По основному авт. св. № 211052 известен магнитно-механический захват, содержащий по меньшей мере одиу магнитную шайбу, подвешенную к крюку крана, и подвешенные к тележке крана подвижные в горизонтальной плоскости каретки, оснаш;енные захватными лапами, и привод для перемещения кареток.
Предлагаемый захват отличается тем, что захватные лапы закреплены на каретках с возможностью вертикального перемещения относительно кареток и расположены рядами в направлении перемещения последних. Это позволяет повысить производительность крана при работе с грузами, имеющими различные размеры в плане.
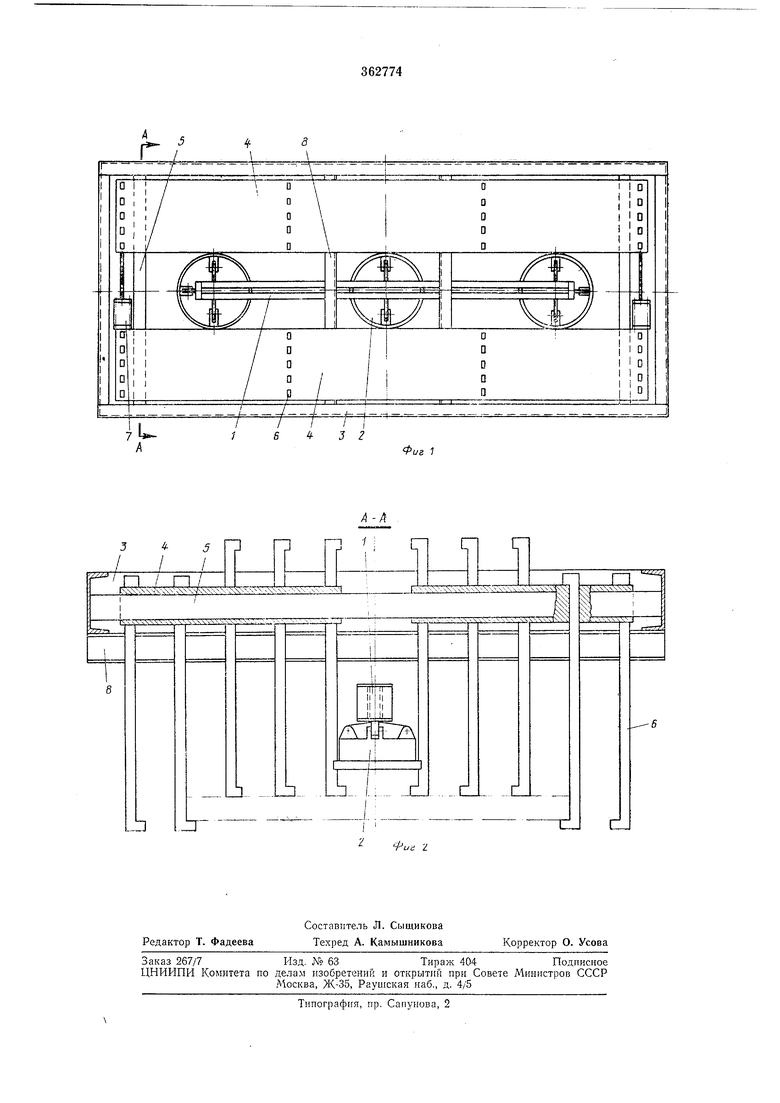
На фиг. 1 изображен описываемый захват, в плане; на фиг. 2 - разрез по Л-Л на фиг. 1.
Рама 1 с тремя электромагнитными щайбами 2 навешивается на крюк крана. Рама 3 с каретками 4 подвешивается к тележке крана. Каретки 4 установлены подвижно на горизонтальных направляющих 5, закрепленных в раме 3.
Захватные лапы 6 пропущены сквозь отверстия в каретках 4 и могут свободно перемещаться в вертикальном направлении. Каретки связаны между собой приводом, например силовым цилиндром 7. На нижней плоскости рамы 3 закреплены поперечины 8 для ограничения подъема рамы 1.
До начала работы посредством привода 7
разводят каретки 4, опускают магнитные шайбы 2 с рамой / на груз, включают электромагнитные шайбы и поднимают раму / с грузом до упора в поперечины 8. При этом часть свободно установленных захватных лап 6 упираются в верхнюю часть груза и поднимаются, скользя в отверстиях кареток 4 и не участвуя в работе. Затем каретки с помощью привода 7 перемещаются навстречу друг другу до упора
свисающих захватных лап 6 в боковую поверхность груза, после чего раму 1 опускают до упора груза на выступы захватных лап. Электромагнитные шайбы 2 выключают и груз, находящийся на захватных лапах, перемещают
к месту укладки.
На месте укладки снова включают электромагнитные шайбы 2, поднимают раму / с грузом, с помощью привода 7 разводят каретки 4 в стороны и опускают груз на площадку, после чего выключают электромагнитные шайбы.
Предмет изобретения
Магнитно-механический захват по авт. св. ЛЬ 211052, отличаю1цийся тем, что, с целью
повыщения производительности крана при работе с грузами, имеющими различные размеры в плане, захватные лапы закреплены на каретках с возможностью вертикального перемещения относительно кареток и расположены
рядами в направлении перемещения последних.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНО-МЕХАНИЧЕСКИЙ ЗАХВАТ | 1968 |
|
SU211052A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Кран мостового типа | 1980 |
|
SU893826A2 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Устройство для нагружения литейных форм | 1976 |
|
SU602301A1 |
| Захватная балка для подъема и опускания шандоров в гидротехнических сооружениях | 1936 |
|
SU57028A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Кран мостового типа | 1980 |
|
SU893825A2 |