(Л
Изобретение относится к стендам дпя испытания лебедок,
Цель изобретения - повьЕцение удобства эксплуатации путем регулирова- ния угловой скорости вращения барабана стендовой лебедки.
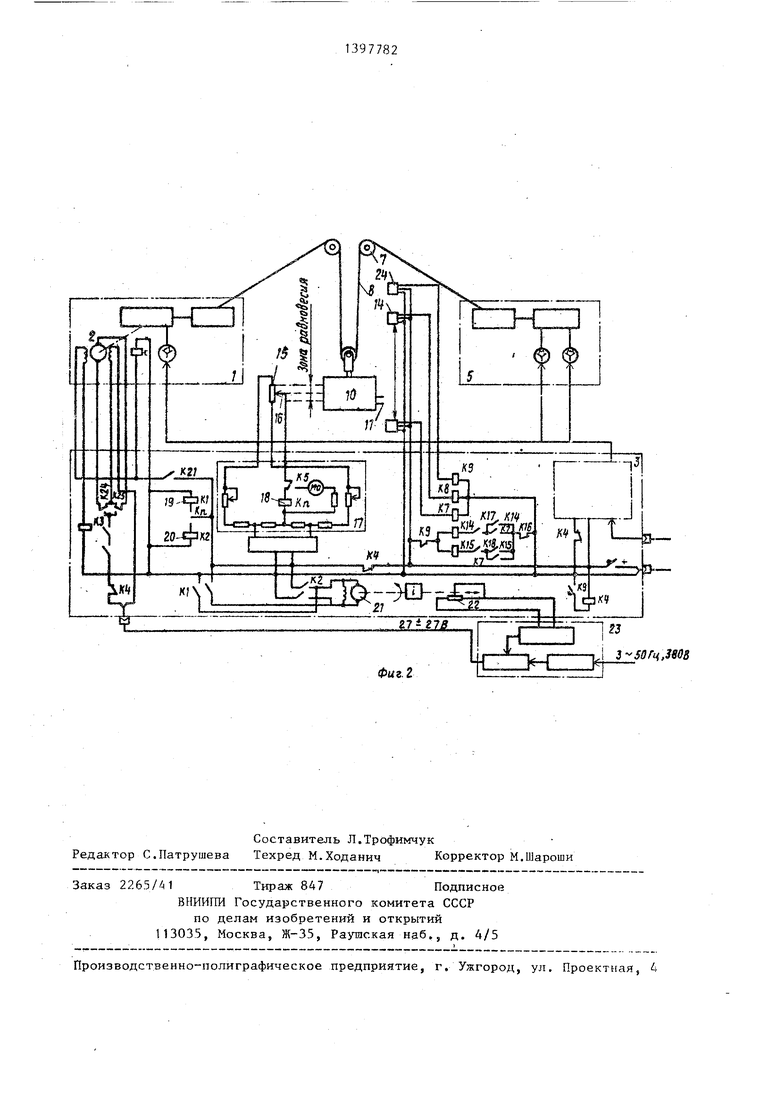
На фиг„ 1 изображен стенд для испытания лебедки, общий вид| на фиг.2- комбинированная схема стенда и пульта,
Стенд .Д.ПЯ испытания лебедки содер- даят стендовз ю нагружа ощую лебедку 1, с дополнительным приводом 2 постоянного тока,, пульт 3 управления и раму, включающую стойки k и поперечную балку 55 на которой установлен кронштейн 6 и два ролика 7. На тросе 8 испытуемой лебедки 9 подвешен тари-. рованньй груз 10 с флажком 11 и за- .хватами, которые удерживают груз на направляющих 12. На одной из направляющих 12 установлены концевые выключатели 13 и 14, а на другой датчик 15 положения груза, выполненный в ввде проволочного резистора с ползу- ном 16, который соединен с грузом 1СТ, В плечо моста 17 постоянного тока подключен датчик 15, а в диагональ моста 17 - поляризованное реле 18, подключенное через промежуточные ре- ле 19 и 20 - к микродвигателю 21, механически связанному с переменным резистором 22, включенньм в цепь электромагнита угольного регулятора
Сердечник электромагнита механи- чески через пружину связан со столбом угольных пластин угольного регулятора. Последний установлен в цепи обмотки возбуждения генератора преобразователя 23J питающего дополни- тельньй привод 2 стендовой лебедки 1,
При вьтуске троса 8 с полного барабана испытуемой лебедки 9 линейная скорость сматываемого с него троса 8 будет больше, чем линейная скорость наматывания ,троса 8 на пустой барабан стендовой лебедки 1„ Вследствие этого груз 10 вместе с полузном 16 пойдет вниз и датчик 15 выдает сигнал рассогласования плеч моста 17 в диагонали которого сработает поляризованное реле 18, которое через проме жуточное реле 19 подключает микро электродвигатель 21. Последний пово- рачивает ось переменного резистора 22 3 результате/чего изменяется сопротивление цепи электромагнита, сердечник которого перемещается и через пружину сжимает столб угольных пластин регулятора.
