Изобретение относится к измерительной технике, а именно к тензо- метрическим инструментам движителей
вой тандем-дифференциальной схеме та ким образом, что в одном плече полумоста установлены тензодатчики 22 и
реечного типа бесцепных-систем подачи 25, а в другом - 23 и 24. На гранях
15
на фиг. фиг. 8
20
очистных комбайнов.
Целью изобретения является повышение точности измерения усилий в зацеплении движителей и определения точки их приложения.fO
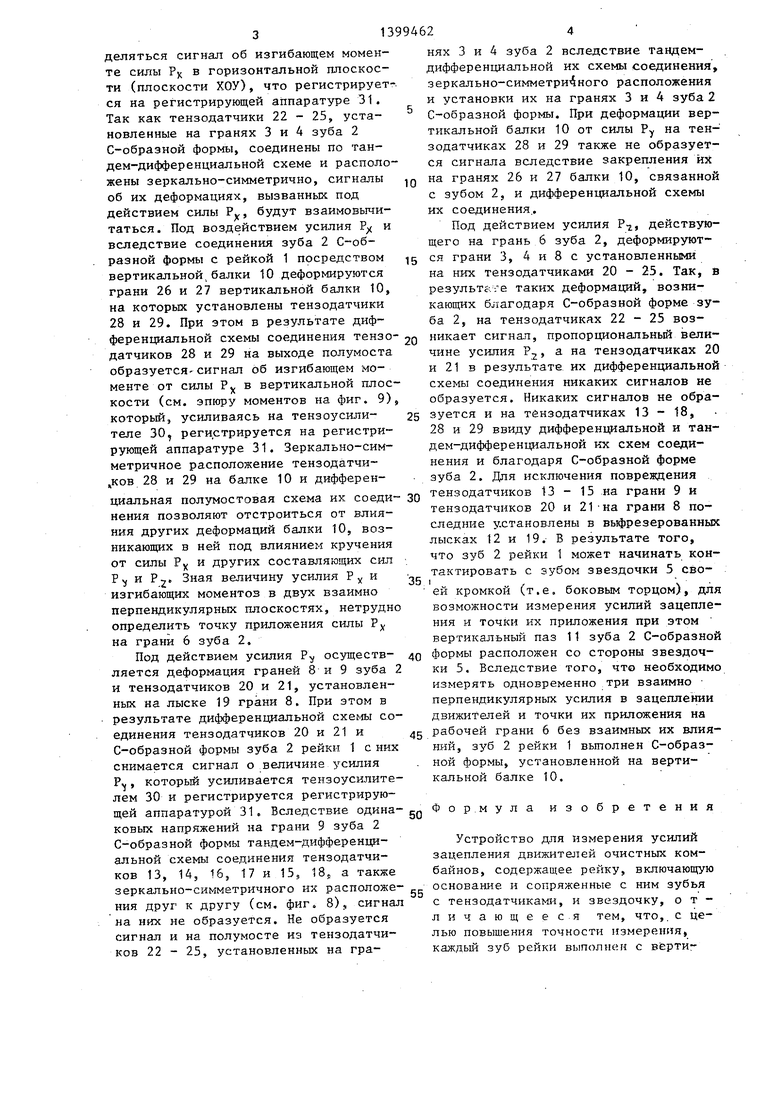
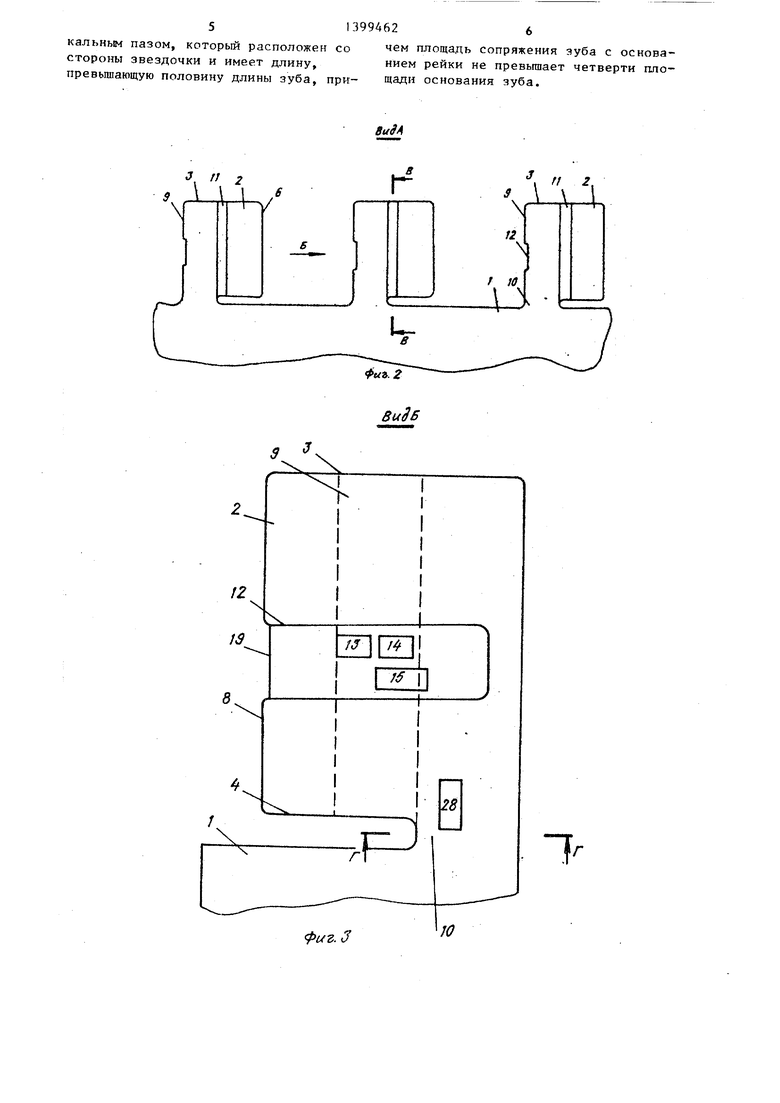
