Изобретение относится к магаино- строению и может быть Использовано в промьшшенных работах и манипуляторах .
Цель изобретения - повьппение про- 5
, изводительности и улучшение динамиi ческих характеристик.
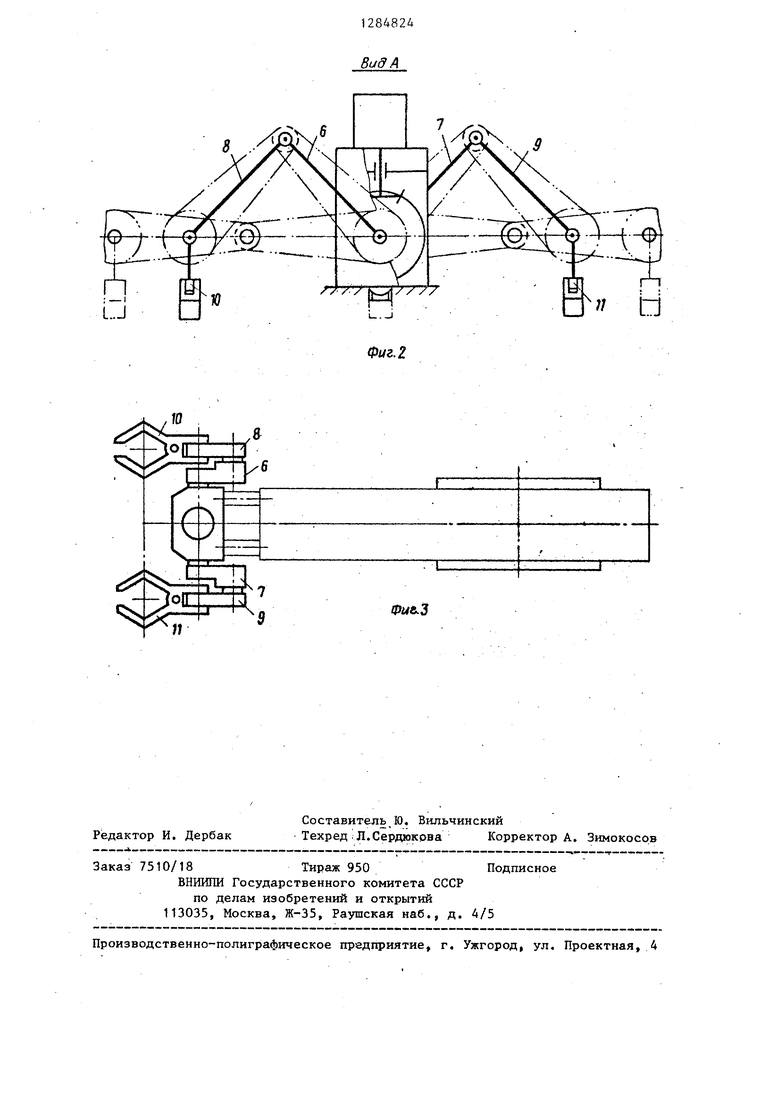
На фиг. 1 показана кинематическая схема манипулятораJ на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вариант ком- О пановки манипулятора.
Манипулятор состоит из двух аналогичных многозвенных исполнительных органов и имеет основание 1, на кото ром закреплен привод 2, на выходном звене которого жестко закреплено коническое зубчатое колесо 3, входящее в зацепление с коническими зубчатыми колесами 4 и 5, жестко закреп- ленньми на соосных валах nep Bbtx зве-
.-30
35
ньев 6 и 7. На последних шарнирно .установлены последующие звенья 8 и 9, на которых также шарнирно установлены захваты 10 и 11. Звенья 6,8 и 7,9 исполнительных органов манипулятора связаны с общим основанием 1 и с захватами 10 и 11 цепными передачами с передаточным отношением и ii 2:1. Передачи с i состоят из звездочек 12 и 13, неподвижно закреп .ленных на основании 1 и соединенных цепями 14 и 15 со звездочками 16 и 17, жестко закрепленных на звеньях 9 и 8. Число зубьев звездочек 12 и 13 вдвое больше числа зубвев звездочек 16 и 17 соответственно. Передачи с if состоят из звездочек 18 и 19, закрепленньк на звеньях 6 и 7 и соединенных цепями 20 и 21 со звездочками 22 и 23 сортветственно, при- .чем звездочки 22 и 23 жестко соеди- нены с захватами 10 и 11. Число зубьев звездочек 18 и 19 вдвое меньше числа зубьев звездочек 22 и 23.
45
Манипулятор работает следующим
образом.
