NJ
со о:
см
t140
Изобретение относится к робототехнике и может быть использовано при создании исполнительных органов манипуляторов .
Цель изобретения - повышение на дежности захвата деталей.
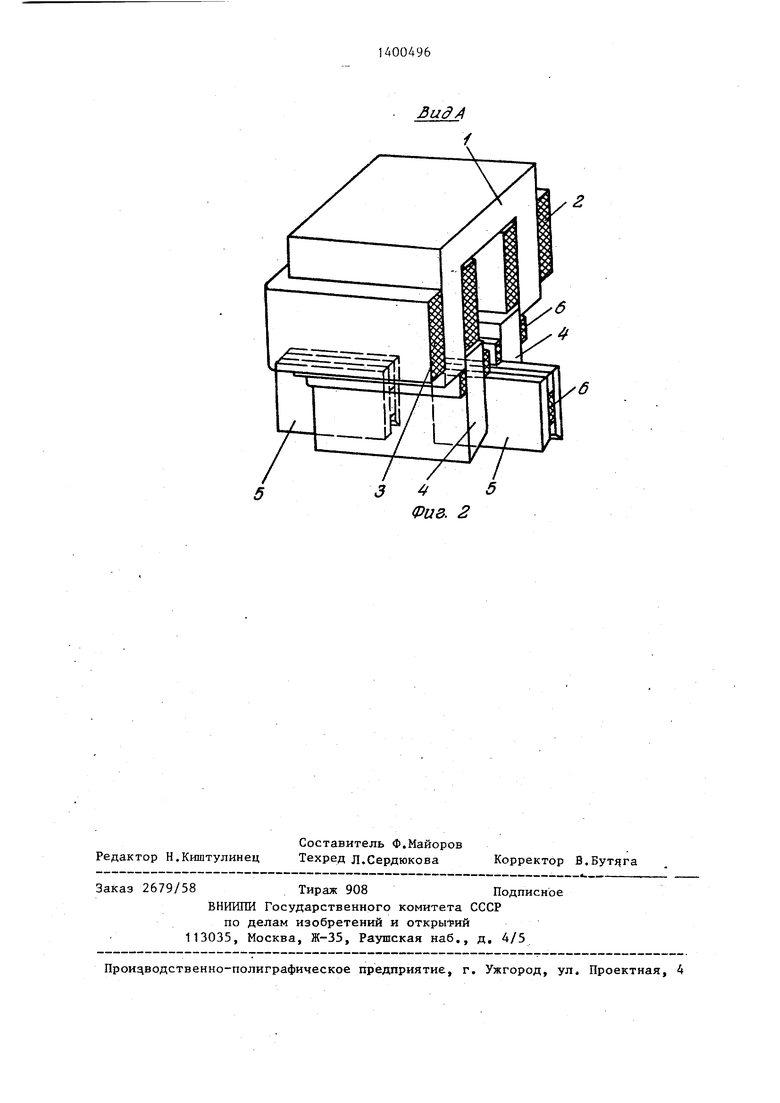
На фиг, 1 изображен схват,общий вид; на фиг. 2 - вид А на фиг. 1, ; Схват загрузочного устройства содержит наружную секцию 1, выполненную П-образной формы, на боковых сторонах которой расположены электри ; ческие обмотки 2 и 3, и внутренние :1 секции 4 и 5, вьшолненные в виде взаимно соединенных и расположенных I параллельно одна другой и боковым I сторонам наружной секции пластин, iПри этом секции установлены телес- ;копически с возможностью линейного iперемещения в одном, перпендикулярно рабочей поверхности схвата, или двух вз аимно-периендикулярных направлениях, что позволяет надежно захватывать детали различного диаметра и длины. Кроме того, схват может содержать сенсорные датчики, выполненные, например, в виде обмоток 6 индуктив- ностей, расположенных между пластинами последней секции и/или вокруг пластин, а рабочие поверхности всех . Ьластин секций 4 и 5 скошены под (углом 60° к их наружной поверхности. Схват работает следующим образом. При подключении обмоток 2 и 3 к источнику электрической знергии (не показан) происходит притягивание за- сватываемой детали к рабочей поверх- (юсти схвата и её транспортирование Ьхватом в рабочую зону. При этом во тянутом положении внутренних секций 4 и 5 схват служит для захвата и Транспортирования обрабатываемых деталей с большим диаметром, в то йремя как при небольших диаметрах секции 4 и 5 выдвигаются так, что обрабатываемые детали могут быть охвачны их рабочими поверхностями.
Таким образом, внутренние секции 4 и 5 образуют выдвигаемый злектро- магнит.
