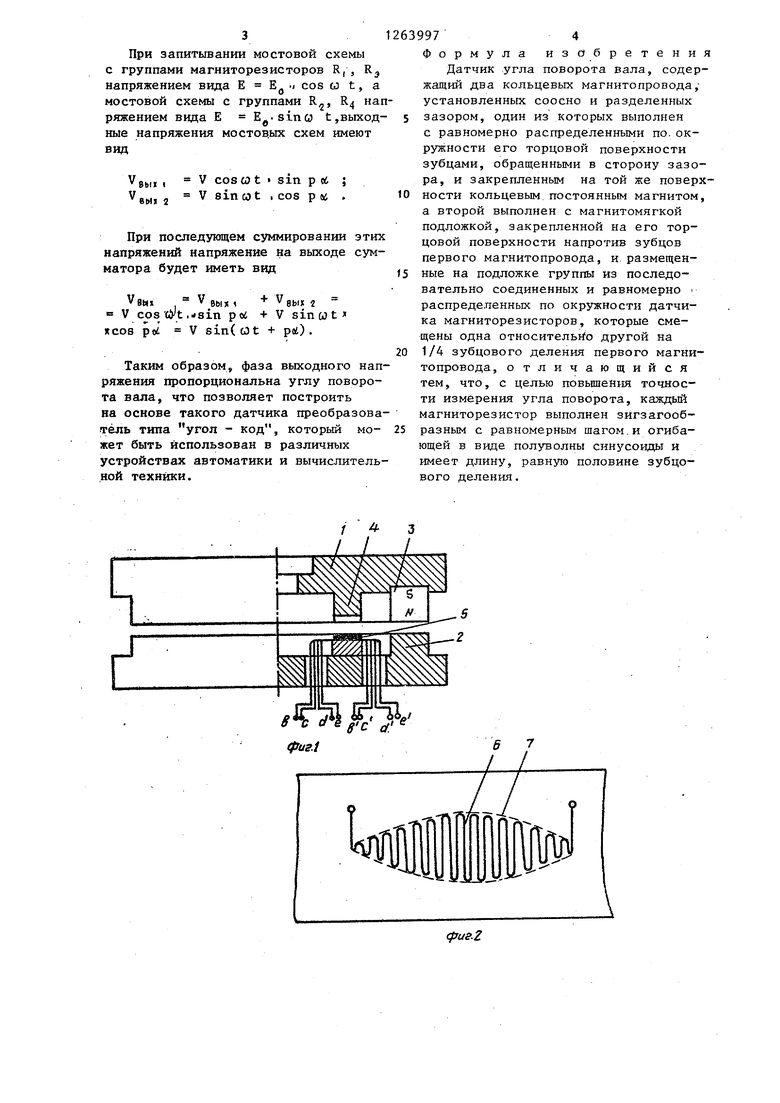
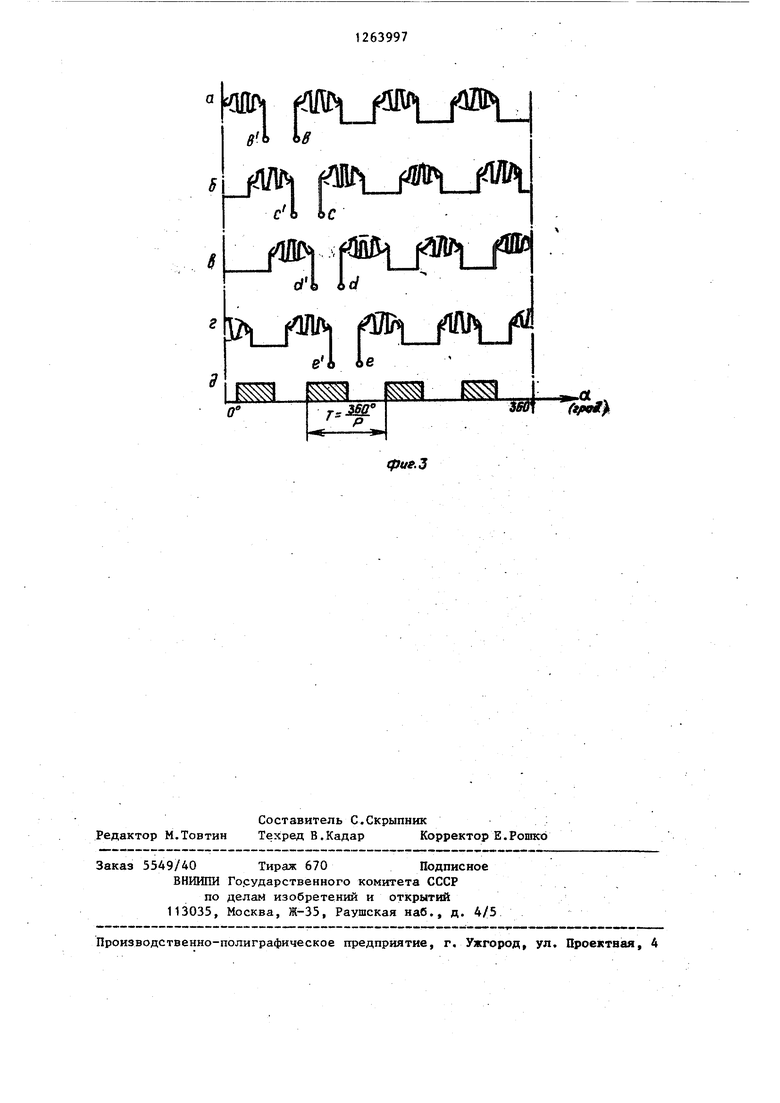
со Изобретение относится к измерительной технике и может быть исполь зовано в различных устройствах автом тики и вычислительной техники и для преобразования угла поворота вала в электрический сигнал. Цель изобретения - повьшение точ ности измерения угла поворота вала путем повышения точности формирования синусоидальной характеристики преобразования в функции угла. На фиг. 1 показано конструктивное выполнение датчика, разрез; на фиг. 2 - схематическое выполнение магниторезистора; на фиг. 3 - участ ки групп магниторезисторов и зубцов магнитопровода в развертке. Датчик угла поворота вала содер-жит два кольцевых магнитопровода 1 и 2, установленных соосно и разделенных воздушным зазором. На торцовой поверхности магнитопровода 1, обращенной в сторону зазора, закреп лен кольцевой постоянный магнит 3 и выполнены зубцы 4, равномерно рас пределенные по окружности той же торцовой поверхности. На торцовой поверхности магнитопровода 2 напротив зубцов 4 первого магнитопровода закреплена магнитомягкая подложка с размещенньми на ней магниторезисторами 5, объединенными в группы смещенными одна относительно другой на 1/4 зубцового деления первого ма нитопровода. Например, таких групп может быть четыре (фиг. За, В, S и ), благодаря чему на выходах датчи ка (зажимах в-в с/с, d-d ис-с) формируются четыре выходных сигнала сдвинутых по фазе на 90 эл. град. Длина каждого магниторезистора. равн половине зубцового деления, равного 3607р,где р - число зубцов первого магнитопровода. 