На фиг. 1 изображено устройство для измерения усилий зацепления движителей очистных комбайнов; на фиг.2- вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на
(
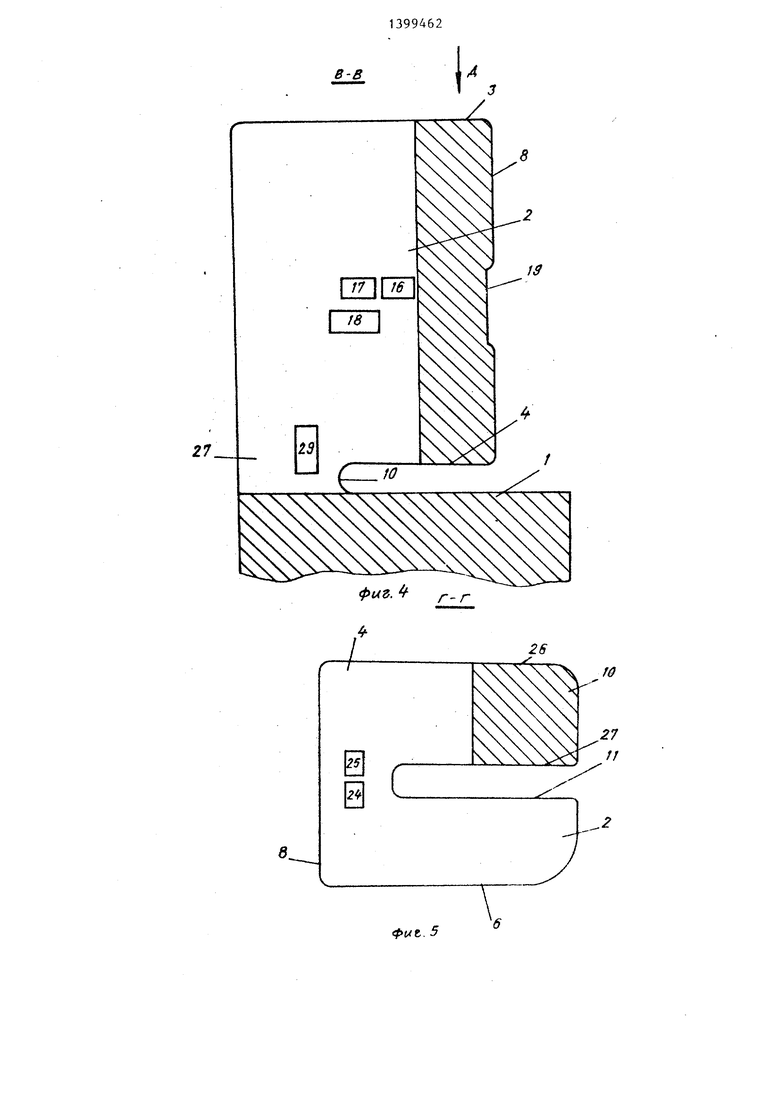
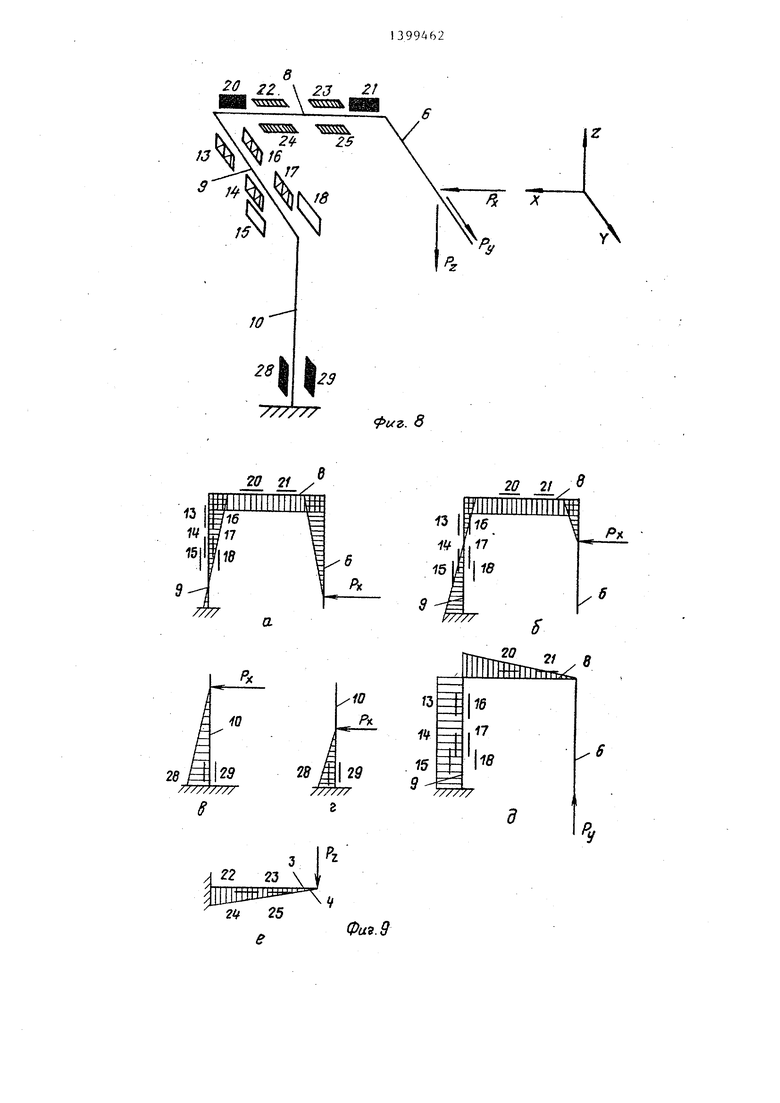
фиг. 3; на фиг.6 - вид Д на фиг. 4; 7 - вид Е на фиг, 6; па - структурно-кинематическая схема зуба рейки; на фиг 9 - эпюры
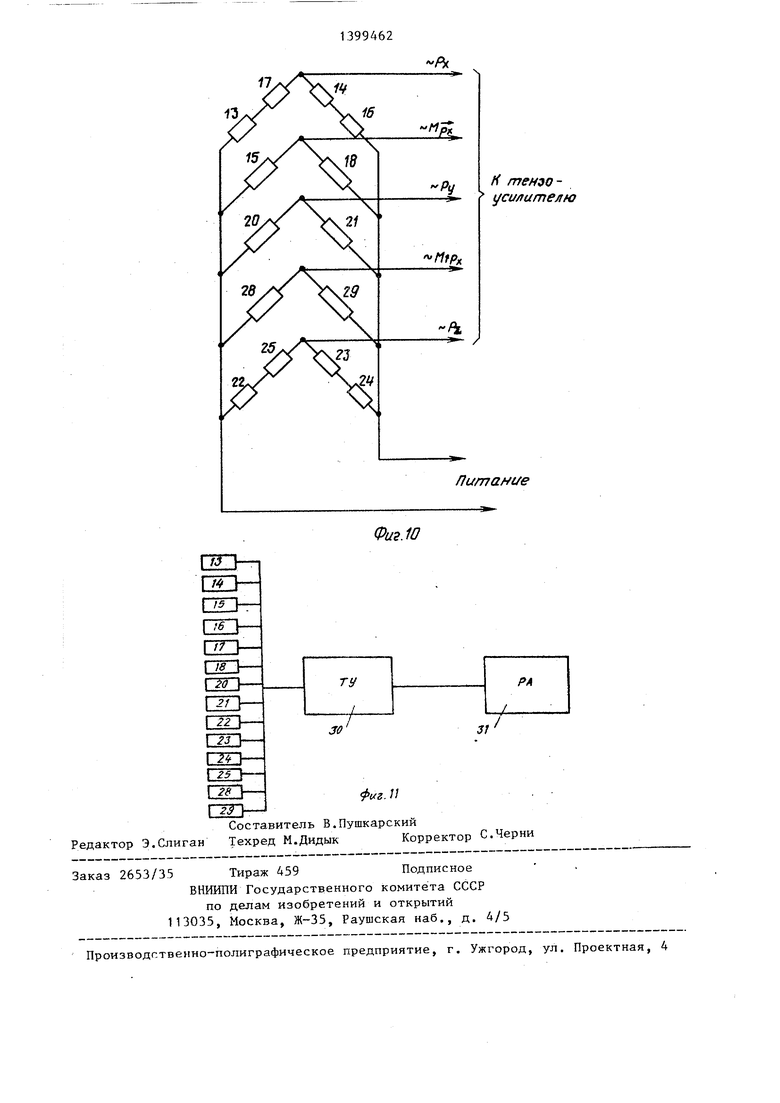
изгибающих моментов от -составляющих усилий зацепления; на фиг, 10 - схема соединений тензодатчиков устройства; на фиг. 11 - блок-схема устрой:етва.
Устройство для измерения усилия зацепления двргжителей очистных комбайнов состоит из рейки 1 с зубьями 2« выполненными С-образной. формы с гранями 3 и 4, расположенньн и в плоскости установки звездочки 5, рабочей грани 6, взаимодействующей с зубом 7 звездочки 5 и двух взаимно пересекав :щихся граней 8 и 9„ Зуб 2 установлен на рейке 1 посредством вертикальной
25
30
35
26 и 27 вертикальной балки 10 зеркально-симметрично установлены тенз датчики 28 и 29, которые соединены по полумостовой дифференциальной сх ме. Тензодатчики 13 - 18, 20 - 22,2 25, 28 и 29 посредством усилителей связаны с регистрирующей аппарату, рой 31.
Устройство для измерения усилий зацепления движителей очистных комба нов работает следующим образом.
При взаимодействии зуба 7 звездо ки 5 с зубом 2 рейки 1 на рабочую его грань 6 воздействуют усилия зацепления, которые можно разложить н три взаимно перпендикулярные состав ляющие силы Р, Ру и Н, Для удобств
рассмотрим действие каждой составляющей силы на зуб 2 раздельно.