Вследствие этого уменьшается сопротивление столба угольных пластин, увеличивается ток в обмотке возбуждения генератора, напряжение на выходе генератора и на якоре привода 2 стендовой лебедки 1. Обороты барабана стендовой лебедки -1 увеличиваются, скорость наматывания троса 8 на барабан стендовой лебедки 1 возрастает, что приводит к выравниванию линейных скоростей троса 8 на барабанах обеих лебедок. Таким образом, груз 10 остается в зоне равновесия.
По мере перемотки троса 8 с испытуемой лебедки 9 диаметр троса на ее барабане уменьшается , на барабане стендовой лебедки 1 - возрастает, поэтому линейная скорость троса 8 на барабане стендовой лебедки 1 тоже увеличивается, а на барабане испытуемой лебедки 9 - уменьшается. Вследствие этого груз 10 поднимается вместе с ползуном 16 датчика 15, сигнал рассогласования которого вызывает срабатывание поляризованного реле 18. Это срабатывание обеспечивает подключение через промежуточное реле 20 микро- электродвигателя 21 с вращением его ротора в противоположную, чем было вначале процесса вьшуска троса, сторону. В этом случае уменьшается напряжение на выходе преобразователя 23 и на якоре дополнительного привода 2 стендовой лебедки 1, обороты барабана которой снижаются в направлении выравнивания линейных скоростей троса 8 на барабанах обеих лебедок. Таким образом схема пульта 3 стремится отработать так, чтобы груз 10 остался в зоне равновесия.
При выходе груза 10 из зоны равновесия флажок 11 приходит во взаимодействие с концевым выключателем 14, который посредством содержащихся в пульте контакторов для реверсирования дополнительного электропривода 2 изменяет полярность питания якоря дополнительного электропривода 2, ротор которого начинает вращаться в сторо- ну, противоположную направлению вращения основного электропривода стендовой лебедки . Планетарная передачи вьщает на барабан стендовой лебедки 1 разность угловьк скоростей вращения этих приводов. В результате этого вращение барабана стендовой лебедки 1 замедляется и происходит выравнивание линейных скоростей движения тро.са 8 на барабанах обеих лебедок.
При уборке троса. 8 испытуемой лебедки 9 стендовая лебедка 1 работает на выпуск троса 8. Выравнивание линейных скоростей троса 8 на барабана обеих лебедок происходит путем изменения вращения барабана стендовой лебедки аналогично описанному.
В этом режиме груз 10 может дойти до нижнего концевого выключателя 13, сигнал с которого поступает на соответствующие контакторы пульта 13 и обеспечивает реверсирование электропривода 2 стендовой лебедки 1, вследствие чего скорость вращения барабан стендовой лебедки 1 снижается. Груз выходит из зоны действия концевого выключателя 13 и входит в зону равновесия.
Стенд снабжен аварийным концевым выключателем 24, расположенным вьше верхнего концевого выключателя 14. При отказе автоматики, проскакивании флажком 11 через концевой выключател 14, флажок Л1 взаимодействует с аварийным концевым выключателем 24, сигнал с которого отключает напряжение с обеих лебедок. Процесс испытания прекращается.
