Известны автоматы для передачи кирпича-сырца с вы.дающего кирпич транспортера резательного станка на полки люлечного конвейера, расположенного параллельно с транспортером и движущегося в одном с ним направлении. Для сталкивания кирпича с транспортера на люльки применяется движущийся возвратно-поступательно и в поперечном направлении толкатель.
Однако в известных автоматах из-за отсутствия синхронности в работе с конвейером все же приходится затрачивать некоторое количество ручного труда для перекладки части кирпича-сырца.
В предложенном автомате толкатель установлен на каретке, движущейся возвратно-поступательно и в поперечном направлении и приводимой в движение от конвейера посредством ловителя. Ловитель установлен на каретке и взаимодействует с подвесками люлечного конвейера. На каретке под транспортером установлен поперечный упор. Ловитель выполнен поворотным и удерживается подвижными фиксаторами, которые управляются неподвижным конечным выключателем-упором. В автомате применены также контргрузы, присоединенные к толкателю тросами, перекинутыми через блоки, которые установлены на каретке. К каретке тросы перекинуты через блоки, установлены на станине автомата. Предложенная конструкция автомата обеспечивает работу автомата синхронной с движением люлек люлечного конвейера независимо от величин шага между люльками и изменения скорости люлечного конвейера. Помимо этого, автомат позволяет высвободить 2-3 рабочих тяжелой профессии отхватчиц и улучшить качество продукции за счет ликвидации ручной отхватки и повысить производительность пресса.
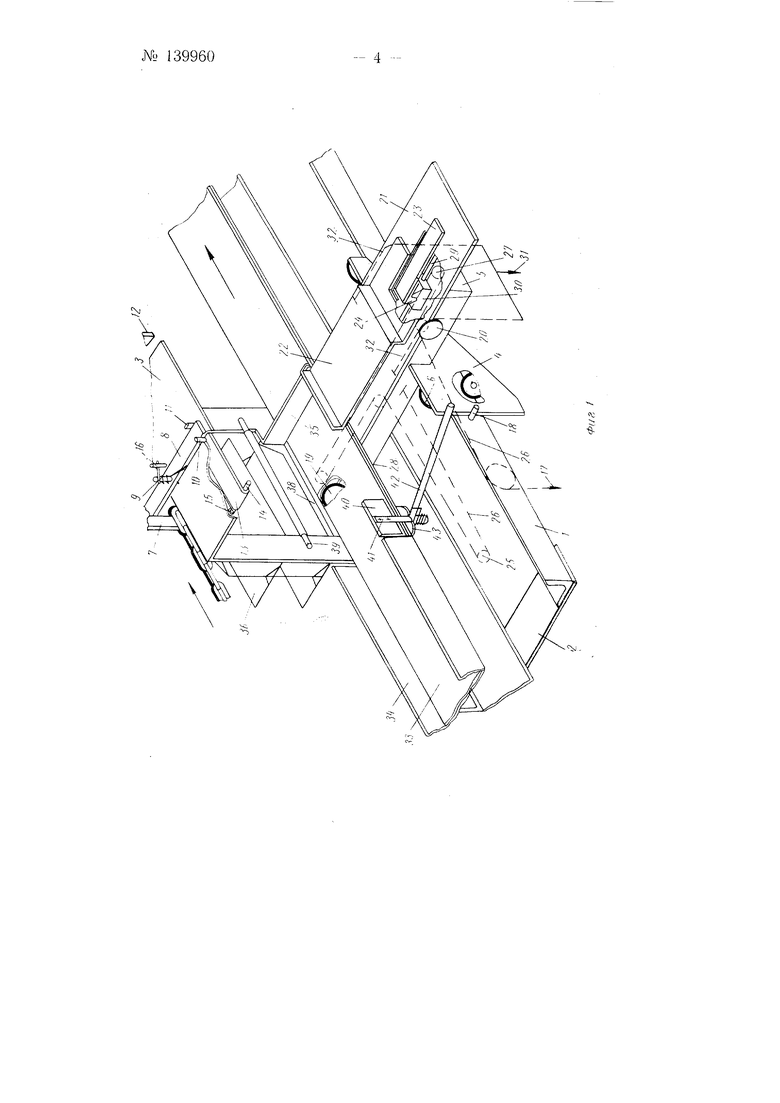
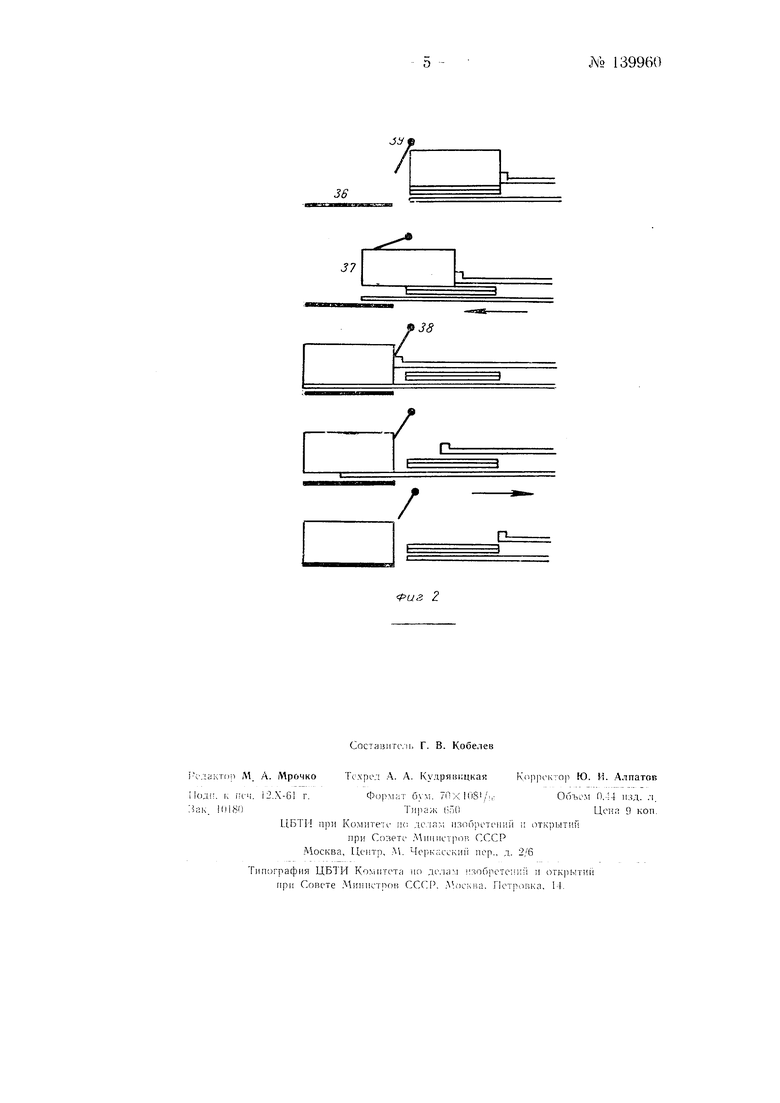
На фиг. 1 схематически изображен предложенный автомат; на фиг. 2 - схема сдвижки кирпича с транспортера на полку люльки конвейера.
№ 139960 2
Основанием автомата рама, состоящая нз двух направляющих /, соединенных между собой перемычками 2. По направляющим передвигается каретка, состоящая из передней 3 и задней 4 щек, соединенных между собой рамой 5. На каждой из щек закреплено по три несущих ролика 6, rlepeмeщaюпJ,иxcя по направляющим. Перемещение каретки осуществляется синхронно с работой люлечного конвейера, параллельно его оси. На пути подвески 7 