Под воздействием усилия Р на грань 6 зуба 2 осуществляется дефор мация граней 6, 8 и 9 вместе с закрепленными на них тензодатчиками 13 18, 20 и 21 пропорционально на пряжениям, возникающим в них (как указано на эпюре моментов, см, фиг. При этом вследствие дифференциальной схемы установки теизодатчиков и в результате того, что на грани 8 изгибающий момент постоянен по всей ее длине, и за счет С-образной форм зуба 2 разностного сигнала между те зодатчиками 20 и 21 не будет, а на регистрирующей аппаратуре 31 появит ся усиленньш тензоусилителем 30 сиг нал лишь от тензодатчиков 13, 14, 1 и 17;, пропорциональный их деформаци ям от yci-шия РХ. Так как соединение тензодатчиков 13, 14, 16 и 17 осущ ствлено по .тандем-диффереидаальной схеме (см, фиг. 10), то на разность сигнала, снимаемого с них, не будет влиять точка приложения усилия Р н грани 6 зуба 2, Тандем-дифференциал ная полумостовая схема соединения тензодатчиков позволяет складывать сигналы, полученные посредством тен зодатчиков, находящихся, в одном плече, и вычитать сигналы одного плеча из другого. Дифференциальная полумостовая схема соединена тензодатчиков позволяет вычитать сигналы одного плеча полумоста из другого. На тензодатчиках 15 и 18 будет выбалки 10, связанной с торцом грани 9 таким образом, что вертикальный паз 11 для образования С-образной формы зуба 2 рейки 1 расположен со стороны звездочки 5. На лыске 12 грани 9 параллельно граням 3 и 4 установлены тензодатчики 13 15, электрически связанные с теызодатчиками 16 - 18 которые установлены вертикально и симметрично им. Тензодатчики 13 -- 17 соединены по полумостовой тандем-диф ферендиальной схеме таким образом, что в одном плече полумоста установ-- лены тензодатчики 13 и 17, а в другом - 14 и 16, Тензодатчики 15 и 18 соединены по полумостовой дифференциальной схеме. На лыске 19 грани 8 параллельно граням 3 и 4 установлены тензодатчики 20 и 21, связанные по полумостовой дифференциальной схеме,, На гранях 3 и 4 зеркально-симметрично установлены тензодатчики 22 - 25,, расположенные параллельно грани 8 и связанные между собой по полумостовой тандем-дифференциальной схеме таким образом, что в одном плече полумоста установлены тензодатчики 22 и
25, а в другом - 23 и 24. На гранях
5
0
O
5
0
5
0
5
0
5
26 и 27 вертикальной балки 10 зеркально-симметрично установлены тензодатчики 28 и 29, которые соединены по полумостовой дифференциальной схеме. Тензодатчики 13 - 18, 20 - 22,24, 25, 28 и 29 посредством усилителей 30 связаны с регистрирующей аппарату,- рой 31.
Устройство для измерения усилий зацепления движителей очистных комбайнов работает следующим образом.
При взаимодействии зуба 7 звездочки 5 с зубом 2 рейки 1 на рабочую его грань 6 воздействуют усилия зацепления, которые можно разложить на три взаимно перпендикулярные составляющие силы Р, Ру и Н, Для удобства
рассмотрим действие каждой составляющей силы на зуб 2 раздельно.
Под воздействием усилия Р на грань 6 зуба 2 осуществляется деформация граней 6, 8 и 9 вместе с закрепленными на них тензодатчиками 13 18, 20 и 21 пропорционально напряжениям, возникающим в них (как указано на эпюре моментов, см, фиг.9). При этом вследствие дифференциальной схемы установки теизодатчиков и в результате того, что на грани 8 изгибающий момент постоянен по всей ее длине, и за счет С-образной формы зуба 2 разностного сигнала между тензодатчиками 20 и 21 не будет, а на регистрирующей аппаратуре 31 появится усиленньш тензоусилителем 30 сигнал лишь от тензодатчиков 13, 14, 16 и 17;, пропорциональный их деформациям от yci-шия РХ. Так как соединение тензодатчиков 13, 14, 16 и 17 осуществлено по .