ю
00
оо
Т Т - Т
П 11 2 7
: Изобретение относится к весоизмеритель- ной технике и может быть использовано для взвешивания жидкого металла, отливаемого в форму.
Цель изобретения - повышение точно- CTh и надежности устройства.
1 Сущность изобретения состоит в исключении горизонтальных и динамических вертикальных воздействий весовой емкости на весоизмерительные датчики, что обеспечие
что между опорной поверхностью гнезд 3 кантователя 4 и опорами 2 весовой емкости 1 имеется гарантированный зазор А. При заполнении весовой емкости 1 жидким металлом его вес суммируется с весом емкости 1 датчиками 16. После набора некоторой порции металла кантователь 4 под действием пр.ивода (не показан) поворачивается вокруг оси 5 для слива металла, при этом захваты 13 отходят от цапф 12 и
ется наличием промежуточной платформы, Q подвижный клиновой элемент 11 под дейсторной плиты, гибкой в вертикальном правлении, механической связью грузопри- ;ной плиты и промежуточной платформы, также механической связью последней с нтователем с возможностью вертикального пе ремещения.
На чертеже изображено устройство для вешивания расплава.
Устройство содержит весовую емкость 1 опорами 2 в виде цапф, которые входят гнезда 3 на кантователе 4, шарнирно закрепленном посредством оси 5 на стойке 6, установленной на основании 7, снабженном упором 8, опорную плиту 9 со стойками 10, к.шновой элемент 11, подвижно установленный на основании 7 и снабженный цапфа15
20
ми 12, которые через .захваты 13 связыва- 25 вателя 4 реверсируется и весовая емкость
ют клиновой элемент 11 с кантователем 4, клиновой элемент 14, жестко связанный с промежуточной платформой 15, на которой 3 жреплены весоизмерительные датчики 16, грузоприемную платформу 17, посредством
вием пружины 20 перемещается влево (по чертежу) до соприкосновения с упором 8, вследствие чего промежуточная платформа 15 совместно со всеми опирающимися на нее элементами (и весовой емкостью) опускается вертикально.
Наличие на опорных поверхностях гнезд 3 уклонов позволяет вплоть до выбора зазора Д, а значит, и выхода днища емкости 1 из контакта с опорами 19 обеспечить опускание весовой емкости без смещения в горизонтальной плоскости. После выборки зазора А происходят совместное с кантователем 4 опрокидывание весовой емкости 1 вокруг оси 5 и слив жидкого металла. После слива металла привод (не показан) канто1, возвращаясь в исходное положение, устанавливается днищем на опорную плиту 9 и при продолжающемся поворачивании кантователя 4 поверхности гнезд 3 выходят из соприкосновения с опорами 2, а захваты 13
1бких стяжек 18, играющих роль селекто- 30 упираются в цапфы 12 и перемещают вправо (по чертежу) горизонтально-подвижный клиновой элемент 11, под действием которого клиновой элемент 14 поднимается вдоль направляющих 21 и поднимает промежуточную платформу 15 вместе с датчиками 16, грузорэв, связанную с промежуточной платформой 15. На грузоприемной плите 17 закреплены регулируемые опоры 19, для прохода через опорную плиту 9 которых в последней имеются отверстия. Для возврата клинового
эпемента 14 в исходное положение и ограниче- 35 подъемной плитой 17 и регулируемыми опо- ния его хода служит пружина 20 и упор 8. рами 19, которые, проходя через отверстия Е|ертикальное перемещение клинового элемен- опорной плиты 9, упираются в днище носо- та 14 обеспечивается направляющими 21. вой емкости 1 и поднимают эту емкость на
себе до прекращения опускания кантовате- аботает следующим образом.40 - результате образуется зазор А межВ исходном положении захваты 13 кан- ду опорами 2 и поверхностями гнезд 3,
происходит взвещивание пустой емкости 1, а устройство принимает исходное положение для заполнения жидким металлом и его взвещивания. Затем цикл повторяется. Уклоfjibie опоры 19 грузоприемной плиты 17. Вес 45 ны а, р,7, Ф определяются конструкцией ёмкости 1 при этом полностью воспринима- устройства и вычисляются по известным из 4тся весоизмерительными датчиками 16, так теории механизмов и машин методом постро- (taK весовая емкость 1 в данном положении ения профиля кулачков с последующей ли- установлена на регулируемых опорах 19 так, неаризацией этих профилей.
тЬвателя 4 удерживают за цапфы 12 клино- Е)ОЙ элемент 11 в крайнем правом (по чер- 1|ежу) положении. При этом пустая весовая €JMKOCTb 1 днищем опирается на регулируечто между опорной поверхностью гнезд 3 кантователя 4 и опорами 2 весовой емкости 1 имеется гарантированный зазор А. При заполнении весовой емкости 1 жидким металлом его вес суммируется с весом емкости 1 датчиками 16. После набора некоторой порции металла кантователь 4 под действием пр.ивода (не показан) поворачивается вокруг оси 5 для слива металла, при этом захваты 13 отходят от цапф 12 и
подвижный клиновой элемент 11 под дейстподвижный клиновой элемент 11 под дейст
вием пружины 20 перемещается влево (по чертежу) до соприкосновения с упором 8, вследствие чего промежуточная платформа 15 совместно со всеми опирающимися на нее элементами (и весовой емкостью) опускается вертикально.
