Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах,
Цель изобретения - повышение производительности манипулятора за счет совмещения за один ход привода горизонтального и вертикального перемещений схвата.
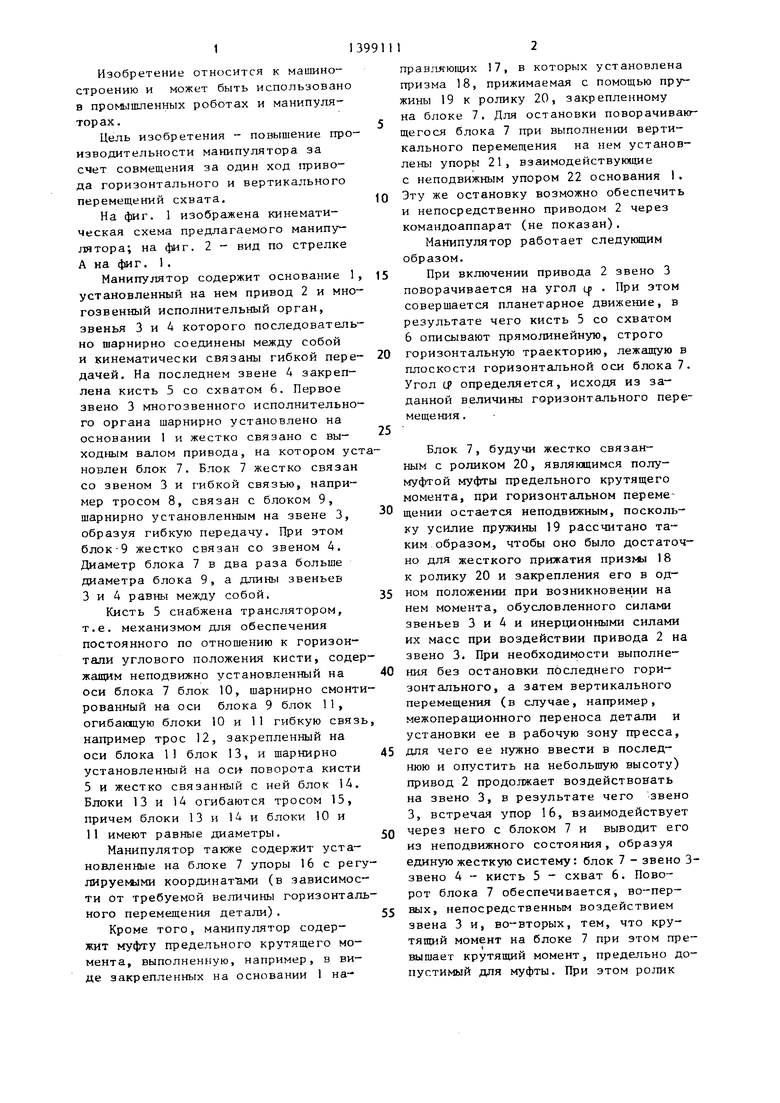
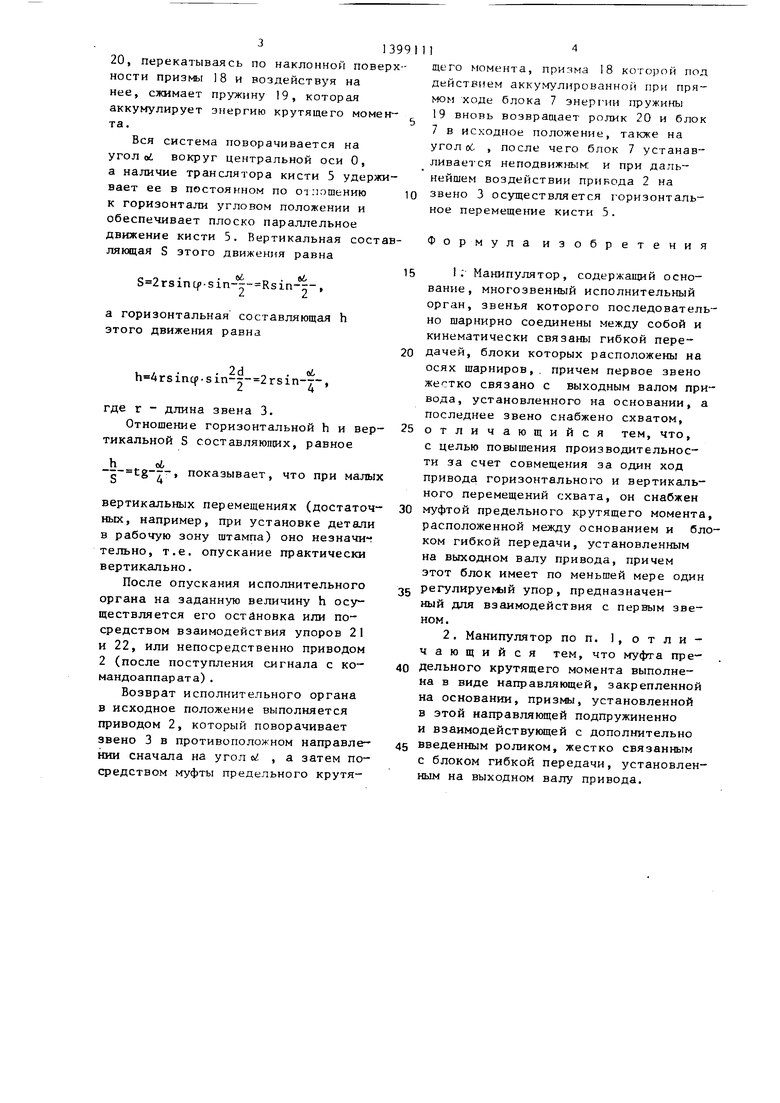
На фиг. 1 изображена кинематическая схема предлагаемого манипулятора; на фиг. 2 - вид по стрелке А на фиг. 1.
Манипулятор содержит основание 1 установленный на нем привод 2 и многозвенный исполнительный орган, звенья 3 и 4 которого последовательно шарнирно соединены между собой и кинематически связаны гибкой пере- дачей. На последнем звене 4 закреплена кисть 5 со схватом 6. Первое звено 3 многозвенного исполнительного органа шарнирно установлено на основании 1 и жестко связано с вы- ходным валом привода, на котором устновлен блок 7. Блок 7 жестко связан со звеном 3 и гибкой связью, например тросом 8, связан с блоком 9, шарнирно установленным на звене 3, образуя гибкую передачу. При этом блок-9 жестко связан со звеном 4. Диаметр блока 7 в два раза больще диаметра блока 9, а длины звеньев 3 и 4 равны между собой,
Кисть 5 снабжена транслятором, т.