(54) УСТРОЙСТВО ДЛЯ СОРТИРОВКИ И УКЛАДКИ ЗАГОТОВОК


| название | год | авторы | номер документа |
|---|---|---|---|
| Поточная линия для окончательной обработки и комплектации пакетов лифтовых направляющих | 1971 |
|
SU450751A1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| Поточная линия для заключительной отделки текстильных полотен | 1989 |
|
SU1647056A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Поточная линия для сборки и сварки плоскостных ферм | 1977 |
|
SU749606A1 |
| Устройство для укладки в пакет чушек | 1984 |
|
SU1207948A1 |
| Технологическая линия для изготовления строительных изделий | 1986 |
|
SU1426801A1 |
| ЗАГРУЗЧИК ЗАГОТОВОК ПРОТЕКТОРОВ КРУПНОГАБАРИТНЫХ ШИН | 1969 |
|
SU251455A1 |
| ДЕЛИТЕЛЬНО-ЗАКАТОЧНЫЙ АВТОМАТ ДЛЯ ПРОИЗВОДСТВА ТЕСТОВЫХ ЗАГОТОВОК БАРАНОЧНЫХ ИЗДЕЛИЙ | 2012 |
|
RU2490895C1 |
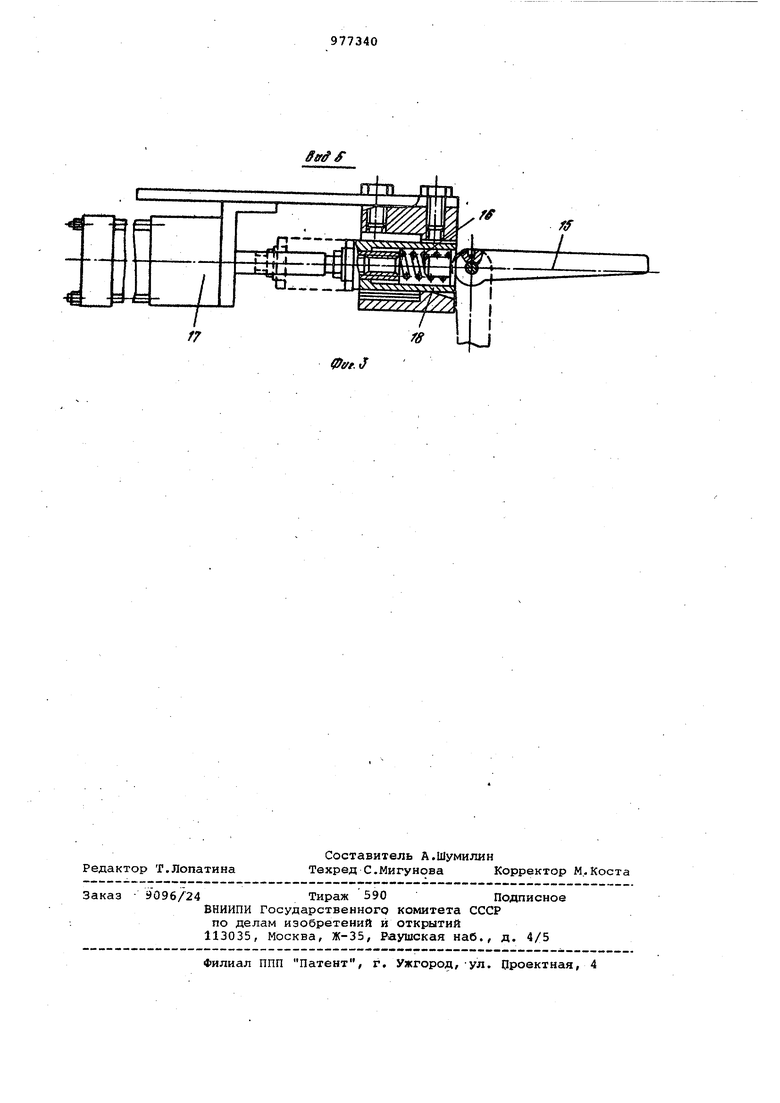
Изобретение относится к оборудоЬанию для производства пневматически шин и может 5ыть использовано на камерных агрегатах в шинной отрасли пром1а1шленн.ости при отборе заготовок автокамер и укладки их, например,на полки люлек движущегося цепного подвесного конвейера. .Известно устройство для сортировки и укладки заготовок автокамер, содержащее кинематически связанный с приводом роликовый рольганг-накопи тель , сталкиватель с рабочими губками, размещенными между роликами, сто с отборочным и отбраковочным транспортерами, установленный на выходе рольГанга-накопителя, и блок управления, соединенный с приводом и сталкивателемГ. Однако известное устройство манип лирует только с одной заготовкой и не обеспечивает ее укладку на много полочные конвейеры, что обуславливает низкую производительность устро ства. Цель изобретения - расширение технологических возможностей. Указанная цель достигается тем, что устройство для сортировки и укладки заготовок, содержащее кинематически связанный с приводом роликовый рольганг-накопитель, сталкиватель с рабочими губками, размещенными между роликами, стол с отборочным и отбраковочным транспортерами, установленный на выходе рольганга-накопителя, и блок управления, соединенный с приводом и сталкивателем, имеет направляницую с установленной на ней кареткой, шарнирно закрепленные одними своими концами на раме стола рычаги и кинематически соединенный с одним из рыЧагов механизм подъема, причем направляющая шарнирно закреплена на других концах рычагов. Каретка имеет синхронизатор, выполненный в виде шарнирно закрепленного рычага, и сбрасыватель, соединенный с блоком управления. Ролики рольганга-накопителя размещены в два ряда. На фиг. 1 изображено предлагаемое устройство, на фиг. 2 - вид по стрелке А на фиг.1; на фиг.З - вид , по стрелке Б на фиг.2. Устройство содержит рольганг-накопитель 1, на станине которого закреплены девять осей, на каждой из которых на подшипниках установлено по два ролика, постоянно вращающихся 2 и циклически вращающихся 3, стапкиватель 4, губки (захваты) которого п ремещаются пневмоцилиядром между.постоянно вращающимися роликами 2 рол (Ганга-накопителя 1, трансмиссию 5, которая представляет собой вал с электромагнитной муфтой и звездочками, привод б (электродвигатель), который осуществляет привод роликов через трансмиссию 5 посредством передачи, стол 7 подъемный, каркас которого состоит из рычагов, выцолненных шарнирно-подвижными с отбороч ным транспортером 8, который представляет собой приводимый наклонный ленточный транспортер, механизм 9 подъема, осуществляющий угол наклона шарнирных рычагов стола 7 подъемного с отбраковочнЕлм транспортером 1 который представляет собой постоянно приводной ленточный транспортер, на шарнирной раме стола 7 подъемного перемещается следящая каретка 11 с синхронизатором 12, сбрасывателем 13 который загружает заготовки автокамер в люльки цепного конвейера, конечник 14 наличия заготовки на рол ганге, рычаг 15, пружина 16, цилиндр 17 взвода синхронизатора, втул ка синхронизатора 18, конечник 19 на личия вентиля на заготовке автокамеры, подвижно закрепленные шарнирные рычаги 20, направляющие 21. Устройство имеет блок управления ( не показан ), связанный с приводом и сталкивателем. Устройство работает следующим образом. Заготовка автокамер, сложенная вдвое (втрое J, подается ленточным транспортером на постоянно вращающие ся ролики 2 рольганга-накопителя 1. В конечном положении при перемещении заготовки автокамеры по рольгангунакопителю она нажимает конечник 14 и,если заготовка не бракованная, т.