Известны схемы квантования непрерывного сигнала по уровню, построенные на основе модели релейной следящей системы.
Важнейшей характеристикой процесса квантования является максимальное значение ошибки квантования (б кв.) то есть максимальная величина модуля разности между значением непрерывного сигнала и соответствуюш,им ему значением квантованного сигнала. В силу наличия в характеристике следяш,ей системы зоны нечувствительности в начале координат шириной ± U, максимальная ошибка квантования в данном случае равна ((ка} макс .v то есть равна разности между двумя соседними уровнями квантования.
Предлагаемая схема отличается от известных тем, что для уменьшения ошибки процесса квантования на входе релейной системы параллельно входной цепи подключен дополнительный релейный элемент, осуществляюший сдвиг входного сигнала на величину, равную половине зоны нечувствительности. Сдвиг при положительном входном напряжении осуществляется в положительную сторону, при отрицательном - в отрицательную.
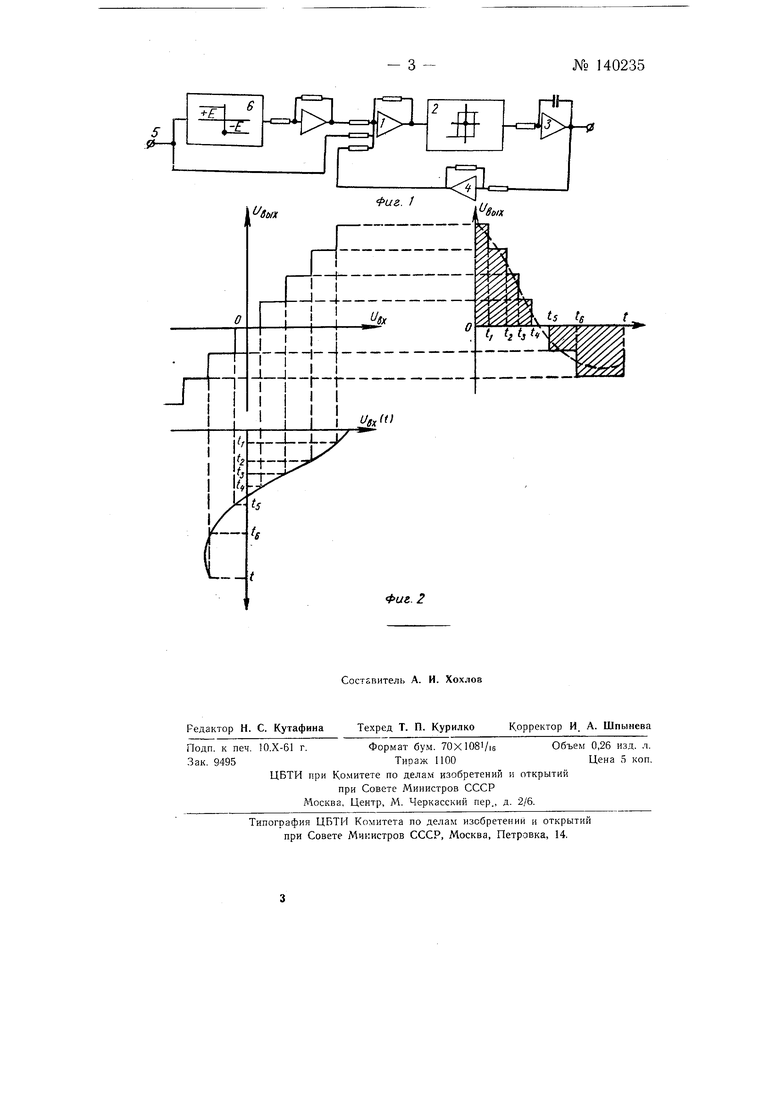
Описываемая схема квантования непрерывного сигнала по уровню (см. фиг. 1) состоит из модели релейной следяшей системы, включающей в себя входной усилитель 1, релейный элемент 2, имеюший характеристику в виде прямоугольной петли гистерезиса, интегрирующего усилителя 3 и усилителя-инвертора 4, включенного в цепь обратной связи.
Описываемая схема позволяет уменьшить ошибку квантования за счет уменьшения зоны нечувствительности в два раза. При этом характеристика передачи релейной следящей системы имеет вид, представленный на фиг. 2.