е. механизмом для обеспечения постоянного по отношению к горизонтали углового положения кисти, содержащим неподвижно установленный на оси блока 7 блок 10, шарнирно смонтированный н-а оси блока 9 блок 11 , огибающую блоки 10 и 11 гибкую связь например трос 12, закрепленный на оси блока 11 блок 13, и шарнирно установленный на оси поворота кисти 5 и жестко связанный с ней блок 14. Блоки 13 и 14 огибаются тросом 15, причем блоки 13 и 14 и блоки 10 и 11 имеют равные диаметры.
Манипулятор также содержит установленные на блоке 7 упоры 16 с регулируемыми координат ами (в зависимости от требуемой величины горизонтального перемещения детали).
Кроме того, манипулятор содержит муфту предельного крутящего момента, выполненную, например, в виде закрепленных на основании 1 Ha-
правляющих 17, в которых установлена призма 18, прижимаемая с помощью пружины 19 к ролику 20, закрепленному на блоке 7, Для остановки поворачиващегося блока 7 при выполнении вертикального перемещения на нем установлены упоры 21, взаимодействующие с неподвижным упором 22 основания 1. Эту же остановку возможно обеспечить и непосредственно приводом 2 через командоаппарат (не показан).
Манипулятор работает следующим образом.
При включении привода 2 звено 3 поворачивается на угол Lf При этом совершается планетарное движение, в результате чего кисть 5 со схватом 6 описывают прямолинейную, строго горизонтальную траекторию, лежащую в плоскости горизонтальной оси блока 7 Угол ср определяется, исходя из заданной величины горизонтального перемещения .
