Изобретение относится к технике управления технологическим оборудованием, и касается, в частности, усовершенствования устройств для управления манипуляторами.
Известен пневматический командоаппарат, содержащий многопозиционный распределитель, привод поворота этого распределителя блок пневмозолотников, подающих воздух в рабочие полости исполнительных цилиндров и пневмонаконечники, обеспечивающие подачу команд на переход к следующему такту 1.
К недостаткам данного пневмати- ческого командо-аппарата следует отнести ограниченные функциональные возможности - управление только пневмоприводом по одной заранее выбранной программе, а также отсутствие постоянного контроля за положением иcпoJiнитeльныx пневмоцилиндров.
Известен также командоаппарат, содержащий программный вал с кулачками, электронный блок форглирования сигналов управления и привод поворота программного вала, каждый кулачок программного вала взаимодействует через плечо двухплечего рычага с перек.гаочателем цепи формирования команды на включение исполнительного механизма 2.
К недостаткам таких командоаппаратов следует отнести их ограниченные функциональные возможности (выдача только электрическихсигналов для управления внешним оборудова-. нием).
Цель изобретения - расширение области применения.
Эта цель достигатеся благодаря тому, что в программном устройстве, содержащемвал с кулачками, каждый из которых одно из плеч двухплечевого рычага связан с перек.пючателем соответствующего исполнительного механизма, блок, управления, выход которого соединен с входом привода поворота вала с кулачками, введены переключатели опроса датчиков обратной связи, установленных на соответствующих исполнительных маханизмах, выходы переключателей опроса соединены с входами блока управления, а на валу установлен дополнительный кулачок, соединенный с дополнительным переключателем поворота вала независимо от состояния исполнительных механизмов, контактная группа которого включена параллельно переключателю опроса датчиков обратной связи.
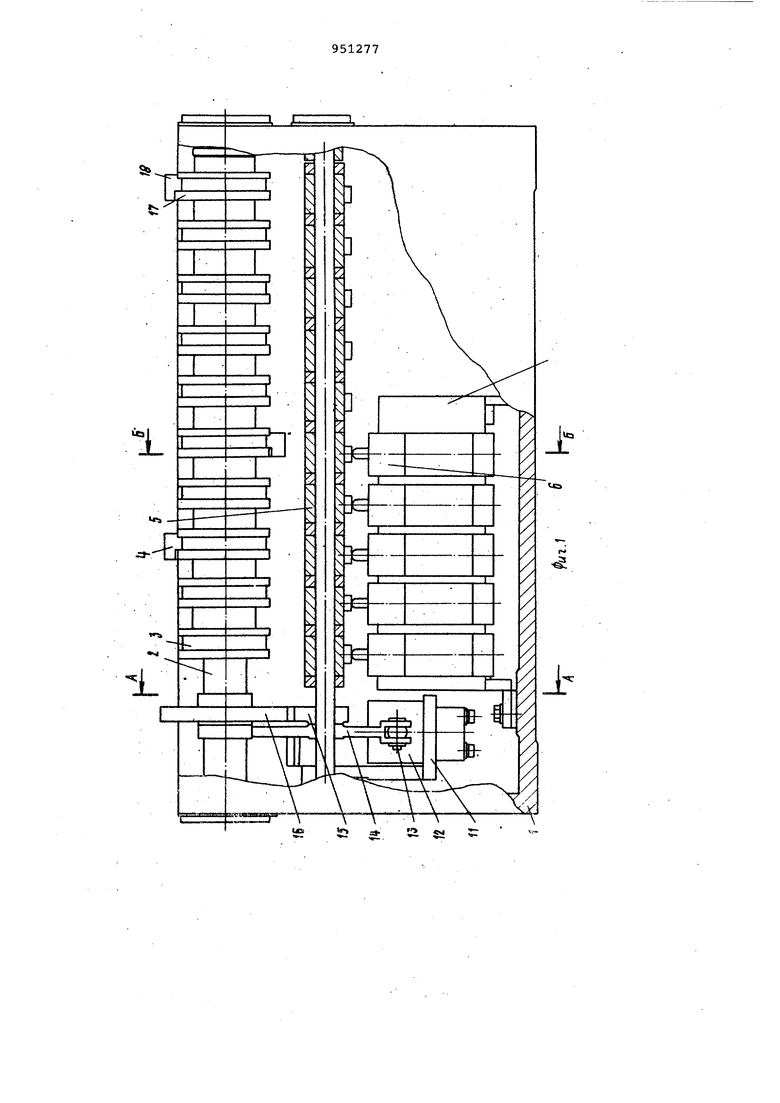