тандем-диффереидаальной схеме (см, фиг. 10), то на разность сигнала, снимаемого с них, не будет влиять точка приложения усилия Р на грани 6 зуба 2, Тандем-дифференциальная полумостовая схема соединения тензодатчиков позволяет складывать сигналы, полученные посредством тензодатчиков, находящихся, в одном плече, и вычитать сигналы одного плеча из другого. Дифференциальная полумостовая схема соединена тензодатчиков позволяет вычитать сигналы одного плеча полумоста из другого. На тензодатчиках 15 и 18 будет выделиться сигнал об изгибающем моменте силы Pj в горизонтальной плоскости (плоскости ХОУ), что регистрирует-. ся на регистрирующей аппаратуре 31. Так как тензодатчики 22 25, установленные на гранях 3 и 4 зуба 2 С-образной формы, соединены по тандем-дифференциальной схеме и расположены зеркально-симметрично, сигналы об их деформациях, вызванных под действием силы Р, будут взаимовычи- таться. Под воздействием усилия Рр и вследствие соединения зуба 2 С-образной формы с рейкой 1 посредством вертикальной,балки 10 деформируются грани 26 и 27 вертикальной балки 10, на которых установлены тензодатчики 28 и 29. При этом в результате дифнях 3 и 4 зуба 2 вследствие тандем- дифференциальной их схемы соединения, зеркально-симметричного расположения и установки их на гранях 3 и 4 зуба 2 С-образной формы. При деформации вертикальной балки 10 от силы Ру на тен- зодатчиках 28 и 29 также не образуется сигнала вследствие закрепления их Q на гранях 26 и 27 балки 10, связанной с зубом 2, и дифференциальной схемы их соединения.
Под действием усилия Р, действующего на грань 6 зуба 2, деформируютс установленными
25
5 ся грани 3, 4 и 8
на них тензодатчиками 20 - 25. Так, в результате таких деформаций, возникающих благодаря С-образной форме зуба 2, на тензодатчиках 22 - 25 воз- ференциальной схемы соединения тензо- 2Q никает сигнал, пропорциональный вели- датчиков 28 и 29 на выходе полумоста чине усилия Р, а на тензодатчиках 20 образуется-сигнал об изгибающем моменте от силы Р, в вертикальной плоскости (см. эпюру моментов на фиг. 9), который, усиливаясь на тензоусили- теле 30, регистрируется на регистрирующей аппаратуре 31. Зеркально-симметричное расположение тензодатчи- ,ков 28 и 29 на балке 10 и дифференциальная ползгмостовая схема их соеди- 30 тензодатчиков 13-15 на грани 9 и
тензодатчиков 20 и 21-на грани 8 последние установлены в вь5фреэерованных лысках 12 и 19. В результате того, что зуб 2 рейки 1 может начинать контактировать с зубом звездочки 5 своей кромкой (т.е. боковым торцом), для возможности измерения усилий зацепления и точки их приложения при этом вертикальный паз 11 зуба 2 С-образной 40
и 21 в результате их дифференциальной схемы соединения никаких сигналов не образуется. Никаких сигналов не образуется и на тензодатчиках 13-18, 28 и 29 ввиду дифференциальной и тандем-дифференциальной кк схем соединения и благодаря С-образной форме зуба 2. Дня исключения повреждения
нения позволяют отстроиться от влияния других деформаций балки 10, возникающих в ней под влиянием кручения от силы Ру и других составляющих сил
Р,, и
Зная величину усилия Р.
и
изгибающих моментов в двух взаимно перпендикулярных плоскостях, нетрудно определить точку приложения силы 7
35
на грани 6 зуба 2.
Под действием усилия осуществляется деформация граней 8 и 9 зуба 2 и тензодатчиков 20 и 21, установленных на лыске 19 грани 8. При этом в результате дифференциальной схемы соединения тензодатчиков 20 и 21 и С-образной формы зуба 2 рейки 1 с них снимается сигнал о величине усилия Р, который усиливается тензоусилите- лем 30 и регистрируется регистрирующей аппаратурой 31. Вследствие едина- gQ ковых напряжений на грани 9 зуба 2 С-образной формы тандем-дифференциальной схемы соединения тензодатчиков 13, 14, 16, 17 и 15j 18s а также
формы расположен со стороны звездочки 5. Вследствие того, что необходимо измерять одновременно три взаимно перпендикулярных усилия в зацеплении движителей и точки их приложения на 45 рабочей грани 6 без взаимных их влияний, зуб 2 рейки 1 вьтолнен С-обрав- . ной формы, установленной на вертикальной балке 10.