1,а по форме магниторезистор представляет собой зигза 6 с равномерным шагом, величина кот рого значительно меньше зубцового деления, и огибающей 7 - в виде полуволны синусоиды. Таким образом, каждый магНиторезистор 5 имеет наибольшую высоту в центральной части и наименьшую - по концам при плавно изменении высоты зигзага по полуволне синусоиды. Датчик работает следующим образом . При относительном перемещении магнитопроводов 1 и 2 изменяется вз 7 имное рдсположение зубцов 4 магнитопровода 1 (фиг. 3) и групп магниторезисторов 5 (фиг. За, & ,В ,1 ). В результате изменяется длина участков магниторезисторов, перекрываемая зубцами магнитопровода, т.е. изменяется напряженность магнитного поля в зоне их размещения, что приводит к изменению сопротшзления магниторезисторов. Благодаря выполнению каждого магниторезистора в виде зигзагообразной линии, огибающая которой является полуволной синусоиды, изменение его сопротивления при взаимном перемещении магнитопроводов 1 и: 2 представляет собой синусоидальную зависимость от угла об поворота вала. Объединение магниторезисторов в группы, в которых магниторезисторы равномерно расположены по окружности, соединены последовательно и смещены относительно магниторезисторов соседней группы на 1/4 зубцового деления, , причем длина магниторезистора равна 1/2 зубцового деления, обеспечивает при взаимном перемещении магнитопроводов 1, 2 изменение суммарных сопротивлений групп магниторезисторов по закону синуса (косинуса) угла поворота вала. Период изменения cyfjMapHojrp сопротивления каждой группы магните360°резисторов Р Суммарное сопротивление каждой группы магниторезисторов, изменяющееся при повороте вала, -можно предстдвить следующими выражениями; R, Rgd + K-sin p)l RZ Rgd -( К-cos pV); R Rod- K-sin p л); R Rod - K..COS p л ); где Rg - среднее значение сопротивления каждой группы в магнитном- поле; К -коэффициент модуляции сопротивлений при изменении магнитного поля; р - число зубцов магнитопровода 1 5 об - угол поворота вала. Для исключения постоянных составляющих в суммарных сопротивлениях групп