Наличие на опорных поверхностях гнезд 3 уклонов позволяет вплоть до выбора зазора Д, а значит, и выхода днища емкости 1 из контакта с опорами 19 обеспечить опускание весовой емкости без смещения в горизонтальной плоскости. После выборки зазора А происходят совместное с кантователем 4 опрокидывание весовой емкости 1 вокруг оси 5 и слив жидкого металла. После слива металла привод (не показан) канто1, возвращаясь в исходное положение, устанавливается днищем на опорную плиту 9 и при продолжающемся поворачивании кантователя 4 поверхности гнезд 3 выходят из соприкосновения с опорами 2, а захваты 13
упираются в цапфы 12 и перемещают вправо (по чертежу) горизонтально-подвижный клиновой элемент 11, под действием которого клиновой элемент 14 поднимается вдоль направляющих 21 и поднимает промежуточную платформу 15 вместе с датчиками 16, грузо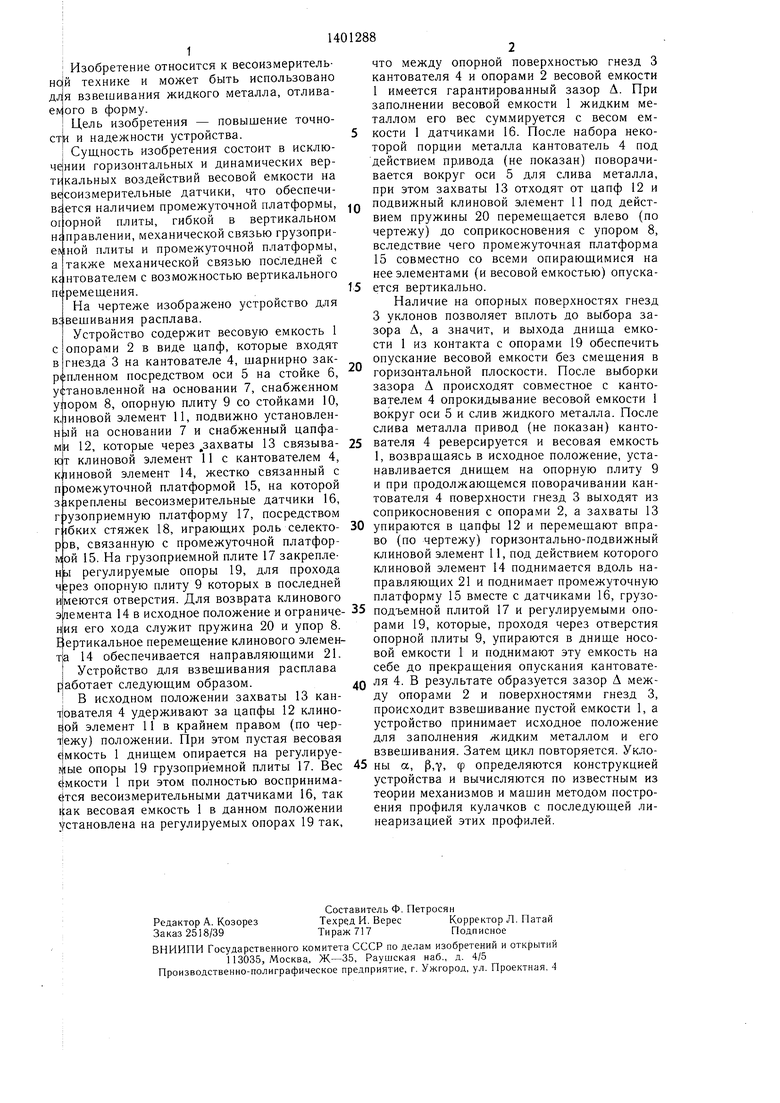
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТАЦИОННЫЕ ВЕСЫ-ДОЗАТОР ХОЗИНА В.В. | 2005 |
|
RU2382338C2 |
| Устройство для взвешивания слитков | 1980 |
|
SU879317A1 |
| Весоизмерительное устройство | 1983 |
|
SU1143988A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ СЖИЖЕННОГО ПРИРОДНОГО ГАЗА | 2017 |
|
RU2668642C1 |
| Аппарат для автоматического взвешивания,дозирования и упаковки штучных пищевых продуктов | 1972 |
|
SU518637A1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| ВЕСЫ | 1994 |
|
RU2085869C1 |
| Устройство для автоматического весового дозирования жидкого металла | 1979 |
|
SU767548A1 |
| Платформенные рычажные весы | 1984 |
|
SU1339634A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕМПА СЛИВА ВЯЗКОЙ МАССЫ ПРИ ИЗГОТОВЛЕНИИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 2010 |
|
RU2448333C1 |

| Устройство для дозирования и заливки жидкого металла | 1978 |
|
SU723387A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU287345A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дозатор Весовой | |||
| Пишущая машина | 1922 |
|
SU37A1 |