При враш;ении вала привода 2 кони- ческое зубчатое колесо 3 вращает в противоположных направлениях кони- 50 ческие зубчатые колеса 4 и 5, а вместе с ними.звенья 6 и 7, которые, вращаясь относительно общего основания 1 и жестко закрепленных на нем звездочек 12 и 13, приводят во вра1284824 2
щение 1ерез цепи 14 и 15 звездочки 16 и 17 и жестко связанные с ними звенья 8 и 9. Благодаря передаточному отнош.ению ijf 1:2 поворот звеньев 8 и 9 происходит с угловой скоростью, вдвое большей угловой скорости поворота звеньев 6 и 7, и в направлении, противоположном их вращению. Вращение звеньев 6 и 7 с жестко установленными на них звездочками 18 и 19 через цепи 20 и 21 вызывает вращение звездочек 22 и 23 вместе с жестко связанными с ними захватами 10 и 11, причем, благодаря передаточному отношению ij 2:1 угловые скорости звеньев 6 и 7 и захватов 10 и 11 равны, а направление их вращения совпадает. Благодаря таким взаимным перемещениям всех элементов манипулятора и их кинематическим связям захваты 10 и 11 сохраняют постоянное угловое положение относительно общего основания 1, 2 двигаются прямолинейно и в противоположных направлениях.
«5
Формула изобретения
Манипулятор, содержащий основание, многозвенньй исполнительный орган, звенья которого расположены последовательно, шарнирно сочленены и кине- матически связаны между собой, при- чем последнее звено снабжено захва- Том, а первое имеет жестко связанный с ним вал для кинематической связи с установленным на основании приводом, отличающийся тем, что, с целью повьш1ения производительности и улучшения динамических характеристик, он снабжен дополнительным исполнительным органом, аналогичным основному и смонтиро- - ванным шарнирно на основании так, что валы первых звеньев каждого исполнительного органа расположены соосно, причем на каждом из указанных валов закреплены дополнительно одинаковые конические зубчатые колеса, а на выходном звене привода также закреплено коническое зубчатое колесо, которое находится в зацеплении с указанными зубчатыми колесами.
30
35
45
50 Формула изобретения
Манипулятор, содержащий основание, многозвенньй исполнительный орган, звенья которого расположены последовательно, шарнирно сочленены и кине- матически связаны между собой, при- чем последнее звено снабжено захва- Том, а первое имеет жестко связанный с ним вал для кинематической связи с установленным на основании приводом, отличающийся тем, что, с целью повьш1ения производительности и улучшения динамических характеристик, он снабжен