Кроме того, секции 5 имеют возможность выдвигаться в направлении, параллельном рабочей поверхности схвата. Благодаря этой возможности внешние опорные точки рабочих (полюсных) поверхностей в зависимости от направления перемещения либо сводятся ближе для транспортирования относительно коротких обрабатываемых деталей, либо удаляются друг от друга при транспортировании более длинных заготовок, чтобы улучшить опору и таким образом, предотвратить опасность опрокидывания притянутой заготовки.
25 20 Формула изобретения
1.Схват загрузочного устройства для металлорежущего станка, содержащий расположенные одна в другой с возможностью относительно линейного перемещения секции из магнитопроводного материала (магнита) и электрические обмотки, отличающийся тем, что, с целью повышения надежности захвата детали, наружная секция вы- полненА П-образной и на ее боковых сторонах размещены электрические обмотки, а внутренние секции выполнены в виде взаимно соединенных и расположенных параллельно одна другой и боковым сторонам наружной сек-ции пластин.
2, Схват по п.1,о тлич ающий- с я тем, что между пластинами последней внутренней секции и/или вокруг пластин расположены сенсорные датчики,
3,Схват по п.п. 1 и 2, отличающийся тем, что рабочие поверхности пластин секций скошены под углом 60 к их наружной поверхности.
БидА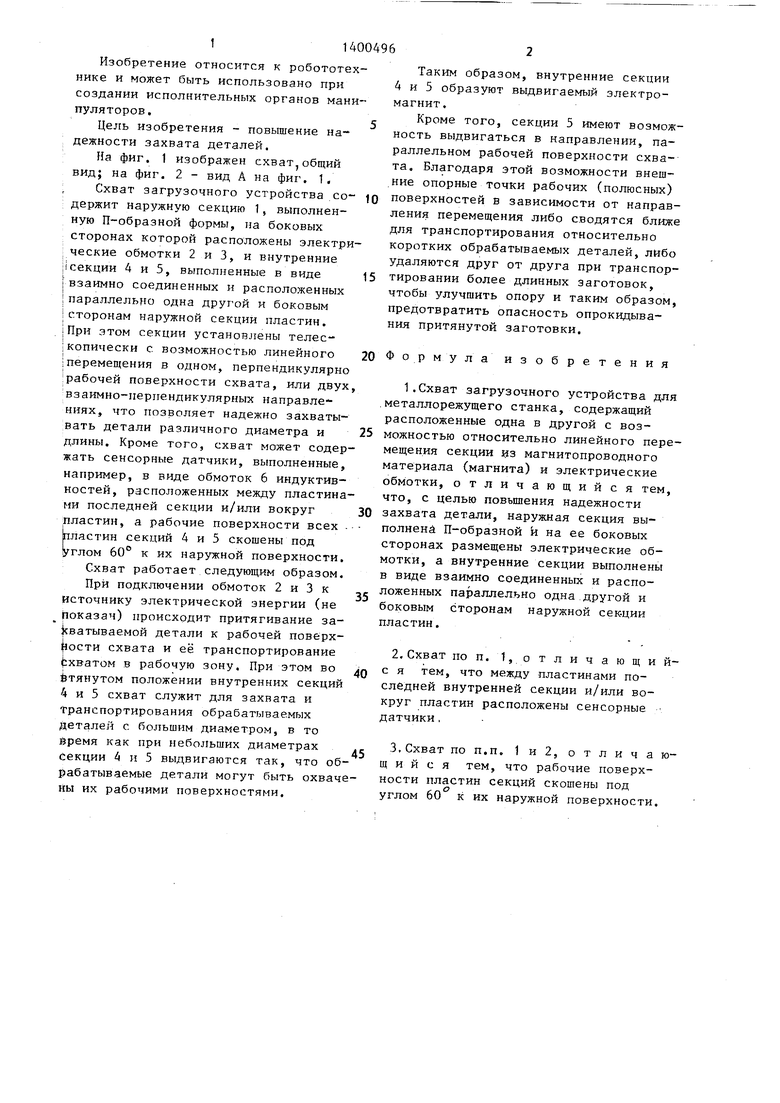
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимной патрон | 1982 |
|
SU1175354A3 |
| Схват манипулятора | 1985 |
|
SU1288053A1 |
| МАШИНА ДЛЯ СКАШИВАНИЯ И ИЗМЕЛЬЧЕНИЯ КУКУРУЗЫ И ПОДОБНЫХ КУЛЬТУР | 1992 |
|
RU2044450C1 |