Формула изобретения
Устройство для Измерения усилий зацепления движителей очистных комбайнов, содержащее рейку, включающую зеркально-симметричного их расположе- с основание и сопряженные с ним зубья ния друг к другу (см. фиг. 8)., сигнал с тензодатчиками, и звездочку, о т - на них не образуется. Не образуется л и чающееся тем, что,, с це
4624
нях 3 и 4 зуба 2 вследствие тандем- дифференциальной их схемы соединения, зеркально-симметричного расположения и установки их на гранях 3 и 4 зуба 2 С-образной формы. При деформации вертикальной балки 10 от силы Ру на тен- зодатчиках 28 и 29 также не образуется сигнала вследствие закрепления их на гранях 26 и 27 балки 10, связанной с зубом 2, и дифференциальной схемы их соединения.
Под действием усилия Р, действующего на грань 6 зуба 2, деформируютс установленными
ся грани 3, 4 и 8
на них тензодатчиками 20 - 25. Так, в результате таких деформаций, возникающих благодаря С-образной форме зуба 2, на тензодатчиках 22 - 25 воз- никает сигнал, пропорциональный вели- чине усилия Р, а на тензодатчиках 20 тензодатчиков 13-15 на грани 9 и
и 21 в результате их дифференциальной схемы соединения никаких сигналов не образуется. Никаких сигналов не образуется и на тензодатчиках 13-18, 28 и 29 ввиду дифференциальной и тандем-дифференциальной кк схем соединения и благодаря С-образной форме зуба 2. Дня исключения повреждения
40
и
35
тензодатчиков 20 и 21-на грани 8 последние установлены в вь5фреэерованных лысках 12 и 19. В результате того, что зуб 2 рейки 1 может начинать контактировать с зубом звездочки 5 своей кромкой (т.е. боковым торцом), для возможности измерения усилий зацепления и точки их приложения при этом вертикальный паз 11 зуба 2 С-образной 0
Q
формы расположен со стороны звездочки 5. Вследствие того, что необходимо измерять одновременно три взаимно перпендикулярных усилия в зацеплении движителей и точки их приложения на 5 рабочей грани 6 без взаимных их влияний, зуб 2 рейки 1 вьтолнен С-обрав- . ной формы, установленной на вертикальной балке 10.
Формула изобретения
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования параметров бесцепной системы подачи угольного комбайна | 1988 |
|
SU1604989A1 |
| Устройство для измерения вибраций узлов выемочного комбайна | 1990 |
|
SU1774010A1 |
| Стенд для исследования горных машин | 1986 |
|
SU1384747A1 |
| ДИНАМОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ | 1972 |
|
SU329419A1 |
