Изобретение относится к машиностроению и может быть использовано в промышленных роботах. Цель изобретения - улучшение динамических характеристик манипулятора при уменьшении его габаритов, массы и энергоемкости за счет использования дополнительного привода, который через кинематические связи обеспечивает сообш.ение дополнительного крутяш,его момента на ось вращения опоры и перпендикулярную ей ось враш.ения руки во время их перегрузки. Кинематические связи этих осей с валом дополнительного приводного органа могут осуш,ествлять передачу дополнительного крутящего момента на каждую ось в отдельности и на две оси одновременно с возможностью перераспределения крутящего момента на более нагруженную ось. Улучшение динамических характеристик манипулятора достигается за счет того, что дополнительный приводной орган компенсирует не только статистические нагрузки от веса подвижных звеньев, но и инерционные нагрузки, возникающие при изменении скоростей движения этих звеньев, кроме того, он способен автоматически настраиваться и компенсировать статические нагрузки в зависимости от изменяющегося веса полезного груза. Мощность приводов опоры и руки значительно снижаются, так как пиковые нагрузки компенсируются дополнительным приводным органом, кинематически связанным с осями этих звеньев. Снижение приводов позволяет значительно снизить габариты, вес, энергоемкость и стоимость всего манипулятора. На чертеже изображена кинематическая схема манипулятора. Манипулятор содержит опору 1 с приводом 2, установленную на основании 3 и вращающуюся вокруг оси, перпендикулярной основанию. На опоре 1 шарнирно установлена рука 4 с расположенными на ней кистью 5, схватом 6 и приводом 7, шарнирно прикрепленным к опоре 1 и вращающимся вокруг оси, перпендикулярной оси вращения опоры 1 . Манипулятор снабжен дополнительным приводным органом 8, вал которого кинематически связан, например, зубчатой или цепной передачей с конической шестерней 9, аксиально установленной на оси вращения опоры 1, с возможностью их взаимного поворота. Коническая шестерня 9 связана с конической шестерней 10, которая неподвижно закреплена на оси вращения руки 4. Манипулятор работает следующим образом. При вращении руки в момент перегружения ее привода 7 система управления манипулятором по сигналу (например, по возрастанию тока до максимально допустимой величины в силовой обмотке привода) включает дополнительный приводной орган 8, вал которого через кинематическую связь вращает коническую шестерню 9 и связанную с ней коническую шестерню 10, сообщая дополнительный крутящий момент на ось вращения руки 4. При уменьшении нагрузки до допустимых значений дополнительный при водной орган 8 автоматически отключается системой управления. При вращении опоры 1 в момент перегружения ее привода 2 система управления включает дополнительный приводной орган 8, вал которого через кинематическую связь вращает коническую шестерню 9. Если привод 7 остановлен, то шестерня 10, не имея возможности вращаться вокруг собственной оси, играет роль жесткого упора, связанного с вращающейся конической щестерней 9. Эта связь обеспечивает сообщение дополнительного крутящего момента оси вращения опоры 1. привод 2 которой был перегружен. После снижения нагрузки до допускаемых значений система управления отключает дополнительный приводной орган 8. Если перегружаются оба привода 2 и 7,- система управления включает дополнительный приводной орган 8 и происходит автоматическое перераспределение крутящего момента на наиболее нагруженную ось вращения, так как под действием нагрузки эта ось начинает вращаться с меньшей угловой скоростью, чем другая ось вращения, и через кинематические связи передает избыточную нагрузку на дополнительный приводной орган 8, который ее компенсирует. После снижения нагрузок до допустимых значений система управления отключает дополнительный приводной орган 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1530437A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Роботизированный комплекс горячей штамповки | 1988 |
|
SU1613235A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
МАНИПУЛЯТОР, содержащий основаиие, опору с приводом, установленную на основании с возможностью вращения вокруг оси, перпендикулярной основанию, руку, несущую кисть со схватом, и привод ее поворота, установленный на опоре, отличающийся тем, что, с целью улучшения динамических характеристик, он снабжен дополнительным приводом, смонтированным на основании и кинематически связанным с дополнительно введенной конической передачей, ведущее зубчатое колесо которой свободно установлено на опоре, а ведомое коническое колесо жестко закреплено на выходном валу привода поворота руки. (Л ;о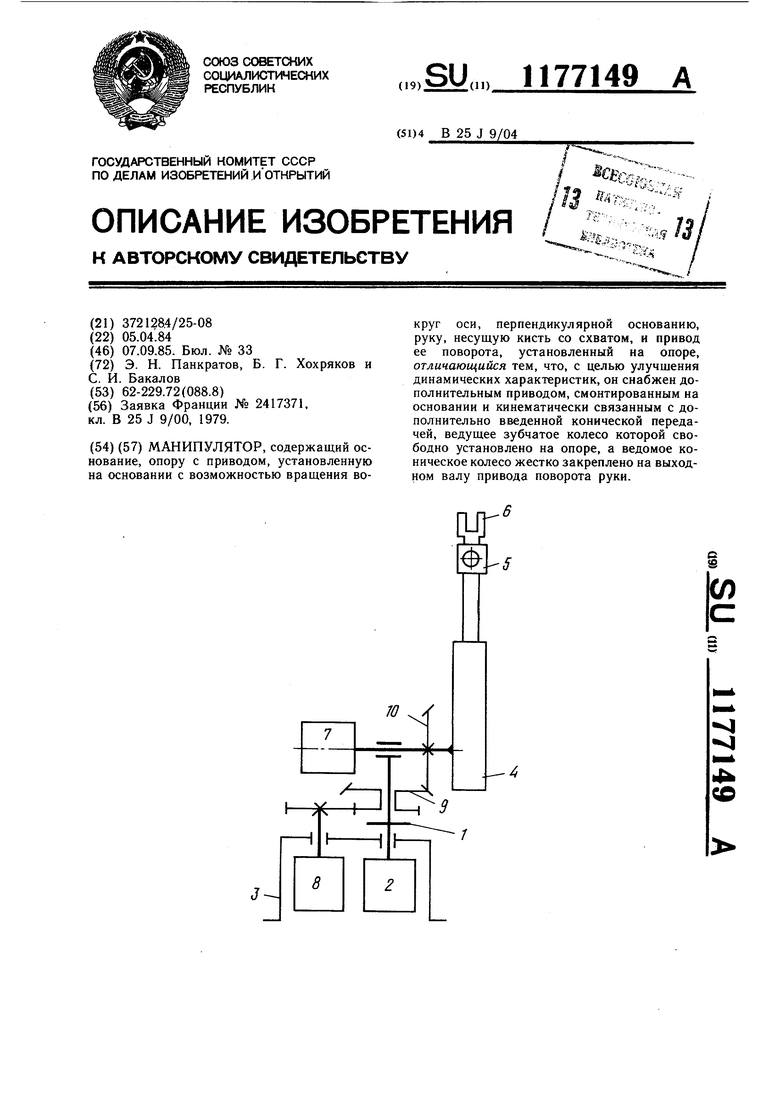
| СПОСОБ ДИАГНОСТИКИ ГЛАУКОМЫ У ЛИЦ С ПРОГРЕССИРУЮЩЕЙ БЛИЗОРУКОСТЬЮ | 2010 |
|
RU2417371C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