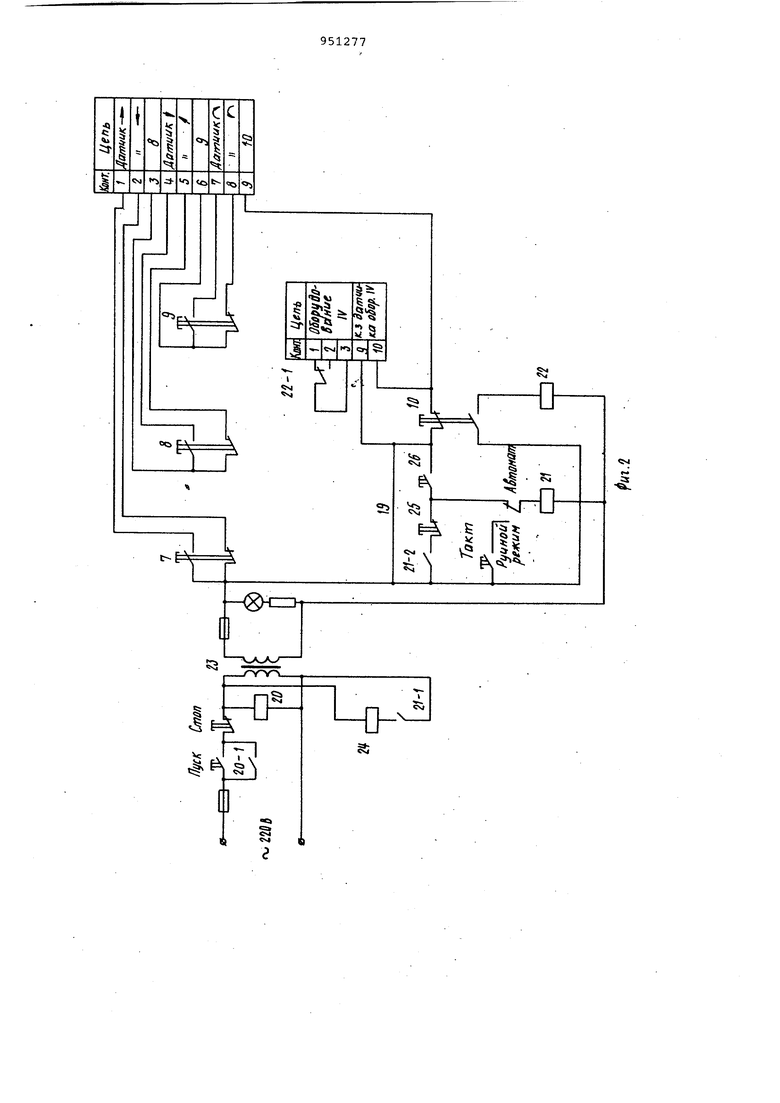
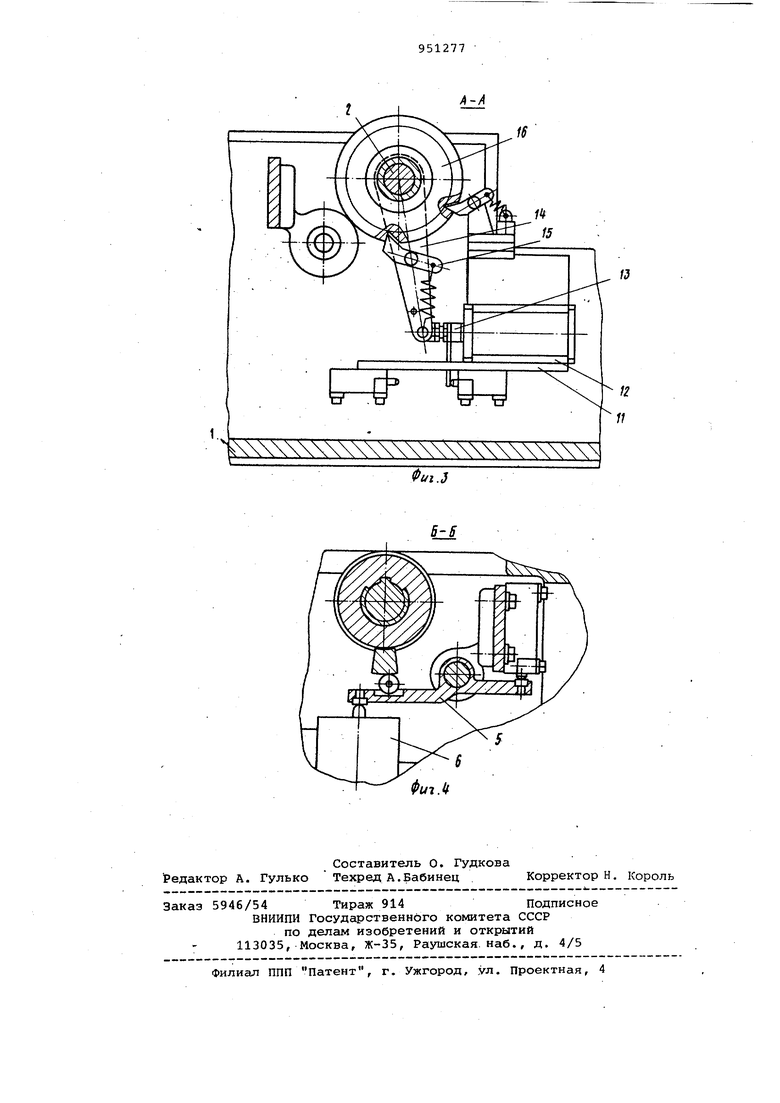
На фиг. 1 показано предлагаемое устройство; на фиг. 2 - электрическая принципиальная схема на фиг. 3 разрез А-А на фиг. 1; на фиг. 4 разрез Б-Б на фиг. 1.
Устройство конструктивно скомпоновано в корпусе 1, в котором расположен в подшипниках качения вал 2. На валу жестко закреплены диски 3с кольцевыми проточками и радиально расположенными резьбовыми отверстиями , служащими для крепления кулачков 4. Кулачки 4 кинематически связаны с двуплечими рычагами 5, которые, в свою очередь, взаимодействуют одним плеч&м с переключателем - пневмозолотниками б подачи воздуха в рабочие полости пневмоцилиндров исполнительных механизмов (не показаны) а другим - с электрическими переключателями 7-10 опроса датчиков обратной связи (фиг. 2), установленных На сооргветствующик исполнительных механизмах (не показаны)-. На. кронштей-: не. 11 установлен пневмоцилиндр 12 поворота вала 2. Со штоком 13 пневмоцилиндра 12 шарнирно соединено водило 14 с собачкой 15, которая.входит в зацепление с храповым колесом 16, жестко закрепленным на валу 2. На валу 2 установлен дополнительный диск 17, на котором закреплен дополнительный кулачок 18, кинематически соединенный через двухплечий рычаг 5 с дополнительным переключателем 19, контактная группа которого включена параллельно переключетелям 7-10 опроса датчиков обратной связи. На корпусе 1 закреплен блок управления. Блок состоит из реле 20-22, трансформатора 23 и электропневмоклапана) 24. Кулачки крепятся к дискам 3 в соответствии с заданной программой работы исполнительных мexaниз Ioв и определяют последовательность выполнения команд. В зависимости от установки кулачков 4 может быть реализована любая программа из к тактов для п единиц оборудования с пневмоприводом и m единиц оборудования с любьом другим приводом. Датчики (конечные выключатели) 25 и 26, взаимодействующие с штоком 13 пневмоцилиндра 12, закреплены на корпусе 1 командоаппарата.
