Изобретение относится к электротехнике и может быть использовано при создании силового нагружения в оптике, оборудовании для металлообработки, для сращивания кристаллов и т.д.
Целью изобретения является повышение срока службы электропривода путем облегчения условий работы электродвигателя по нагреву и повышение точности электропривода при использовании одного датчика.
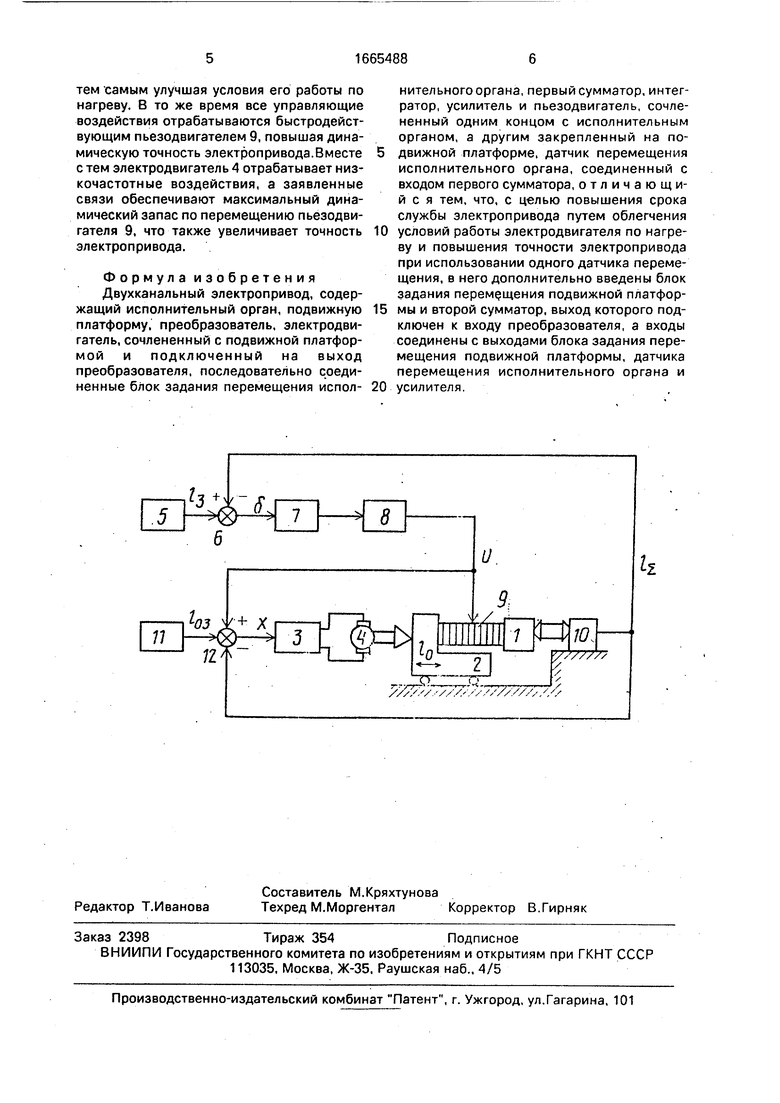
На чертеже изображена блок-схема предлагаемого электропривода.
Двухканальный электропривод содержит исполнительный орган 1, подвижную платформу 2, преобразователь 3, электродвигатель 4, сочлененный с подвижной платформой и подключенный на выход преобразователя 3, последовательно соединенные блок задания 5 перемещения исполнительного органа 1. первый сумматор 6, интегратор 7, усилитель 8 и пьезодвигатель 9, сочлененный одним концом с исполнительным органом 1, а другим закрепленный на подвижной платформе 2. датчик 10 перемещения исполнительного органа 1,.соединенный с вторым входом первого сумматора 6, а также блок задания 11 перемещения подвижной платформы 2 и второй сумматор 12, выход которого подключен на вход преобразователя 3, а входы соединены с выходами блока задания 11, перемещения подвижной платформы 2, датчика 10 перемещения исполнительного органа 1 и усилителя 8.
На схеме обозначены также сигналы: U - напряжение на выходе усилителя 8; 10з - сигнал на выходе блока задания 11 перемеО
ON СЛ
00
00
щения подвижной платформы 2; д - сигнал ошибки по положению исполнительного органа 1 на выходе первого сумматора 6; сигнал на выхода датчика 10, пропорциональный перемещению исполнительного органа 1; X - сигнал на входе преобразователя 3; 3 - сигнал на выходе блока 5 задания перемещения исполнительного органа; lo - перемещение подвижной платформы 2,
Электропривод работает следующим образом.
Задающий сигнал по положению исполнительного органа 1 с выхода блока 5 задания перемещения исполнительного органа 1 поступает на вход первого сумматора 6, где сравнивается с сигналом датчика 10 положения исполнительного органа 1. Ошибка по положению исполнительного органа 1 с выхода первого сумматора 6 поступает на вход интегратора 7, выходное напряжение которого усиливается усилителем 8. Напряжение с выхода усилителя 8 поступает на пьезодвигатель 9, который деформируется и перемещает исполнительный орган на расстояние А, пропорциональное изменению напряжения на выходе усилителя 8, а также усилию внешнего нагружения Fc, действующего на исполнительный орган
A UKo/Ky + Fc/Ky,-(1)
где К0- коэффициент обратного пьезоэффек- та., Н/В;
Ку - коэффициент упругости пьезодвигате- ля, Н/м.