ролика люлечного конвейера находится уловитель 8. По мере движения люлечного конвейера подвеска упрется в уловитель и потянет его с собой. Уловитель состоит из пластины, имеющей возможность поворачиваться на оси 9 в горизонтальной плоскости. На одном конце уловитель прижат гюдвеской 7, а на другом конце находится между двумя фиксаторами 10 и //. Зажатый фиксаторами уловитель не сможет вращаться вокруг оси .9 и будет перемещаться вместе с кареткой за подвеской люлечного конвейера до теч (юр, пока фиксатор пе упрется в упор 12. Фиксаторы закреплены пн планке 13, имеющей возможность поворачиваться вокруг оси 14. Сама планка постоянно прижимается пружиной 15 к щеке 3 и фиксаторами держит уловитель в запертом состоянии. Имея срез в сторону упора, фиксатор 11, дойдя до него, утонится в щеке 3, а связанный с ним фиксатор 10 войдет в отверстие щеки и отопрет уловитель 8. Уловитель по i действием подвески 7 повернется вокруг оси 9 и освободит ее, после чего движение каретки остановится. После прохода подвески уловитель под действием пружины 6 вернется в исходное положение, а каретка под действием груза 17 через систему блоков и троса, закрепленных на )ам1 и на каретке, также встанет в первоначальное положение, упираясь в ограничитель 18 до тюдхода очередной люльки конвейера. Кроме И1ести несущих роликов 6 на каретке имеются четыре направляющих ролика 19 и 20, по которым перемещается нижняя площадка 21 сбрасывате;1я кирпича. Верхняя площадка 22 сбрасывателя соединена с нижпсй болтами, плоской пружиной 23 и замком 24. Сбрасыватель перемещается перпендикулярно оси движения люлечпого конвейера. Система блоков, по которым проходит трос с грузом для возврата каретки в исходное положение, устроена так, что благодаря наличию блока 25 трос 26 пмеет скорость, вдвое превыщаюптую скорость каретки. Внутри каретки, параллельно тросу между блоками 27 и 28 находится направляюп1ая 29, МО которой перемещается закреплеппый па тросе замок 30, имеющий возможность сцепляться с замком 24 сбрасывателя. Двпжсние сбрасывателя ограничивает упор, раскрывающий замок. Для возврапденпл сбрасывателя в первоначальное положение применен груз 31, воздействующий на сбрасыватель через трос 32 и направляющий ролик 20.