При работе командоаппарата состояние пневмозолотников б (шток нажат или отжат) и состояние соответствующих им переключателей 7- определяется наличием или отсутствием кулачка в данном такте программы на диске 3 (рычаг 5 одновременно обеспечивает ерабатывание упомянутых пневмозолотников и переключателей). Сжатый воздух поступая«через пневмозолотники в цилиндры исполнительных механизмов, обеспечивает заданные по программе
движения. Одновременно переключатели 7-9 готовят цепь опроса датчиков конечного положения по этим движениям При поступлении сигнала от датчиков исполнительных механизмов об окончании движения и при условии, что шток 13 вдвинут (26 - замкнут), запитывается реле, напряжение через контактную группу 21-1 подается на катушку электропневмоклапана 24, который, срабтывая, обеспечивает подачу сжатого возха в пневмоцилиндр 12 .Шток пневмоцилиндра выдвигается, осуществляя чере храповую передачу поворот вала 2 на один шаг, при этом кулачки 4 через рчаг 5 воздействуют на пневмозолотники 6, обеспечивающие новое движение исполнительных механизмов, и на переключатели 7-9 - подготовка цепи опроса новых датчиков. Выдвижение штока вызывает размыкание конечного выключателя 26, и питание реле 21 осуществляется через контакты 21-2 и 25, т.е. после начала выдвижения штока 13 дальнейшее его движение в цикле (до момента полного вдвижения) не зависит от состояния датчиков исполнительных механизмов. При полном выдвижении штока 13 размыкается контактная группа переключателя 25, реле 21 обесточивается, выключая электропневмоклапан 24. Прекращается подача сжатого воздуха в пневмоцилиндр 12, и шток 13 под действием возвратной пружины переходит в исходное положение. Возврат штока 13 контролируется конечным выключателем 26 замыкающегося только в крайне вдвинутом положении щтока, что предотвращает возможность несвоевременного срабатывания реле 21, а, следовательно, и пневмоцилиндра 12 (исключается возможность поворота вала 2 на неполный шаг, возникающая в случае, если шток 13 начинает снова выдвигаться, не достигнув крайнего поло- жения). Дальнейшая работа командоаппарата по сигналам датчиков исполнительных механизмов происходит аналогично описанному.
