со со
vj
ас
со
Изобретение относится к электротехнике и автоматике и может быть использовано при создании систем управления пьезоэлектрическими исполнительными элементами для пре1;изион- ных перемещений в оптико-механических приборах, в технологическом оборудовании для обработки металлов резанием, в механических сканирующих устройствах.
Целью изобретения является повышение быстродействия пьезодвигателя
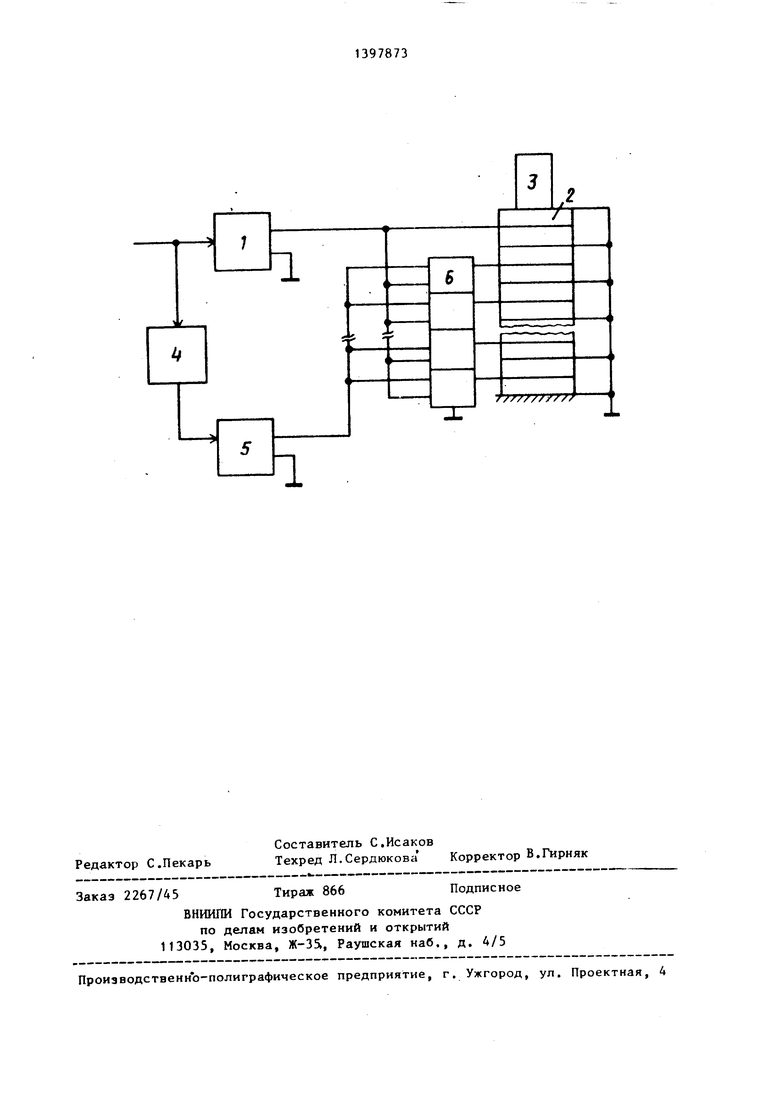
На чертеже представлена функциональная схема устройства для управ- лення пьезодвигателем.
Устройство содержит первый усилитель 1, пьезодвигатель 2, исполнительный орган 3, форсирующее звено 4, второй усилитель 5 и (N-1) сог- ласую цих сумматоров 6.
Пьезодвигатель 2 установлен на жестком основании и вьтолнен в виде наборного пьезостолба из пьезоэлектрических пластин, составленного из N секций, и представляет собой объек управления с распределенными параметрами .
г
Устройство работает следующим образом.
Управляющий сигнал поступает на входы первого усилителя 1 и форсирующего звена 4 с передаточной функцией вид которой определяется параметрами пьезостолба 2, исполнительного орга- на 3 и зависит от количества секций, на которые разбит пьезостолб. Так, при разбиении столба 2 на N одинаковых секций передаточная функция форсирующего звена А имеет вид
W,(P)
де Т „
1 1 Т V Р
1
fl N С
Я
- 2 Г ,-v гч
Л О
3&
1 fl+2tN
V / N С
1 -, ,, . .
)
1
45
механическая постоянная времени секции. С;
постоянная времени демпфирова-50
ния секции, сj
механическая постоянная времени исполнитель нот органа 3,с; длина активной ча ;ти п .е чостол- . м;
CKopocTi, pac .ripo- стра}1еиия звука в пьезоматериа- ле, м/с;
механическая добротность пьезо- материала;
Q
5
0
5
5
0
nii m.
отношение массы исполнительного органа 3 к массе пьезостолба 2.
Управляющее напряжение с выхода первого усилителя 1 поступает на ближайшую к исполнительному органу 3 секцию пьезостолба непосредственно, а на остальные секции - через согласующие сумматоры 6 . Сигнал с выхода форсирующего звена 4 усиливается вторым усилителем 5, с выхода которого управляющее напряжение поступает на первые входы (N-1) согласующих сумматоров 6. Согласующие сумматора 6 суммируют управляющие напряжения с выходов первого и второго усилителей.