| СПОСОБ И ШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ПОЛНОГО ШЛИФОВАНИЯ КОРОТКИХ И/ИЛИ СТЕРЖНЕВИДНЫХ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ | 2008 |
|
RU2441739C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ БОБИН ЛЕНТОЧНОГО МАТЕРИАЛА ОТ ЗАПАСНИКА К ПОТРЕБИТЕЛЮ | 1992 |
|
RU2071927C1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Электромагнитный схват | 1985 |
|
SU1306712A1 |
| КОСИЛОЧНАЯ МАШИНА | 1996 |
|
RU2130246C1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ УЗКИХ ПОЛОС РАЗДЕЛЕННОЙ В ПРОДОЛЬНОМ НАПРАВЛЕНИИ ПОЛОСЫ, В ЧАСТНОСТИ ПОЛОСЫ МЕТАЛЛА | 2010 |
|
RU2555285C2 |
Изобретение относится к робототехнике и может быть использовано при со здании исполнительных органов манипуляторов. Цель изобретения - првышение надежности захвата деталей. При подключеннии обмоток 2 и 3 к иточ- .нику электрической энергии происхо - дит притягивание детали к рабочей поверхности схвата.. При этом внутрен ние секции 4 и 5 за счет возможности их выдвигаться перпендикулярно рабочей поверхности схвата могут захватывать детали различного диаметра. Кроме того, возможность перемещения секций 5 вдоль рабочей поверхности схвата позволяет ему надежно захватывать детали различной длины. На схвате могут быть установлены сенсорные датчики, например, выполненые в виде обмоток, а рабочие поверхности, пластин секций 4 и 5 могут иметь скосы под углом 60°к их наружной поверхности. 2 3. п. ф-лы, 2 ил. СО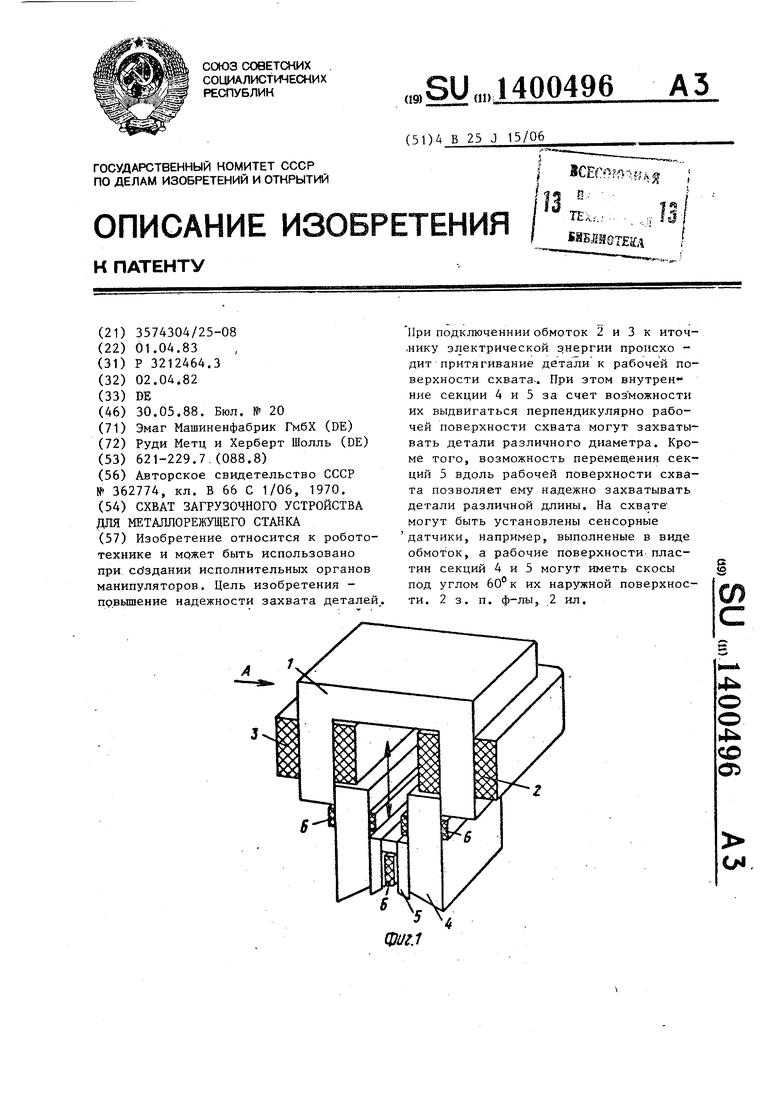
| МАГНИТНО-МЕХАНИЧЕСКИЙ ЗАХВАТ | 0 |
|
SU362774A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
