Изобретение относится к робототехнике, а именно к исполнительным органам роботов и манипуляторов.
Целью изобретения является обеснече- ние надежности захвата объекта за счет увеличения усилия захвата.
На фиг. 1 изображен схват в исходном положении, общий вид; на фиг. 2 - то же, при захвате объекта; на фиг. 3 - мембрана с электрической обмоткой.
В случае захвата за внутреннюю верхность мембрана, имеющая выпукло в исходном состоянии, распрямляется губки, упираясь в эту поверхность нри распрямлении, удерживают деталь.
Для освобождения схвата необход обесточить обмотку 4, и мембрана нод д ствием сил упругости возвращается исходное состояние.
Величина усилия захвата может рег
Схват манипулятора содержит корнус 1, 10 роваться изменением тока в обмотке 4.
Возможны другие конструктивные ре ния крепления мембраны и расположе губок. Например, мембрана может крепит по периферии, а губки могут иметь возм ность перемещаться по мембране и фи роваться в требуемом положении. Кр того, губки могут располагаться на об поверхностях мембраны для осуществле захвата детали как за внутреннюю, та наружную поверхности детали.
на котором закренлена меморана с центральным отверстием, выполненная из двух слоев 2 и 3, при этом металлы, из которых выполнены слои, обладают различной по величине или знаку магнитострикцией.
Мембрана охвачена электрической обмоткой 4 и на ней закреплены губки 5.
Для захвата объектов за внутреннюю поверхность мембрана может быть выполнена выпуклой, при этом внутренний с.юй имеет большую величину магнитострик- ционного удлинения, че.м наружный.
Схват работает следующим образом.
При подведении губок 5 схвата в захватываемой детали 6 обмотку 4 подключают к источнику электрического напряжения (не показан), нри этом по обмотке 4 протекает электрический ток, создавая магнитное ноле.
Под действием этого магнитого поля слои 2 и 3, образующие ме.мбрану удлиняются на различную величину или одна из них удлиняется, а другая укорачивается, в том числе если они обладают различной по знаку магнитострикцией. Это в свою очередь приводит к изгибу мембраны и захвату детали 6 губками 5 схвата.
В случае захвата за внутреннюю поверхность мембрана, имеющая выпуклость в исходном состоянии, распрямляется и губки, упираясь в эту поверхность нри ее распрямлении, удерживают деталь.
Для освобождения схвата необходимо обесточить обмотку 4, и мембрана нод действием сил упругости возвращается в исходное состояние.
Величина усилия захвата может регулироваться изменением тока в обмотке 4.