Таким образом, на каждой из секций пьезостолба формируются различные напряжения, определяемые входным сигналом устройства, параметрами форсирующего звена 4 и коэффициентами суммирования по первым входам К согласующих сумматоров 6.
При разбиении пьезостолба на N одинаковьп секций и выборе К,- в со- отйетствии с выражением
К . 2 -i + К .
1 -fi
где i - индекс секции (1 il iN-1), возрастающий от i 1 для секции, ближайшей к месту крепления пьезостолба 2 на неподвижном основании, до i N для секции, ближайшей к исполнительному органу 3, причем К HJ О,
быстродействие пьезодвигателя может быть повьш1ено в N раз по гравнению со случаем управления всеми секциями пьемостолба по одинаковому закону. При управлении всеми секциями пье пэ- столба по одинаконому закону, погле изм« нения управляипце1 (1 на11ряжги тя на иьезостолбе, н ИРМ одипнре к нпп по нсей длине его -чктнпиой изменяется механичкч к.чя иларчжсписич ь , а мо.ханичегко1 .чиилгиги и.нппьчс г.-я
с ГК рРМеШРИИЛ lhU f |i V ,1111 I и. 1:1 1- ЫЧ,
соединенного с исполнительным органом. Далее приходит в движение следующий, более глубинный слой столба и т.д., т.е. развивается волновой процесс, распространянщийся со скоростью звука от исполнительного органа к основанию пьезодвигателя и обратно. Дпя такого объекта нельзя обеспечить окончание процессов управления и позиционирования за время, меньшее периода колебаний первой собственной частоты.
За счет формирования индивидуальных законов управления секциями обеспечивается согла сованное и одновременное перемещение исполнительного органа 3 X (t) и пропорциональная этому перемещению деформация d;(t) каждой секции пьезостолба в соответствии с выражением
4,(t) -
Абсолютное смещение границы каждой i-й секции X (t) пропорционально ее расстоянию от места закрепления пьезодвигателя на неподвижном основании:
ний по Сравнению с однородным пьезо- Д1вигателем.
Таким образом, в устройстве реали- зуются управляющие напряжения, обеспечивающие уменьшение времени позиционирования в N раз по сравнению с устройством, реализуюш;им одновременное управление всеми секциями пьезо- столба по одинаковому закону.
Формула изобретения
Устройство .для, управления пьезо- двигателем, содержащее последовательно соединенные пьезодвигатель, вьтол- ненный в виде наборного пьезостолба из пьезоэлектрических пластин, расчлененного на N секций, и исполни- тельный орган, первый усилитель, выход которого соединен с входом N-й секции пьезостолба, соединенной с исполнительным органоА, отличающееся тем, что, с целью повышения быстродействия пьезодвигателя, дополнительно введены форсирующее звено, второй усилитель и (N-1) согласующих сумматоров, причем вход форсирующего звена соединен с входом
первого усилителя и является входом
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления пьезодвигателем | 1986 |
|
SU1397872A1 |
| Двухканальный электропривод | 1987 |
|
SU1473060A1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| Следящая система | 1979 |
|
SU842705A1 |
| Устройство для рентгеноструктурных исследований кристаллов | 1988 |
|
SU1610412A1 |
| Устройство управления пъезодвигателем | 1985 |
|
SU1366989A1 |
| Пьезопривод с коррекцией неоднозначной статической характеристики | 1988 |
|
SU1524022A1 |
| Импульсный регулятор перемещения пьезодвигателя (варианты) | 1982 |
|
SU1023278A2 |
| Двухканальный электропривод | 1989 |
|
SU1665488A1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
Изобретение относится к электротехнике и автоматике и может быть использовано при создании систем управления пьезоэлектрическими исполнительными элементами для прецизионных перемещений. Целью изобретения является повышение быстродействия пьезодвигателя. Пьезодригатель выполняется в виде наборного столба из пьезоэлектрических пластин, составленного из N секций. Для каждой из секций пьезостолба формируются различные напряжения, определяемые входным сигналом устройства, параметрами форсирующего звена и весовыми коэффициентами согласующих сумматоров. При этом развитие волновых процессов локализуется в пределах каждой секции, имеющей в N раз меньшие геометрические размеры и в N раз большую частоту собственных колеба1 1й по сравнению с однородным пьезодвигате- лем. 1 ил. (Л
X /t) X/t) .i.
При этом развитие волновых процессов локализуется в пределах каждой секции, имеющей в N раз меньшие геометрические размеры и в N раз большую частоту собственных колебаустройства, а выход - с входом второго усилителя, выход которого соединен с цервыми входами согласующих сумматоров, вторые входы которых сое- динены с выходом первого усилителя, а выходы - соответственно с входами (N-1) секций пьезостолба.
| Бутковский А.Г., Фельдбаум А.А | |||
| Методы теории автоматического управления | |||
| - М.: Наука, 1971, с | |||
| Паровая машина с периодическим парообразователем | 1922 |
|
SU676A1 |
| Пьезопривод | 1979 |
|
SU783751A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