Формула изобретения
стоГ ки и поперечную балку, на которой .установлен поворотный кронштейн и два ролика, тарированный груз, имеющий возможность подвешивания на тросе испытуемой лебедки, отличающи й- с я тем, 4TOj с целью повышения удобства эксплуатации путем регулирования угловой скорости вращения барабана
0 стендовой лебедки, последняя снабжена, электродвигателем постоянного тока и подключена к пульту управления посредством электрической цепи, включающей мост постоянного тока, поляри5 зованное реле в- его диагонали, микроэлектродвигатель, коммутируемый этим поляризованным реле через промежуточное реле, угольньш регулятор с элект- . ромагнитом, резистор, включенньй в
0цепь электромагнита и связанный с осью микроэлектродвигателя, преобразователь с генератором, в цепь обмотки возбуждения которого включен электромагнит угольного регулятора, при
5 этом стойки снабжены направляющими, на одной из которых установлен датчик положения груза в виде проволочного резистора с ползуном, а на другой - два концевых выключателя, причем пер0 вый из них установлен выше, а другой- ниже датчика положения груза, тарированный груз механически связан с ползуном датчика положения груза и снабжен флажком, установленным с воз5 мощностью взаимодействия с упомянутыми выключателями, а датчик положе
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТЯГОВОЙ ЛЕБЕДКИ | 2019 |
|
RU2714848C1 |
| Стенд для испытания лебедок | 1989 |
|
SU1691709A1 |
| Кабельный кран | 1961 |
|
SU143527A1 |
| Стенд для испытания гидропневмопоршневых натяжителей плавучих буровых установок | 1983 |
|
SU1137180A1 |
| Устройство для уравновешивания подвешенного груза | 1977 |
|
SU659513A1 |
| СЕТНД ДЛЯ НАТУРНЫХ ИСПЫТАНИЙ НА УДАР ЭКИПАЖЕЙ РЕЛЬСОВОГО ТРАНСПОРТА | 1989 |
|
RU2013763C1 |
| Грузозахватное устройство | 1990 |
|
SU1787921A1 |
| Стенд для испытания лебедок | 1977 |
|
SU642618A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| Стенд для испытания лебедки | 1989 |
|
SU1659768A1 |
Изобретение относится к стендам для испытания лебедок..Цель изобретения - позьшзение устройства эксплуатации путем регулирования узловой скорости вращения барабанов обеих лебедок. Стенд содержит нагружающую лебедку 1 с приводом, пульт управления и раму, включающую стойки 4 и поперечную балку 5, на которой установлены кронштейн 6 и два ролика 7. На тросе испытуемой лебедки 9 установлен тарированный груз 10 с флажком и захватами, которые удерживают груз 10 на направляющих 12. На одной из направляющих 12 установлены бесконтактные концевые выключатели 13 и 14, а на другой - датчик 15 положения груза, выполненный с проволочным резистором и ползуном 16, который соединен с грузом 10. 2 ил.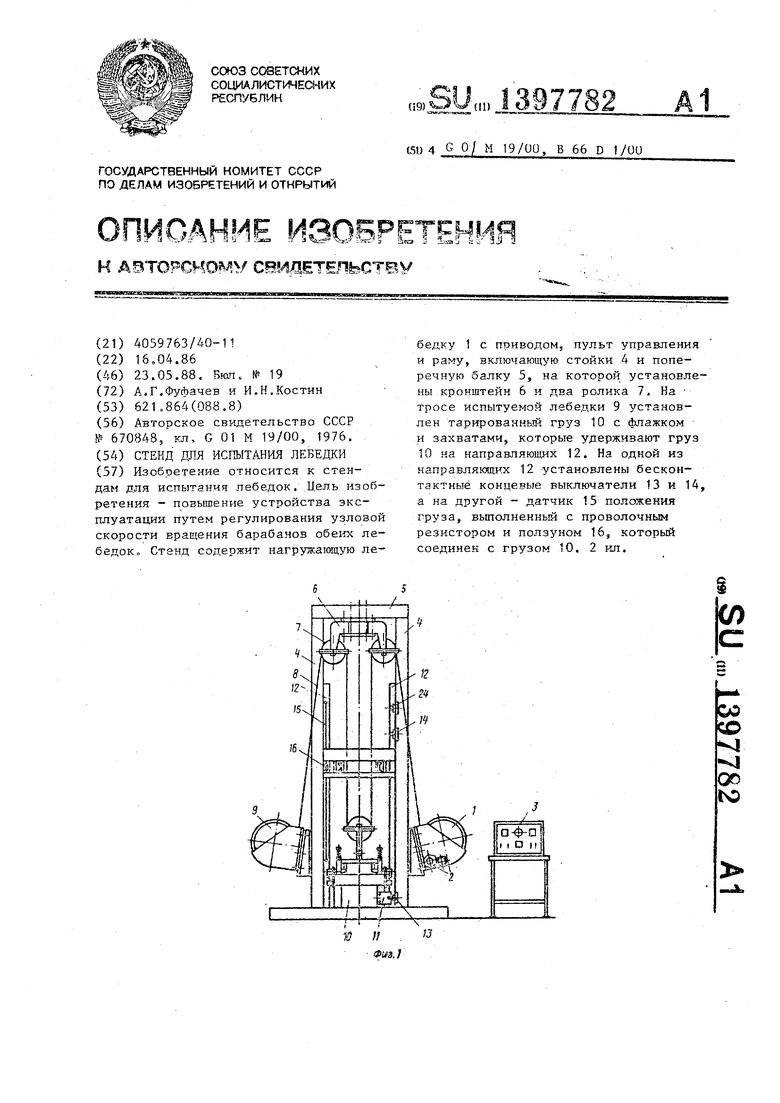
ния груза подключен проволочным ре- Стенд для испытания лебедки, со- зистором к мосту постоянного тока в держащий стендовую лебедку с приводом, его плече и ползуном к поляризованно- пульт управления и раму, включаняцую до му реле.
3-50Гц,Зт
Фиг. 2
| Стенд для испытания лебедок | 1978 |
|
SU670848A1 |