Кирпич по транспортеру 33 в направляющих 34 движется до упора 35, закренлеппого на щеке 3. Как только люлька конвейера подо11.ает к упору 35, подвеска 7 поведет за собой каретку. Одновремепно приход;гг в движение сбрасыватель, продвигающий кирпич по направлению полке 36 люльки (фиг. 2). При сходе с транспортера ки)пич 37 подн мает отсекатель 38, поворачивающийся на оси 39, и постепенно опускается на нижнюю нлощадку 21 сбрасывателя, проходящую выше люльки. Как только кирпич освободит отсекатель, разъединяется замок 24 30, и сбрасыватель возврапдается в первопачальпое положение. Во время движения каретки за тюлькой конвейера срабатывает заиор, останавлинаюишй очередной кирпич до возвращения каретки. Запор состогг из поворотной планки 40, закрепленной на оси 41, прод()лжепие г ксц-орой является тяга 42, прижатая пружипой 43 к И1,еке 4.
П р е д м е т и з о б р е т е н и я
1. Автомат для передачи кирппча-сырца с выдающего 1сирппч транспортера резательного етапка па полки люлечного конвейера, расположенного параллельно с транспортером и движущегося в одном с ним направлении, в котором для сталкивания кирпича с транспортера ил люльки применен движу п ийся возвратно-поступательно и в поперечном направлении толкатель, отличаюи1.ийся тем, что, с целью обеспечения синхронной работы автомата с движением люлек люлечного конвейера независимо от величины шага между люльками и изменения скорости люлечного конвейера, толкатель установлен на каретке, движущейся возвратно-поступательно в продольном направлении и приводимой в движение от конвейера посредством ловителя, установленного на каретке и взаимодействуюп1его с подвесками люлечного конвейера.
2.Автомат по п. 1, от л и ч а ю щ и йс я тем, что, с целью накопления перед толкателем на транспортере кирпича на каретке над транспортером установлен поперечный упор.
3.Автомат по пп. 1 и 2, отличающийся тем, что, с целью сцепления ловителя с подвеской люлечного конвейера на срок, необходимый на производстве толкателем и кареткой рабочего хода, ловите,-1ь выполнен поворотным и удерживается от поворота подвижными фиксаторами, управляемыми неподвижным конечным выключателем-упором.
4.Автомат по пп. 1-3, отличающийся тем, что для производства холостых обратных ходов толкателя и каретки применены контргрузы, при.соединенные к толкателю тросами, перекинутыми через блоки, установленные на каретке, а к каретке через блоки, установленные на станине автомата.
3 -№ 139960
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки кирпича на полки люлечного конвейера | 1984 |
|
SU1186496A1 |
| АВТОМАТ-УКЛАДЧИК СЫРЦА НА ЛЮЛЕЧНЫЙ КОНВЕЙЕР | 1972 |
|
SU355017A1 |
| Установка для автоматической перегрузки керамических изделий | 1981 |
|
SU988565A1 |
| Устройство для сортировки и укладки заготовок | 1981 |
|
SU977340A1 |
| УКЛАДЧИК КИРПИЧА НА ЛЮЛЕЧНЫЙ КОНВЕЙЕР | 1971 |
|
SU320380A1 |
| Устройство для передачи кирпича-сырца от резательного автомата на полочные вагонетки | 1956 |
|
SU108935A1 |
| Хлебопекарная печь | 1946 |
|
SU70720A1 |
| Устройство для вырезки резиновых заготовок | 1961 |
|
SU141289A1 |
| Устройство для механизации процессов загрузки и разгрузки кольцевой кирпичеобжигательной печи | 1948 |
|
SU88379A1 |
| АГРЕГАТ ДЛЯ ПЕРЕГРУЗКИ СИЛИКАТНОГО КИРПИЧА С ПРЕССА НА ПРОПАРОЧНЫЕ ВАГОНЕТКИ | 1952 |
|
SU103276A1 |