магниторезисторов возможно использование мостовых схем измерения. при запитывании мостовой схемы с группами магниторезисторов R, , R. напряжением вида Е Е ., cos ы t, а мостовой схемы с группами R, R на ряжением вида Е E -sinw t,выход ные напряжения мостовых схем имеют вид 8ы« I V coswt sin р л ; вМ 2 SinWt cos р Oii . При последующем суммировании этих напряжений напряжение на выходе сум матора будет иметь вид ви V бь|х, + Vgb,, J в V cos wt.-sin poi + V sinut xcos poi V sin(tot + poi) . Таким образом, фаза выходного нап ряжения пропорциональна углу поворота вала, что позволяет построить на основе такого датчика преобразова тель типа угол - код, который может быть использован в различных устройствах автоматики и вычислитель ной техники. 997 Формула изс бретения Датчик угла поворота вала, содержащий два кольцевых магнитопровода; установленных соосно и разделенных зазором, один из которых выполнен с равномерно распределенными по. окружности его торцовой поверхности зубцами, обращенными в сторону зазора, и закрепленным на той же поверхности кольцевым постоянньм магнитом, а второй выполнен с магнитомягкой подложкой, закрепленной на его торцовой поверхности напротив зубцов первого магнитопровода, и размещенные на подложке группы из последовательно соединенных и равномерно распределенных по окружности датчика магниторезисторов, которые смещены одна относитель о другой на 1/4 зубцового деления первого магнитопровода, отличающийся тем, что, с целью повышения точности измерения угла поворота, каждьй магниторезистор выполнен зигзагообразным с равномерным шагом.и огибающей в виде полуволны синусоиды и имеет длину, равную половине зубцового деления.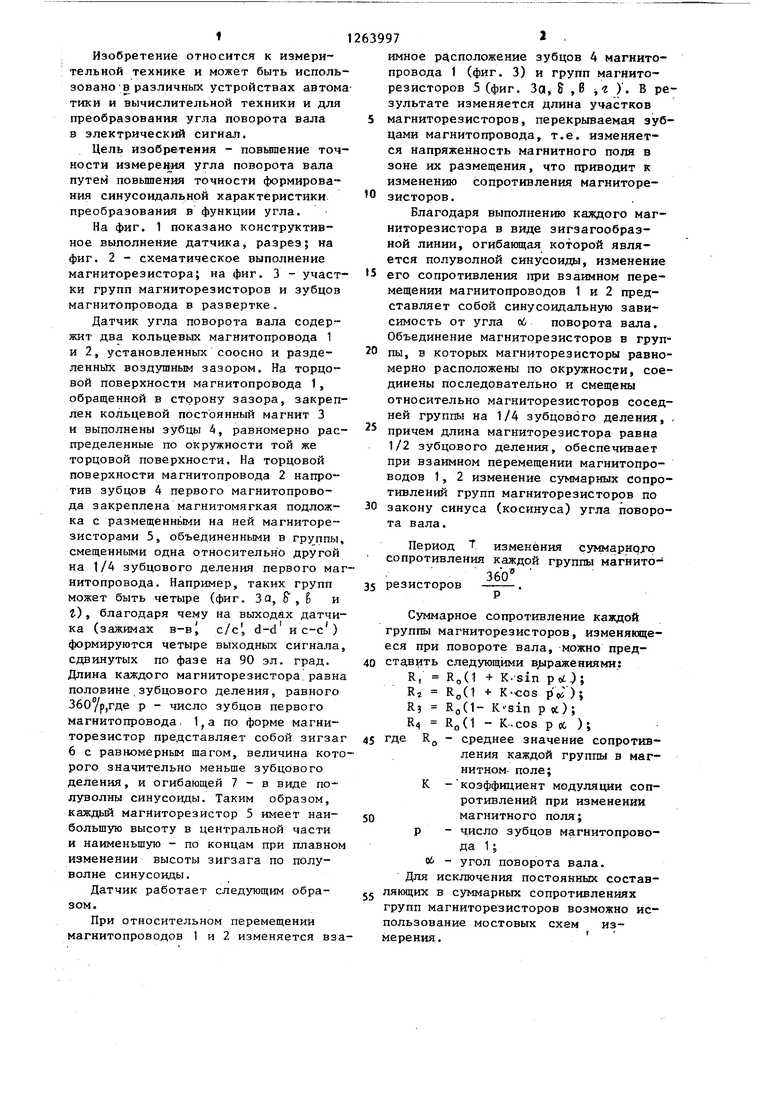
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла поворота вала | 1986 |
|
SU1397715A1 |
| Датчик угла поворота вала | 1985 |