дополнительным исполнительным органом, аналогичным основному и смонтиро- - ванным шарнирно на основании так, что валы первых звеньев каждого исполнительного органа расположены соосно, причем на каждом из указанных валов закреплены дополнительно одинаковые конические зубчатые колеса, а на выходном звене привода также закреплено коническое зубчатое колесо, которое находится в зацеплении с указанными зубчатыми колесами.
Вид А
VaN
ev.-. J
a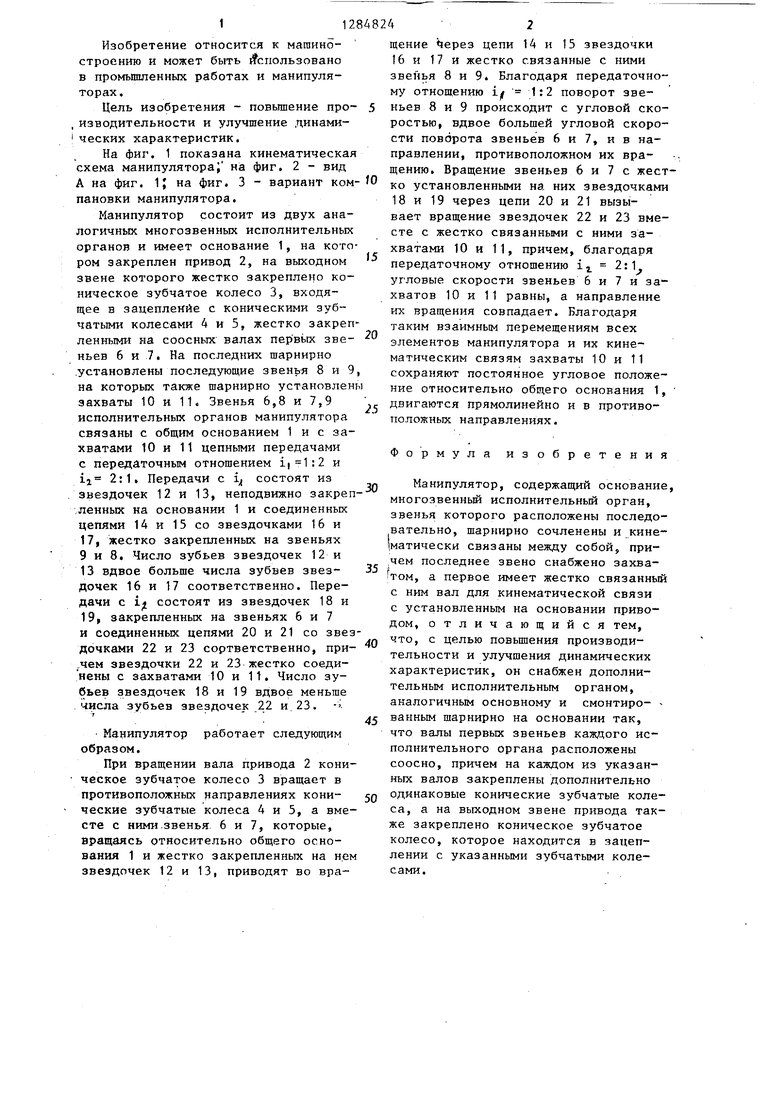
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1977 |
|
SU659376A1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Промышленный робот | 1988 |
|
SU1563967A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| ОЧИСТНОЙ КОМБАЙН ДЛЯ ТОНКИХ ПЛАСТОВ УГЛЯ | 1989 |
|
RU2016194C1 |
Изобретение может быть использовано в промышленных роботах и манипуляторах. Цель изобретения состоит в повышении грузоподъемности и улучшении динамических характеристик манипулятора за счет взаимной кинематической связи двух исполнительных органов и одного общего привода. При вращении вала привода 2 коническая шестерня 3 вращает в противоположных направлениях конические шестерни 4 и 5, а вместе с ними звенья 6 и 7, которые, вращаясь относительно общего основания 1 и жестко закрепленных на нем звездочек 12 и 13, приводят во вращение через приводг ные цепи 14 и 15 звездочки 16 и 17 и жестко связанные с ними звенья 8 и 9. Благодаря передаточному отношению ускоряющих ступеней i. 1:2 вращение звеньев В и 9 происходит с угловой скоростью, вдвое большей угловой скорости звеньев 6 и 7, ив направлении, противоположном их вращению. Вращение звеньев 6 и 7 с жестко установленными на них звездочками 18 и 19 через приводные цепи 20 и 21 вызывает вращение звездочек 22 и .23 вместе с жестко связанными с ними захватами 10 и 11, причем благодаря передаточному отношению последних ступеней 1 2:1 угловые скорости звеньев 6 и 7 и захватов 10 и 11 равны, а направление их вращения совпадает. Благодаря Таким взаимньтм перемещениям всех элементов манипулятора- и их кинематическим связям захваты 10 и 11 сохраняют постоянное угловое положение относительно общего основания 1, двига- ются прямолинейно ив противоположных направлениях. 3 ил. 1чЭ Д Я Ю 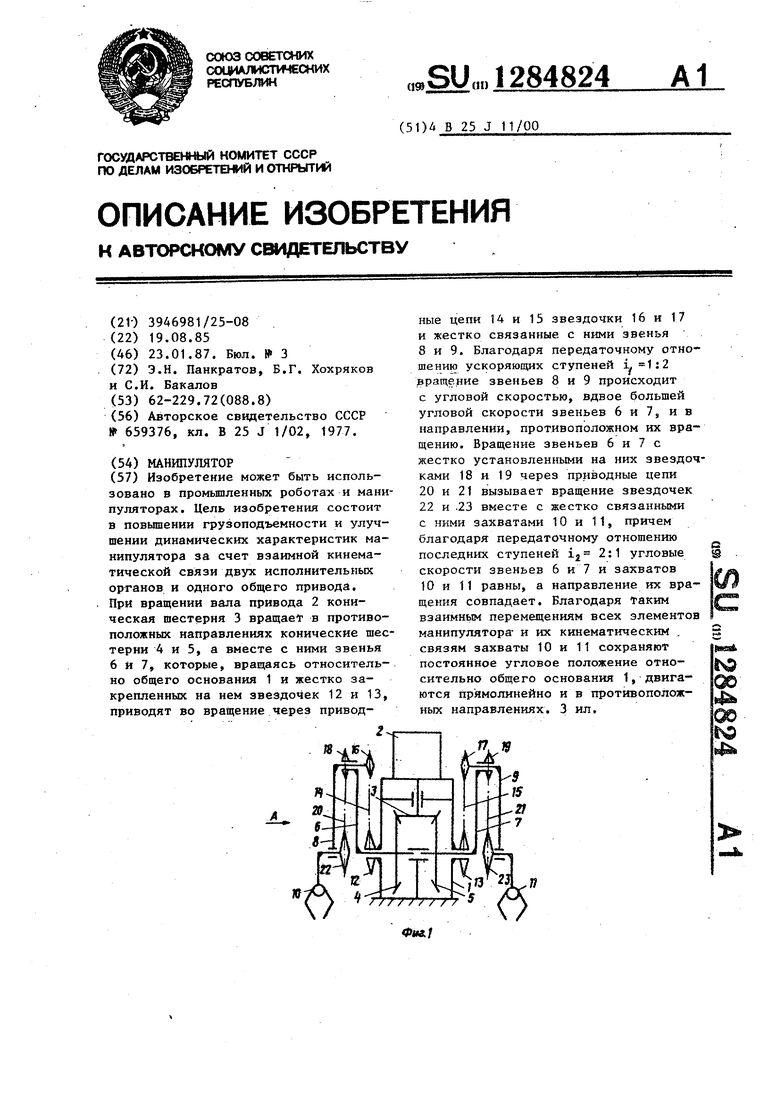
v 3
L
Фий.3
Редактор И, Дербак
Составитель Ю. Вильчинский
Техредi Л. Сердюкова Корректор А. Зимокосов
Заказ 7510/18Тираж 950Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1977 |
|
SU659376A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
