шага одной группы магниторезисторов в промежутках участков лентообразного зигзага с наибольшей длиной шага другой группы магниторезисторов они могут быть расположены на общей дорожке магнитомягкой подложки, т.е. в одинаковых условиях, что уменьшает габариты датчика и повышает точность - преобразования угла поворота. 3 ил. (О
Фиг.1
Изобретение относится к измерительной технике и может быть использовано в. различных устройствах автоматики и вычислительной техники и для преобра- зования угла поворота вала в электрический сигнал
Цель изобретения - повьшение точности измерения угла поворота вала и уменьшение габаритов и массьг датчика за счет изменения длины шага зигзага зигзагообразных магниторезисторов и более плотного их размещения.
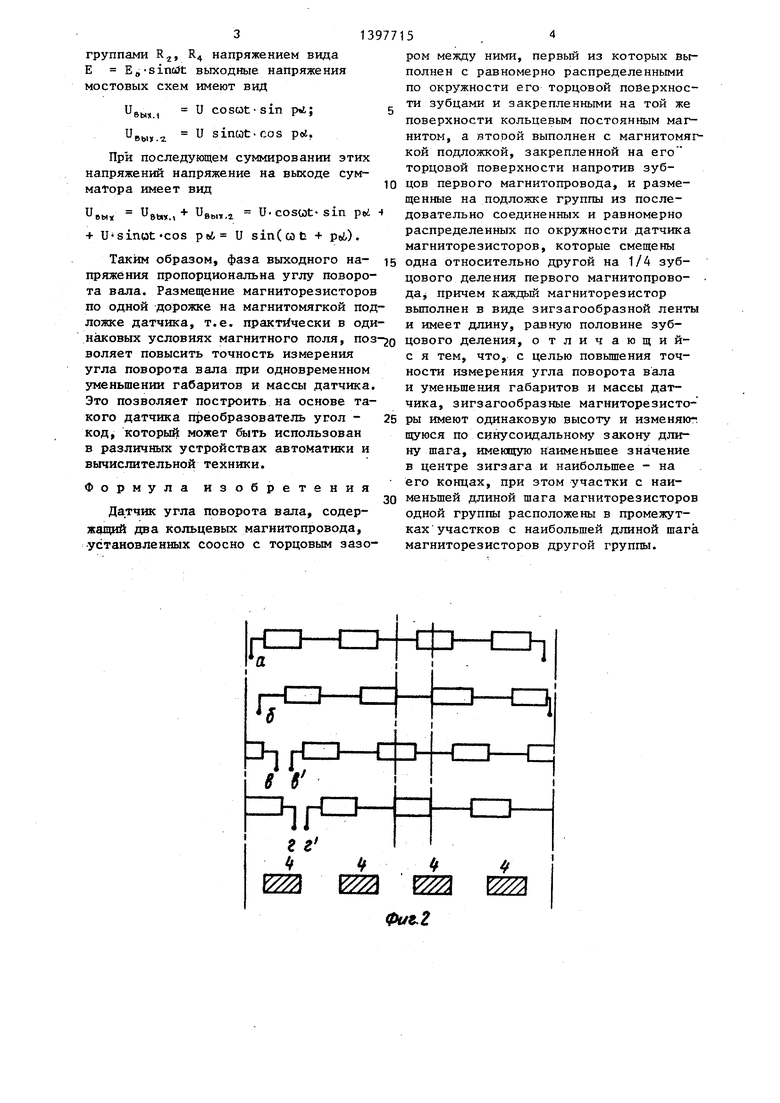
На фиг.1 показано конструктивное выполнение датчика угла поворота ва- ф:а, разрез; на фиг. 2 - электричес- сая схема соединения магниторезисторов в группы; на фиг.З - взаимное раз мещение магниторезисторов из разных |рупп.
I Датчик угла поворота вала содер- |сит два кольцевых магнитопровода 1 и 2, установлеш-й1х соосно и разделенных воздушным зазором. На торцовой поверхности магнитопровода 1, обращенной ф сторону зазора, закреплен кольцевой |юстоянный магнит 3 и выполнены зуб- jpbi 4, равномерно распределенные по окружности той же торцовой поверхности. На торцовой поверхности магнито- провода 2 напротив зубцов 4 первого мапнитопровода закреплена магнитомяг- кая подложка с размещенньми на ней :; Иагниторезисторами 5, объединенньши в ГРУППЫ, которые смещены одна относительно другой на 1/4 зубцового деле- Йия первого магнитопровода. Например, таких групп может быть четыре (фиг.2) благодаря чему на выводах а-а б-б в-в , г-г формируются четыре выходных сигнала, сдвинутые по фазе на 90 эл. град. Длина каждого магниторезистора равна половине зубцового деления, равного 360 /р, где р - число зубцов
первого магнитопровода 1.
