х
:о ю
10
25
Изобретение относится к учебным приборам по теории механизмов и машин, предназначено для-моделирования свонстп механических систем при наглядном обучении в высших и средних технических учебных заведениях, при проведении исследовательных работ по курсу теории механизма и машин.
Целью изобретения является пову- шение наглядности.
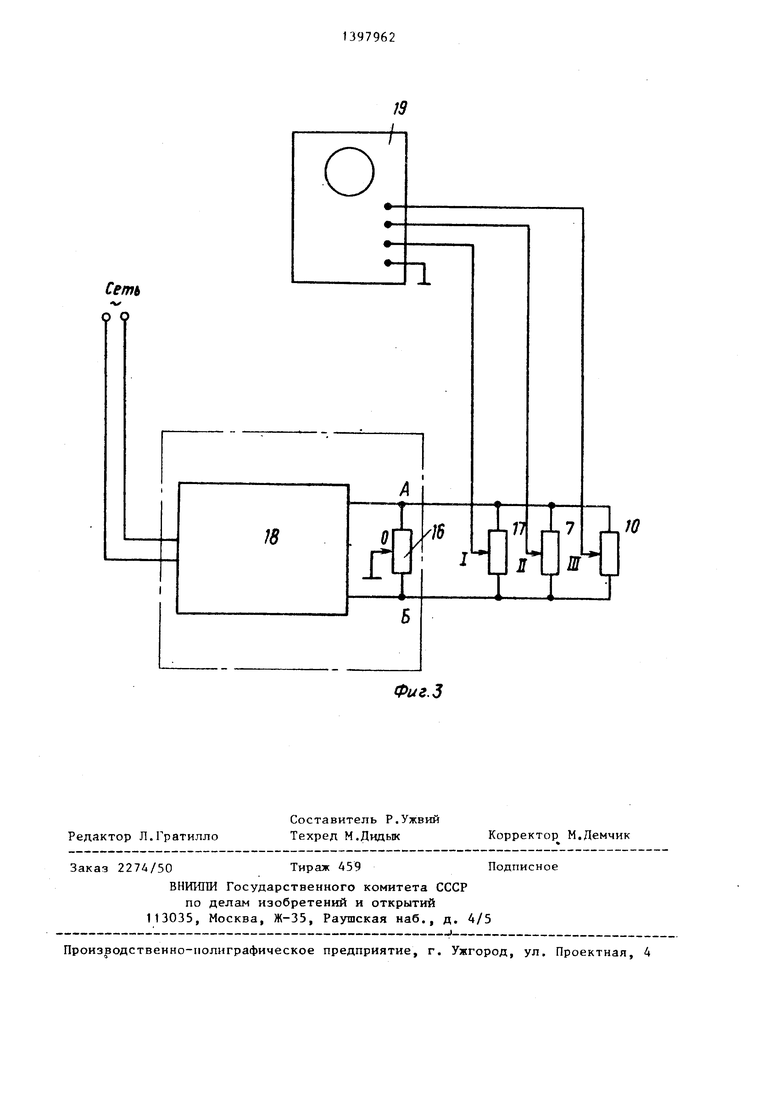
На фиг.1 показано устройство, общий вид; на фиг.2 - то же, вид сбоку; на фиг.З - схема средства регистрации параметров движения. 15
Устройство состоит из массивного основания 1 с электроприводом (имитатор качки типа ИК-5), на котором в кардановом подвесе установлен подвижный стол с вертикальным основанием 2,,20
на осях карданова подвеса 3 установлены датчики углов поворота осей, на основании вертикально закреплен макет симметричного замкнутого дифференциального механизма 4, состоящий из нижнего горизонтального двуплеч«го рычага 5 с жестко закрепленным маятником 6, на оси качания горизонтального рычага 5 установлен датчик 7 угла, верхний горизонтальный двуплечий рычаг 8 несет маятник 9 и датчик 10 измерения угла между рычагом 8 и маятником 9. В направляющих 11 вертикальные штоки 12 связывают верхню1 горизонтальный двуплечий рычаг 8 с аналогичным горизонтальным рычагом 5
Угол наклона стола с основанием изменяется по синусоидальному закону с постоянной частотой и задается посредством эксцентрикового механизма, приводимого в движение электродвигателем 14 через червячную передачу 15
В качестве датчика угла иоворота используются потенпиометрический мост, состоящий из потенпиометра балансировки 16 и трех потенциометров- датчиков 7 и 10 углов поворота, установленных соответственно на оси качания карданова подвеса имитатора качки, на оси качания нижнего горизонтального рычага на верхнем рычаге
На диагональ А-Б подается постоянное стабилизированное напряжение с сетевого источника 18 питания.