|
SU1298526A1 |
| Датчик угла поворота | 1989 |
|
SU1702170A1 |
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| Датчик угла поворота | 1985 |
|
SU1268945A1 |
| Датчик угла поворота | 1986 |
|
SU1325296A1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| Датчик угла поворота вала | 1977 |
|
SU705261A1 |
Изобретение относится к измерительной технике и может быть использовано для преобразования угла поворота вала в электрический сигнал в различных устройствах автоматики и вычислительной техники. Целью изобретения является повьппение точиости измерения угла поворота вала путем повышения точности формирования гармонических выходных сигналов датчика в функции угла поворота вала, благодаря выполнению магниторезисторов таким образом, чтобы их сопротивление изменялось по гармонической функции от угла поворота. Датчик угла поворота содержит два кольцевых магнитопровода, на одном из которых закреплен кольцевой постоянньй магнит и выполнены зубцы. На торце второго магнитопровода напротив зубцов размещена магнитомягкая подложка с группами магниторезисторов. Каждый магниторезистор выполнен в виде зигзага с равномерным шагом и огибающей в виде полуволны синусоиды. Длина каждого магниторезистора равна 1/2 зубцового деления. В каждой группе магниторезисторы соединены между собой последовательно, распределены равномерно по окружности и смещены отноSS сительно магниторезисторов соседней (Л группы на 1/4 зубцового деления.Это позволяет формировать вьгходные сигналы датчика в виде гармонически . изменяющихся сопротивлений групп магниторезисторов при относительном перемещении зубцов одного магнитопровода относительно магниторезисторов, размещенных на другом магнитопроводе. 3 ил.
.ГЙСт
фигЛ
6 7 //
т (
а
Л W
f
р
«ЕШ /%й«г
(ffuf.3
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