Блок 7, будучи жестко связанным с роликом 20, являющимся полумуфтой муфты предельного крутящего момента, при горизонтальном перемещении остается неподвижным, поскольку усилие пружины 19 рассчитано таким образом, чтобы оно было достаточно для жесткого прижатия приз1 1 18 к ролику 20 и закрепления его в одном положении при возникновении на нем момента, обусловленного силами звеньев 3 и 4 и инерционными силами их масс при воздействии привода 2 на звено 3. При необходимости выполнения без остановки последнего горизонтального, а затем вертикального перемещения (в случае, например, межоперационного переноса детали и установки ее в рабочую зону пресса, для чего ее нужно ввести в последнюю и опустить на небольшую высоту) привод 2 продолжает воздействовать на звено 3, в результате чего звено 3, встречая упор 16, взаимодействует через него с блоком 7 и выводит его из неподвижного состояния, образуя единую жесткую систему: блок 7 - звено 3 звено 4 - кисть 5 - схват 6. Поворот блока 7 обеспечивается, во-первых, непосредственным воздействием звена 3 и, во-вторых, тем, что крутящий момент на блоке 7 при этом превышает крутящий момент, предельно допустимый для муфты. При этом ролик
13991
20, перекатываясь по наклонной поверхности приз(иы 18 и воздействуя на нее, сжимает пружину 19, которая аккумулирует энергию крутящего момента.
Вся система поворачивается на , вокруг центральной оси О, а наличие транслятора кисти 5 удерживает ее в постоянном по отношениюю к горизонтали угловом положении и обеспечивает плоско параллельное движение кисти 5. Вертикальная составляющая S этого движения равна
ei
вб
S 2rsincf sin--- Rsin---,
а горизонтальная составляющая этого движения равна
. . .. 2d „ . oi
incf s in-r- 2 rs in-T-,
где r - длина звена 3.
Отношение горизонтальной h и вер- тикальной S составляюпих, равное
h ot --- tg---, показывает, что при малых
вертикальных перемещениях (достаточ- ных, например, при установке детали в рабочую зону штампа) оно незначиг тельно, т.е. опускание практически вертикально.
После опускания исполнительного органа на заданную величину h осуществляется его остановка или посредством взаимодействия упоров 21 и 22, или непосредственно приводом 2 (после поступления сигнала с ко- мандоаппарата).
Возврат исполнительного органа в исходное положение выполняется приводом 2, который поворачивает звено 3 в противоположном направле- НИИ сначала на угол с/ , а затем посредством муфты предельного крутя
5
0
5
0
0
5
5
щего момента, призма 18 которой под действием аккумулированной при прямом ходе блока 7 энерг-ии пружины 19 вновь возвращает ролик 20 и блок 7 в исходное положение, также на угол об , после чего блок 7 устанавливается неподвижным: и при дальнейшем воздействии привода 2 на звено 3 осуществляется горизонтальное перемещение кисти 5.
Формула изобретения
I: Манипулятор, содержащий основание, многозвенный исполнительный орган, звенья которого последовательно шарнирно соединены между собой и кинематически связаны гибкой передачей, блоки которых расположены иа осях шарниров,, причем первое звено жестко связано с выходным валом привода, установленного на основании, а последнее звено снабжено схватом, отличающийся тем, что, с целью повыщения производительности за счет совмещения за один ход привода горизонтального и вертикального перемещений схвата, он снабжен муфтой предельного крутящего момента, расположенной между основанием и блоком гибкой передачи, установленным на выходном валу привода, причем этот блок имеет по меньшей мере один регулируеьый упор, предназначенный для взаимодействия с первым звеном.
2. Манипулятор по п. 1, о т л и - чающийся тем, что муфта предельного крутящего момента выполнена в виде направляющей, закрепленной на основании, призмы, установленной в этой направляющей подпружиненно и взаимодействующей с дополнительно введенным роликом, жестко связанным с блоком гибкой передачи, установленным на выходном валу привода.