Возможны другие конструктивные реще- ния крепления мембраны и расположения губок. Например, мембрана может крепиться по периферии, а губки могут иметь возможность перемещаться по мембране и фикси- роваться в требуемом положении. Кроме того, губки могут располагаться на обеих поверхностях мембраны для осуществления захвата детали как за внутреннюю, так и наружную поверхности детали.
Формула изобретения
. Схват манипулятора, содержащий корпус, в котором установлена мембрана с центральным отверстием, и губки, закрепленные па мембране, отличающийся тем, что, с целью повышения надежности захвата, он снабжен электрической обмоткой, охватывающей мембрану, а мембрана выполнена двухслойной, при этом слои выполнены из металлов, обладающих различной по величине или по знаку магнитострикцией.
2. Схват по п. 1, отличающийся тем, что, с целью обеспечения захвата заготовки за внутреннюю поверхность, мембрана выполнена выпуклой, при этом ее внутренний слой имеет большую величину магнито- стрикционного удлинения, чем наружный.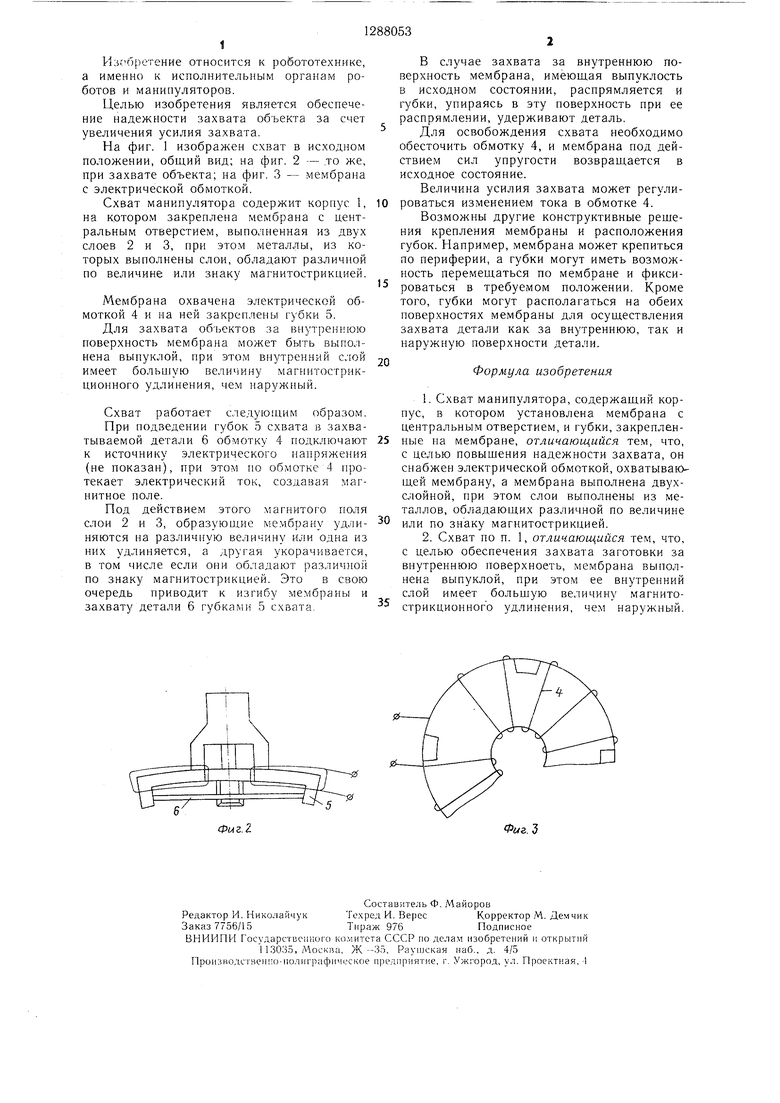
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1301698A1 |
| Схват промышленного робота | 1986 |
|
SU1404336A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1990 |
|
SU1801739A1 |
| Очувствленный схват робота | 1986 |
|
SU1335449A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
Изобретение относится к робототехнике, а именно к исполнительным органам роботов и манипуляторов. Целью изобретения является обеспечение надежности захвата объекта за счет увеличения усилия захвата. При включении к источнику электрического напряжения обмотки 4, охватывающей мембрану, состоящую из двух слоев 2 и 3, выполненных из металлов, обладающих различной по величине или знаку магнитострикцией, происходит ее изгиб, что приводит к сведению губок 5 и захвату ими детали 6. Усилие захвата регулируется изменением величины тока в обмотке 4. Отпускание детали 6 происходит за счет обесто- чивания обмотки 4. 1 з.п. ф-лы, 3 ил. (Л ьо QO 00 о ел со Ф(г. 1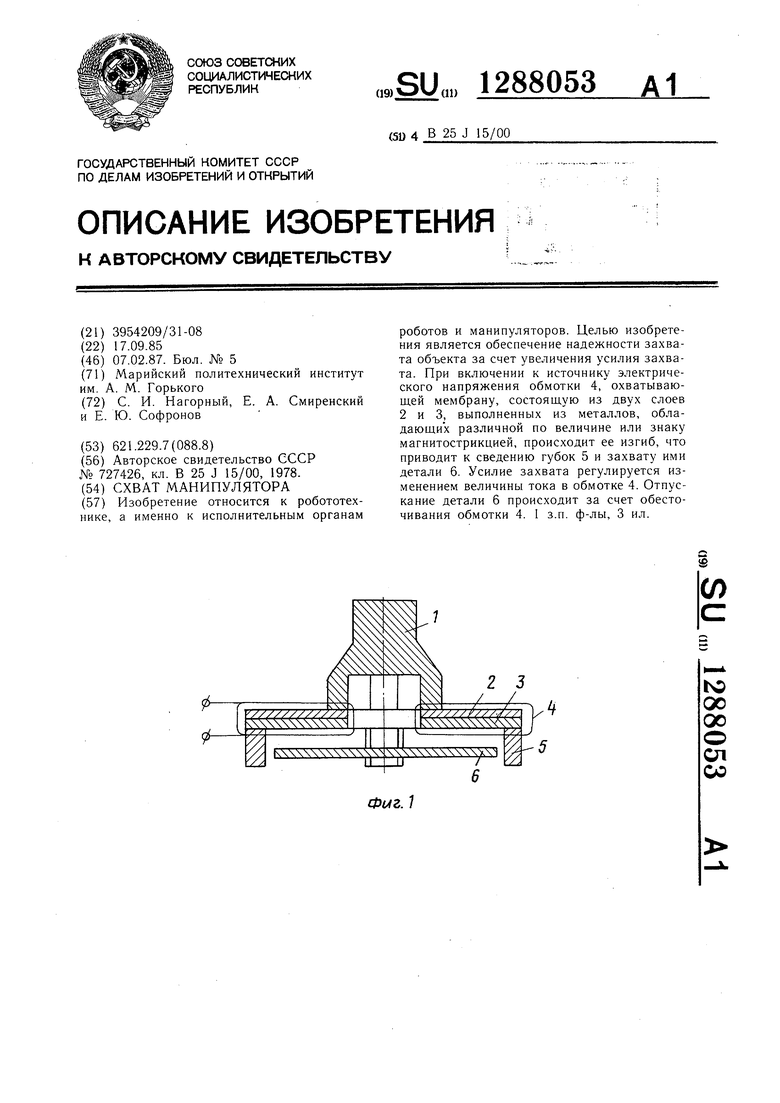
Фиг.Ъ
Составитель Ф. Майоров
Редактор И. НиколайчукТе.кред И. ВересКорректор .4. Демчик
Заказ 7756/15Тираж 976Подписное
ВНИИПИ Государствсаносо комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж--35, PayHJCKan наб., д. 4/5 Пронзводс гвен ;о-1К)лнграфическое предприятие, г. Ужгород, ул. Проектная, -1
| Захват | 1978 |
|
SU727426A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