е. с вентилем,срабатывает конечник 19 наличия вентиля на заготовке автокгимеры. Сталкивателем 4 заготов ка перемещается на циклически вращающиеся ролики 3, аналогично укладывается следующая заготовка. По мере накопления заготовок счетчик считает определенное заданное количес во отбираекшх заготовок и через блок управления включается электромагнитная муфта трансмиссии 5, которая включает привод циклически вращающихся роликов 3, заготовки пере.мещаются с роликов 3 на отборочный транспортер 8 и транспортерной лентой подаются на ролики следящей каретки 11. При наличии люльки подвесного цепного конвейера на рабочей по зиции рычаг 15 синхронизатора 12 упи рается в подвеску люльки, так как пружина 16 синхронизатора настроена на усилие перемещения следящей каретки 11 по направляющим стола 7 подъемного, и движущаяся люлька у цепного конвейера перемещает следующую каретку . Одновременно с перемещением каретки на полку люльки сбрасывателем 13 сдвигаются заготовки автокамер. Укладка осуществляется резким броском с роликов следящей каретки 11, причем первая заготовка автокамеры упирается в,борт полки люльки. Из-за профиля заготовок (рукав), сложенных вдвое (втрое ),и рассчитанного по силе броска сминания заготовок не происходит, и следящая каретка 11 перемещается вдоль роликов очень точно, так как поверхность их талькирована. По окончании пути слежения (0,25 м, при скоростей цепного подвесного конвейера 0,15 м/с) следящая каретка 11 упирается в упор на направляющих стола 7 подъемного, рычаг 15 в шарнире поворачивается на 90° и подвеска люльки освобождается . В исходное состояние следящая каретка 11 возвращается под действием сил тяжести, так как напоавлякицие 21 на столе 7. подъемном установлены под углом 2° -3°. При взводе синхронизатора 12 пневмоцилиндром 17 в рабочее состояние рычаг 15 занимает исходное рабочее положение, так как при перемещении штока цилиндра 17, а вместе со штоком и втулки 18, 15 выпрямляется, т.е. поворачивается на 90°, и пружиной 16 удерживается в этом положении. Укладка следующих заготовок производится аналогично. Бракованные заготовки по отбраковочному транспортеру 10 поступают на ленточный транспортер возврата брака в переработку. Механизмом 3 подъема следящая каретка 11 стола 7 подъемного устанавливается на уровень любой полки люльки подвесного цепного конвейера, так как стол подъемный снабжен шарнирно закрепленными подвижными рычагами 20. Управление устройством в процессе работы осуществляется блоком управления в автоматическом режиме, однако возможно и ручное управление. Предлагаемое устройство позволяет автоматизировать процесс укладки заготовок автокамер на полки люлек движущегося цепного подвесного конвейера, улучшает условия труда, освобождает работаюдих от монотонного физического труда. Формула изобретения 1. Устройство для сортировки и укладки заготовок,преимущественно автокамер, содержащее кинематически связанный с приводом роликовый рольТ-анг-накопитель, сталкиватель с рабочими губками, размещенными между роликами, стол с отборочным и отбраковочньом транспортерами, установленный на выходе рольганга-накопителя, и блок управления, соединенный с приводом и сталкивателем, о т л и ч а ющ е е с я тем, что, с целью расширения технологических возможностей, оно имеет направляющую с установленной на ней кареткой, шарнирно закрепленные одними своими концами на раме стола рычаги и кинематически соединенный с одним из рычагов механизм подъема, причем направляющая шарнирно закреплена на других концах рычагов. 6
в .виде шарнирно закрепленного рычага, и сбрасыватель, соединенный с блоком управления.
o
Источники информации,. принятые во внимание при экспертизе
// rf fJ
V
Фг/g. f фуг. 2