Г 2в
.У-////
.--..-ai , /jl/ /
;/ / /
I i / TQyue.2
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Манипулятор | 1984 |
|
SU1177149A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах. Целью изобретения является nojait- шение производительности за счет сов- мещени: за один ход привода горизонтального и вертикального перемещений схвата. Манипулятор содержит основание I , установленный на нем привод 2 и многозвенный исполнительный орган. Звенья 3 и 4 многозвенного исполнительного органа последовательно шарУб 7 0 нирно соединены между собой и кинематически связаны гибкой передачей. Первое звено 3 шарнирно установлено на основании и жестко связано с выходным валом привода, на котором установлен блок 7, жестко связанный со звеном 3 и гибкой связью, например, тросом 8, - с блоком 9, шарнирно установленным на звене 3, образуя гибкую передачу. Блок 9 жестко связан со звеном 4. Манипулятор имеет муфту предельного крутящего момента, вь полненную в виде закрепленных на основании I направляющих 17, в кото- рык установлена призма 18, прижимаемая с помощью пружины 19 к ролику 20, закрепленному на блоке 7. Для остановки поворачивающегося блока 7 при выполнении вертикального перемещения на нем установлены упоры 21, взаимодействующие с неподвижным упором 22 основания 1. 1 з.п. ф-лы, 2 ил. с в (Л 7 / 20 IS П CPU21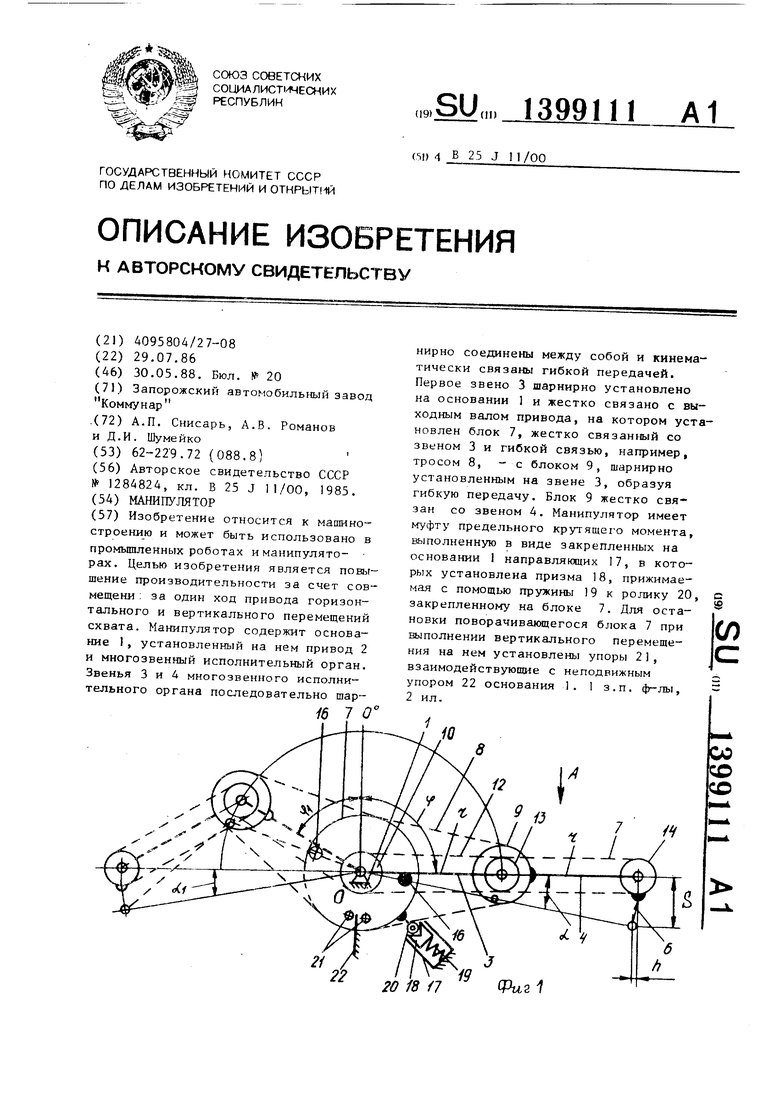
| Манипулятор | 1985 |
|
SU1284824A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