| Стенд для измерения сопротивления грунтов резанию | 1977 |
|
SU734514A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ИЗГИБА БАЛКИ ПОСТОЯННОГО СЕЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526787C2 |
| Устройство для измерения крутящего момента установки с двигателем и потребителем | 1984 |
|
SU1247713A1 |
| Устройство для управления горной машиной | 1983 |
|
SU1116158A1 |
| ДИНАМОМЕТР ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА КИСТИ | 1995 |
|
RU2108748C1 |
| Механизм подачи очистного комбайна | 1986 |
|
SU1411464A1 |
Изобретение относится к измерительной технике Цель изобретения - повьшение точности измерения усилий в зацеплении движителей и определение точки их приложения. Устр-во для изг: мерения усилий зацепления движителей очистных комбайнов включает рейку 1 с зубьями 2, на которых размещены тензодатчики, и звездочку 5. Каждый зуб 2 вьтолнен.с вертикальным пазом 11 для образования С-образной формы зуба 2. Располо:|сен паз 11 со стороны звездочки 5 и имеет длину, превьппающую половину длины зуба 2. При взаимодействии зуба звездочки с зубом 2 рейки 1 на рабочую грань зуба 2 воздействуют усилия зацепления, которые можно разложить на три взаимно перпендикулярные составляющие силы. Последние воспринимаются тензо- датчиками, установленными на гранях зуба 2. Площадь сопряжения зуба 2 с основанием рейки не превышает четверти площади основания зуба, 11 ил. § О) со со со 4;: О5 to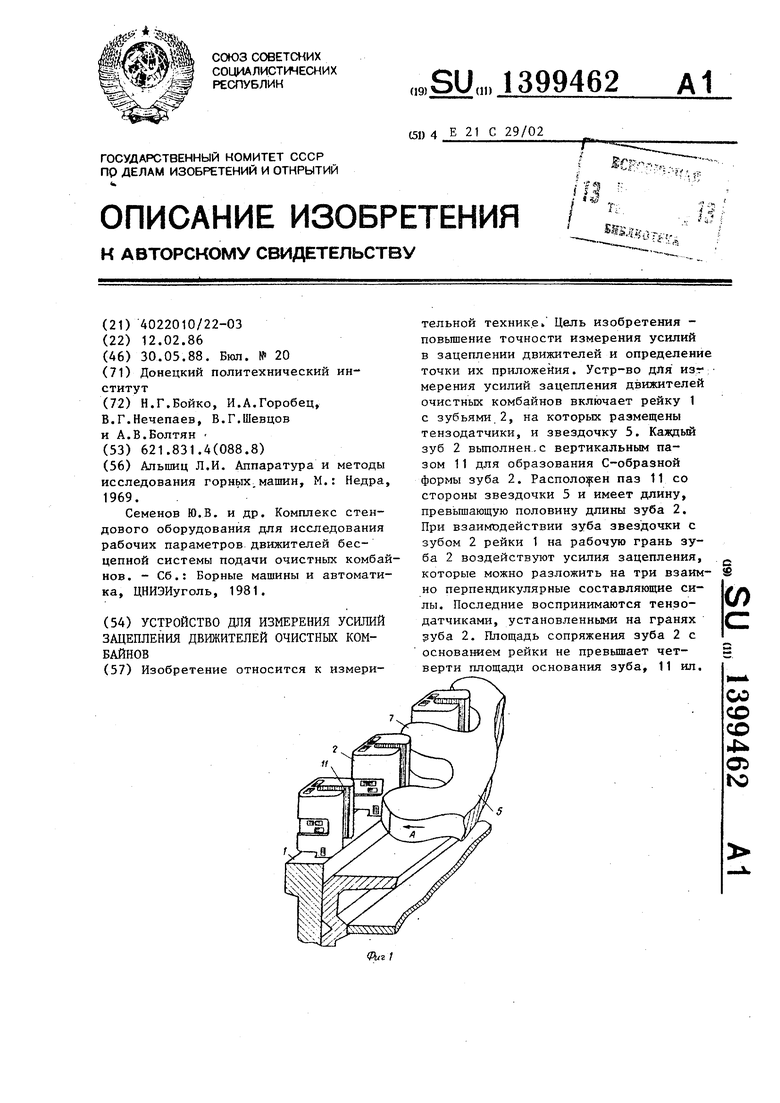
сигнал и на полумосте из тензодатчиков 22 - 25, установленных на гралью повышения точности измерения, каждый зуб рейки выполнен с вЬрти513994626
кальным пазом, который расположен со чем площадь сопряжения зуба с основа- стороны звездочки и имеет длину, нием рейки не превьппает четверти пло- превьтающую половину длины зуба, при- щади основания зуба.
фиг. J
1
Г
В-В
. 5
/
х
Z2
.Л инази а
. 6
8 J
ff
ВчЗ
X
8
Фиг. 7
в
2J
ЧЧУУЧЧУУ
ViyvVS WCvV
25 16
J7
28
Ц23
/////у
20 21
В
i-X
фиг. 8
20 21
в
П
О
30
Составитель В.Пушкарский Редактор Э.Слиган Техред М.Дидык Корректор С.Черни
Заказ 2653/35 Тираж 459Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Л тенуо- усилителю
Питание
Фи.Ю
J/
. //
| Альшиц Л.И | |||
| Аппаратура и методы исследования горных,машин, М.: Недра, 1969 | |||
| Семенов Ю.В | |||
| и др | |||
| Комплекс стендового оборудования для исследования рабочих параметров движителей бесцепной системы подачи очистных комбайнов | |||
| -Сб.: Борные машины и автоматика, ЦНИЭИуголь, 1981. |