Задающий сигнал, соответствующий требуемому перемещению подвижной платформы 2, поступает с выхода блока 11 задания перемещения подвижной платформы на первый вход второго сумматора 12 и далее на преобразователь 3, который подает питание на электродвигатель 4. Электродвигатель 4 включится и будет перемещать подвижную платформу 2 до тех пор, пока сигнал X на выходе второго сумматора
X 1оз + KU -iЈ (2) не станет равным нулю.
С учетом очевидных соотношений между заданными и действительными перемещениями платформы 2 и исполнительного органа ошибок по положению исполнительного органа д и ошибхи грубого канала с , выражение для X можно переписать иначе
X - К V - Д + Ј.(3)
Если коэффициент суммирования по входу второго сумматора, связанному с выходом усилителя, выбрать равным К К0/КУ, то, при отсутствии внешнего силового нагружения, действующего на исполнительный орган 1, сигнал X, согласно выражению
(3), будет равен ошибке грубого канала Ј оз - lo. Движение платформы 2 прекратится в этом случае при равенстве нулю ошибки грубого канала. При этом высокочастотные составляющие, содержащиеся в . сигналах на выходе усилителя 8 и датчика 10 перемещения исполнительного органа, взаимно компенсируются и воздействие на преобразователь 3 со стороны точного кана0 ла не поступает,
С появлением на исполнительном органе 1 возмущающих усилий, вызывающих деформацию пьезодвигателя 9, изменится сигнал на выходе датчика 10 перемещения
5 исполнительного органа, на входе интегратора 7 появится ошибка, которая интегрируется интегратором 7 и усиливается усилителем 8. Пьезодвигатель 9 деформируется, возвращая исполнительный орган 1 в
0 исходное состояние.
При появлении на исполнительном органе 1 медленно меняющегося возмущающего усилия Fc после отработки ошибки пьезодвигателем 9 сигнал с выхода датчика
5 10 перемещения исполнительного органа возвращается в исходное состояние, в то время, как сигнал на выходе усилителя 8 приобретает новое значение. В результате на выходе второго сумматора 12 появляется
О сигнал
X Fc/Ky + е (4)
управляющий электродвигателем 4. Электродвигатель 4 перемещает платформу 2 вместе с закрепленным на ней пьезодвига5 телем 9 с исполнительным органом 1. Это перемещение вызывает изменение напряжения на выходах интегратора 7 и усилителя 8. Движение платформы 2 прекратится при равенстве нулю среднего значения на0 пряжения на выходе усилителя. Смещение е 13о - lo платформы 2 под действием возмущающего усилия Fc в установившемся режиме в точности, согласно выражениям (4) и (1), равно и противоположно направле5 но деформации пьезодвигателя 9. Соглсую- щий сигнал, поступающий на вход грубого канала со стороны точного, пропорционален при этом действующему на исполнительный орган возмущающему усилию.
0 Высокочастотные сигналы, которы§ могут содержаться в сигналах на выходах усилителя 8 и датчика 10, взаимно компенсируются и на вход преобразователя 3 не поступают. Таким образом, в электроприводе с од5 ним датчиком 10 положения исполнительного органа достигается разделение каналов управления по задающему воздействию. При этом высокочастотные воздействия не поступают на электродвигатель 4,
тем самым улучшая условия его работы по нагреву. В то же время все управляющие воздействия отрабатываются быстродействующим пьезодвигателем 9, повышая динамическую точность электропривода.Вместе с тем электродвигатель 4 отрабатывает низкочастотные воздействия, а заявленные связи обеспечивают максимальный динамический запас по перемещению пьезодви- гателя 9, что также увеличивает точность электропривода.
Формула изобретения Двухканальный электропривод, содержащий исполнительный орган, подвижную платформу, преобразователь, электродвигатель, сочлененный с подвижной платформой и подключенный на выход преобразователя, последовательно соединенные блок задания перемещения испол-
нительного органа, первый сумматор, интегратор, усилитель и пьезодвигатель, сочлененный одним концом с исполнительным органом, а другим закрепленный на подвижной платформе, датчик перемещения исполнительного органа, соединенный с входом первого сумматора, отличающийся тем, что, с целью повышения срока службы электропривода путем облегчения условий работы электродвигателя по нагреву и повышения точности электропривода при использовании одного датчика перемещения, в него дополнительно введены блок задания перемещения подвижной платформы и второй сумматор, выход которого подключен к входу преобразователя, а входы соединены с выходами блока задания перемещения подвижной платформы, датчика перемещения исполнительного органа и усилителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный электропривод | 1987 |
|
SU1473060A1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2223592C1 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| Позиционный электропривод | 1983 |
|
SU1164848A2 |
| Позиционный электропривод | 1984 |
|
SU1220096A2 |
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| Позиционный электропривод | 1986 |
|
SU1403317A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Электропривод постоянного тока | 1983 |
|
SU1185517A2 |
Изобретение относится к электротехнике и может быть использовано при создании систем управления точными сканирующими устройствами. Целью изобретения является повышение срока службы электропривода путем облегчения условий работы электродвигателя по нагреву и повышение точности электропривода при использовании одного датчика. Электропривод содержит электродвигатель 4, сочлененный с подвижной платформой и подключенный на выход преобразователя 3. Пьезодвигатель 9 сочленен одним концом с исполнительным органом 1, а другим закреплен на подвижной платформе 2. В предлагаемом электроприводе обеспечиваются разделение каналов управления пьезодвигателем и электродвигателем перемещения подвижной платформы по задающему воздействию и организация связи между каналами, не допускающей прохождения высокочастотных сигналов на электродвигатель. 1 ил.
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