Данные об углах поворота прямо пропорциональны напря7ке1}иям, спима- емьм с диагоналей 0-Т, 0-1Т, 0-TIT потепциометричсского моста, п япют- ся на входы многоканального осг илло13979622
графа 1. Ввиду высокого (порядка сотен мегаом) входного сопротивления электронно-лучевого осциллографа перемещение движков потенциометров не оказывает взаимного влияния.
В приборе демонстрации свойств симметричного замкнутого дифференциального механизма необходимо использование имитаторов качки, так как он используется для наклона всей модели замкнутого дифференциального механизма.
Устройство работает следующим образом.
Механический электропривод 1 имитатора качки наклоняет подвижньш стол 2 на некоторый угол, при этом макет 4 отклоняется от вертикали на тот же угол. Маятник 6, сохраняя ве.ртикаль35
40
45
50
55
связанный с ним рычаг 5, рычаг 8, который, поворачиваясь вокруг мнимой оси вращения 10, сохраняет горизонтальное положение, при этом датчик 3 угла измеряет угол наклона подвижного стопа 2, датчик 7 измеряет угол поворота нижнего горизонтального рычага
5относительно макета 4, а датчик 10, установленньм на оси качания маятника 9, измеряет угол поворота верхнего рычага 8 относительно маятника 9, т.е. относительно вертикали. Данные
06углах поворотов преобразуются в электрическ то форму и передаются на устройство регистрации (осциллограф):
у становка датчиков углов поворота нижнего рычага 5 и верхнего рычага 8 относительно маятника 9;
установка макета замкнутого рычажного дифференциального механизма на имитатор качки;
установка датчиков угла наклона подвижного стола имитатора качки.
Применение многоканального электронно-лучевого осциллографа позволяет наглядно демонстрировать стабилизационные свойства симметричного замкнутого дифференциального механизма, регистрировать углы отклонения верхнего и нижнего двуплечих рычагов, а также угол наклона подвижного стола {тмитатора качки, наблн)дать визуально изменение во времени перечислен1гых углов на экране осци)глографа, сравнивать данн ые углы по вр.тщчнне, фаче, форме,
связанный с ним рычаг 5, рычаг 8, который, поворачиваясь вокруг мнимой оси вращения 10, сохраняет горизонтальное положение, при этом датчик 3 угла измеряет угол наклона подвижного стопа 2, датчик 7 измеряет угол поворота нижнего горизонтального рычага
5относительно макета 4, а датчик 10, установленньм на оси качания маятника 9, измеряет угол поворота верхнего рычага 8 относительно маятника 9, т.е. относительно вертикали. Данные
06углах поворотов преобразуются в электрическ то форму и передаются на устройство регистрации (осциллограф):
у становка датчиков углов поворота нижнего рычага 5 и верхнего рычага 8 относительно маятника 9;
установка макета замкнутого рычажного дифференциального механизма на имитатор качки;
установка датчиков угла наклона подвижного стола имитатора качки.
Применение многоканального электронно-лучевого осциллографа позволяет наглядно демонстрировать стабилизационные свойства симметричного замкнутого дифференциального механизма, регистрировать углы отклонения верхнего и нижнего двуплечих рычагов, а также угол наклона подвижного стола {тмитатора качки, наблн)дать визуально изменение во времени перечислен1гых углов на экране осци)глографа, сравнивать данн ые углы по вр.тщчнне, фаче, форме,
Формула изобретения
Устройство для демор1страции свойств дифференциального механизма, содержащее установленную на вертикальном основании модель дифференциального механизма, состоящую из двух параллельно расположенных вертикальных штоков и связанного с ними горизонтального рычага, и средство для регистрации параметров движения элементов механизма, отличающееся тем, что, с целью повышения наглядности, оно имеет связаиньш с вертикальным основанием имитатор
качки с датчиком угла попорота основания, двуплечий горизонтальный рычаг, расположенньп под первым рычагом и снязанньп с нижним концом штоков, и два маятника, один из которых соединен с осью поворота нижнего рычага, а второй связан с верхним рычагом, концы которого связаны с верхними концами штоков, при этом средство для регистрации параметров движения содержит датчик угла поворота нижнего рычага, установленный на его оси поворота, датчик угла поворота верх- него рычага и связанньБ с датчиками электронно-лучевой осциллограф.