Каждый магниторезистор выполнен зигзагообразным и имеет постоянную высоту и переменную длину шага, из- менянхцуюся по синусоидальному закону так, что в средине магниторезистора длина шага минимальна, а на его концах максимальна. Поскольку длина каждого магниторезистора равна половине зубцового деления, а магниторезисторы объединены в группы, которые смещены одна относительно другой на 1/4 зубцового деления, то участки с. наименьшей длиной шага одной группы (магниторезисторов располагаются в промежут-.
5 0
5 О ..
ках участков с наибольшей длиной шага другой группы магниторезисторов. Если таких групп четыре, то все магниторезисторы разместятся пО одной дорожке подложки.
Датчик работает следукщим образом.
При относительном перемещений маг- нитопроводов 1 и 2 изменяется взаимное располодение групп магниторезисторов 5 и зубцов 4. В результате этого изменяется длина участка магнито- резисторов, перекрываемая зубцами магнитопровода 1, т.е. изменяется напряженность магнитного поля в зоне их размещения, что приводит к изменению сопротивления магниторезнсторов.
Благодаря выполнению каждого магниторезистора в виде зигзагообразной линии с постоянной высотой по длине магниторезистора и с длиной шага, имеющей наименьшие значения в центре зигзага и плавно увеличивающейся по закону синуса от центра магниторезистора к его концам, изменение сопротивления каждого магниторезистора, а следовательно, и образованных ими . групп представляет собой гармоническую зависимость от угла ot поворота в а- ла датчика при взаимном перемещении магнитопровода 1 и 2 датчика.
Период Т изменения суммарного сопротивления каждой группы магниторезис- 360°
5
тора равен
Суммарное сопротивление каждой группы магниторезисторов, изменяющееся при повороте вала, можно представить следующими выражениями
R, R( 1+ k-sin poi);
R R( 1+ k-cos роб);
R, R( 1- k-sin pot );
R RO( 1 k coa роб );
где R - среднее значение сопротивления каждой группы в магнитном поле;
k - коэффициент модуляции сопротивлений при изменении магнитного поля;
р - число зубцов магнитопровода 2;
oi - угол поворота вала датчика. Для исключения постоянных составляющих в суммарных сопротивлениях групп магниторезисторов возможно использование мостовых схем измерения. При запи- тывании мостовой схемы с группами магниторезисторов R,, RJ напряжением вида Е ЕО cosQt, а мостовой схемы с
группами R, RA напряжением вида Е Ee sindat выходные напряжения мостовых схем имеют вид
и
и.
вып.
и cosot- sin и sincot- cos peJ.
Bbl.-2L
При последующем суммировании напряжений напряжение на выходе матора имеет вид
и
вых abiic., + вы. U-cosoat-sin pei + U sinot cos pet и sin (cot + ).
Таким образом, фаза выходного на- 15 пряжения пропорциональна углу поворота вала. Размещение магниторезисторов по одной дорожке на магнитомягкой подложке датчика, т.е. практически в одинаковых условиях магнитного поля, no3-2Q воляет повысить точность измерения угла поворота вала при одновременном уменьшении габаритов и массы датчика. Это позволяет построить на основе такого датчика преобразователь угол - код, который может быть использован в различных устройствах автоматики и вычислительной техники.
10
25
Формула изобретения
Датчик угла поворота вала, содержащий два кольцевых магнитопровода, установленных соосно с торцовым зазо
5 Q
ром между ними, первый из которых выполнен с равномерно распределенными по окружности его торцовой пойерхнос ти зубцами и закрепленными на той же
о
поверхности кольцевым постоянным магнитом, а второй выполнен с магнитомягкой подложкой, закрепленной на его торцовой поверхности напротив зуб0 цов первого магнитопровода, и размещенные на подложке группы из последовательно соединенных и равномерно распределенных по окружности датчика магниторезисторов, которые смещены одна относительно другой на 1/4 зуб- цового деления первого магнитопрово- . дaj причем каждагй магниторезистор вьшолнен в виде зигзагообразной ленты и имеет длину, равную половине зуб- цового деления, отличающий- с я тем, что, с целью повышения точности измерения угла поворота вала и уменьшения габаритов и массы датчика, зигзагообразные магниторезисто- ры имеют одинаковую высоту и изменяю-, щуюся по синусоидальному закону длину шага, именщую наименьшее значение в центре зигзага и наибольшее - на его концах, при этом участки с наи0 меньшей длиной шага магниторезисторов одной группы расположены в промежутках участков с наибольшей длиной шага магниторезисторов другой группы.
5
ffH/t.Z
I
фиг. 5
И
| Датчик угла поворота вала | 1985 |
|
SU1263997A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