В командоаппарате предусмотрена возможность управления внешним оборудованием с помощью электрических сигналов. Это обеспечивается переключателем 10, срабатывающим при наличии кулачка 4 на соответствующем диске 3 в требуемом такте программы. Переключатель при срабатывании разрывает цепь питания реле 21 от переключателей 7-9 и одновременно включает реле 22, контакты которого введены на разъем связи с внешним оборудованием. Включение реле 21 для перехода к следующему такту осуществляетсл по сигналу датчика срабатывания внешнего оборудования. Для поворота вала 2 незави симо от состояния исполнительных механизмов и внешнего оборудования в схему командоаппарата введен переключатель 19. Его срабатывание, как и переключателей 7-9, происходи при наличии кулачка на диске 17 вала 2. При этом сигнал на включени реле 21 поступает, минуя цепи опроch датчиков исполнительных механизмов и внешнего оборудования. Число тактов поворота вала 2 соответствуе числу кулачков 4, набранных на диске 3. Следует отметить, что при работе командоаппарата, исключая рабо от. переключателя 19, сигнал на вкл чение реле 21 проходит последовател но через датчики всех задействованных исполнительных механизмов и внешнего оборудования, т.е. собрана схема логического И, что позволяет контролировать не только отработку движения заданного на текущем такте программы, но и неизменность пол жения остальных,.ранее работавших, механизмов. Технико-экономический эффект от использования предлагаемого командо аппарата выражается в расширении функциональных возможностей в управ лении работой манипулятора. Формула изобретения Программное устройство, содержаще вал с кулачками, каждый из котоо через одно из плеч двуплечего рычага связан с переключателем соответствующего исполнительного механизма, блок управления, выход которого соединен с входом привода поворота вала с ку-5 лачками, отличающееся тем, 4Td, с целью расширения области применения, оно содержит переключатели опроса датчиков обратной связи, установленных на соответствующих исполнительных механизмах. выходы переключателей опроса соединены с входами блока управления, а на валу установлен дополнительный кулачок, соединенный с дополнительным переключателем поворота вала независимо от состояния исполнительных механизмов, контактная группа которого включена параллельно переключателю опроса датчиков обратной связи. Источники информации, принятые во внимание при экспертизе 1.Щербаков В.И. Пневматические шаговые командоаппараты роторного типа. Сб. пневмоавтоматика, М., Наука, 1966, с. 42-51. 2.Командоаппараты кулачкового типа КА4000, КА4100, КА4200, КА4300, КА4400, КА4500, КА4500, КА4600(изготовитель - завод низкрвольтной аппаратуру г.Уфа) . Каталог ВНИИЭМ, М., 1972 (прототип). . .
J«
v§
D-
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство управления | 1982 |
|
SU1128239A1 |
| Установка для фасонной обточки пуговиц | 1987 |
|
SU1613354A1 |
| Командоаппарат для управления исполнительными механизмами станков | 1977 |
|
SU739506A1 |
| Устройство для контактнойТОчЕчНОй СВАРКи | 1978 |
|
SU799928A1 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| Пневматическая система управления | 1988 |
|
SU1532900A1 |
| Швейная машина с программным управлением | 1986 |
|
SU1641913A1 |
| Устройство поворота многошпиндельного барабана токарного автомата | 1979 |
|
SU856661A1 |
| Устройство для управления режимами приработки и диагностирования дизеля | 1988 |
|
SU1562727A1 |
a
C)