Изобретение относится к учебным приборам по теории механизмов и машины, предназначено для моделирования свойств механических систем при наглядном обучении в высших и средних технических учебных заведениях, при проведении исследовательньпс работ по теории механизмов и машин. Целью изобретения является повышение надежностн. Для демонстрации стабилизационных свойств cnMffeTpH4Horo замкнутого дифференциального механизма модель дифференциапьнДго механизма, включающая в себя верхний и нижний горизонтальные рычаги, соединенные вертикальными штоками в прямолинейных направляющих, установлена на подвижном основании 2 имитатора качки 1 и дополнена маятником 6, жестко связанным с нижним горизонтальным рычагом 5, датчиком угла 7 на оси поворота нижне1 о горизонтального рычага 5, маятником 9 и датчиком угла на оси качания 10 маятника 9, датчиком угла 3 на оси качания подвижного стола 2 имитатора качки 1, электронно-лучевым осциллографом. Положение рычагов при приведении в действие имитатора качки регистрируется датчиками и осциллографом, 3 ил. (Л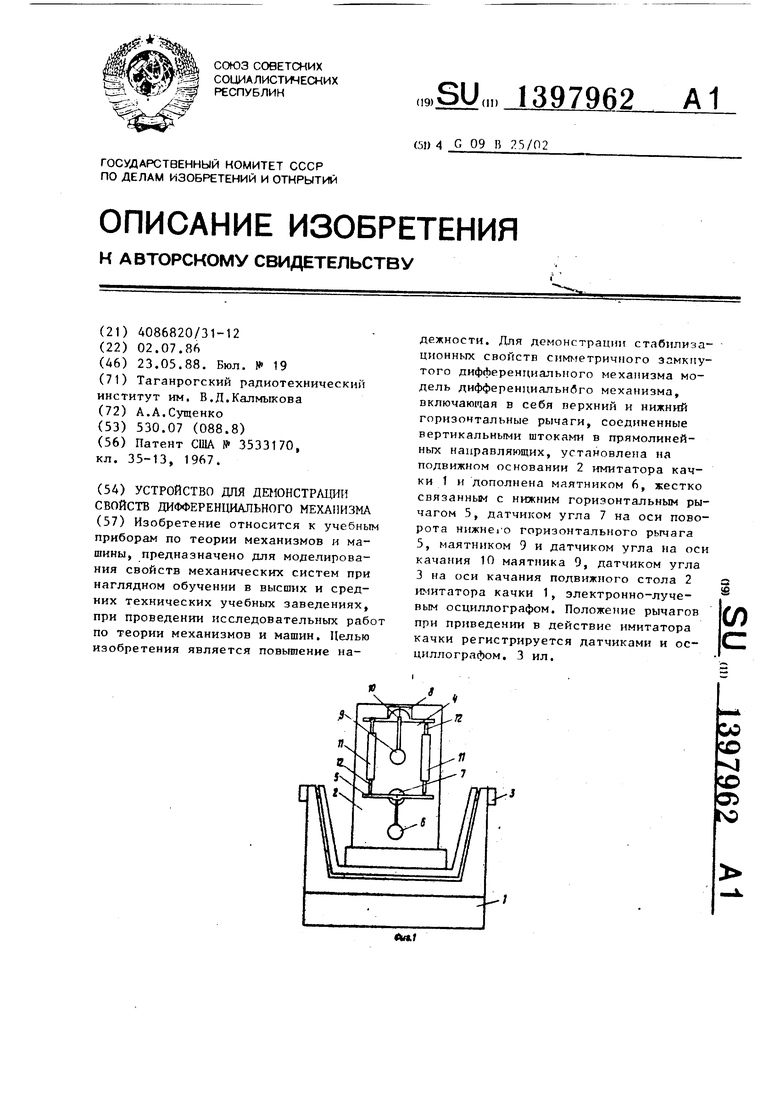
Фиг.2
Фиг.З
| Патент США № 3533170, кл | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