Для изменения характеристики передачи следящей системы предлагается смещать начало отсчета по оси U.(t) на -Ь - .r при f/j,.0
№ 140235- 2 -
и на„- AL/ev при t/gj. 0, то есть на величину, равную половине
зоны нечувствительности At/.
Таким образом, смещение начала отсчета должно подчиняться закону преобразования сигнала релейным элементом, характеристика которого описывается уравнением:
евыг ----Е при (/, е,„., + при и,.0,
где - Д /У.,.
Для реализации процесса квантования по изложенному принципу на входе 5 релейной системы параллельно входной цепи подключен дополнительный релейный элемент 6 с указанной характеристикой, управляемый сигналом, подлежащим квантованию, и осуществляющий сдвиг входного сигнала на величину, равную половине зоны нечувствительности.
Предмет изобретения
Схема квантования непрерывного сигнала по уровню, построенная на базе модели релейной следящей системы, отличающаяся, теМ, что, с целью уменьщения ощибки квантования, на входе релейной системы параллельно входной цепи подключен дополнительный релейный элемент, осуществляющий сдвиг входного сигнала на величину, равную полов::не зоны нечувствительности.
Фиг. 2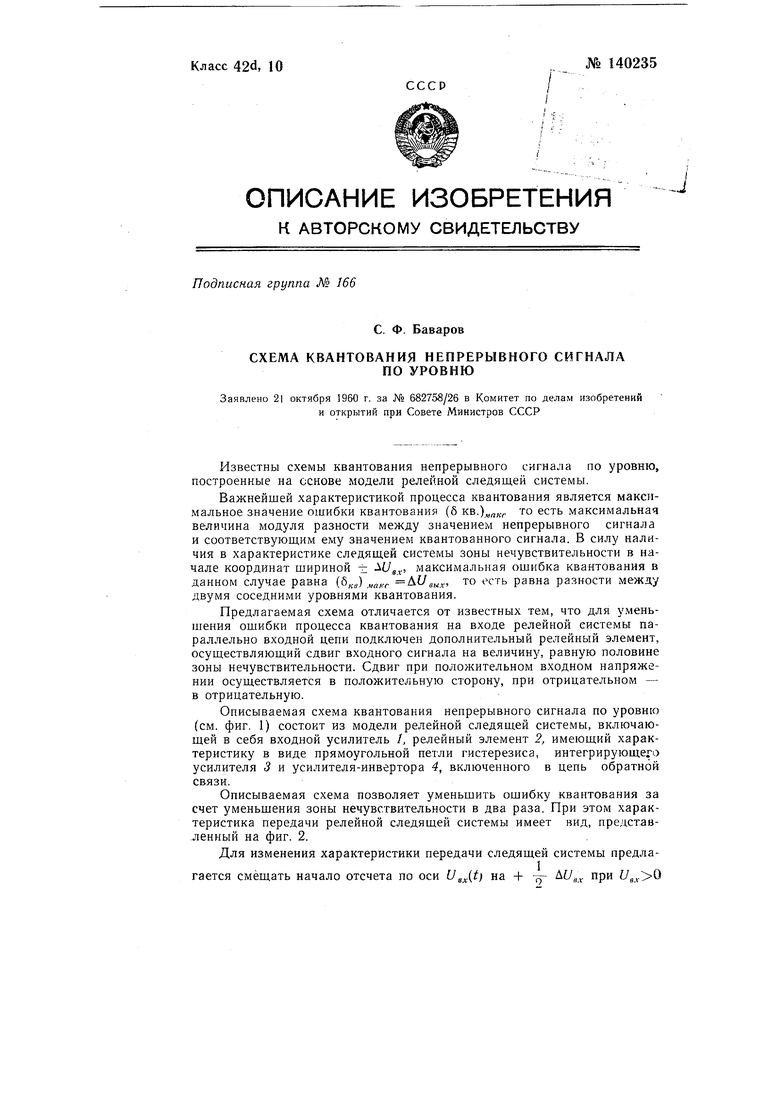

| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА С НЕЛИНЕЙНОЙ КОРРЕКЦИЕЙ | 1971 |
|
SU318907A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНАЯ СЛЕДЯЩАЯ | 1973 |
|
SU370376A1 |
| Следящая система | 1980 |
|
SU962841A1 |
| ПАТЕНТНО- ..;йрШ""^^'^'^' "^ ilbJlHOTITKA | 1970 |
|
SU273534A1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| КОМБИНИРОВАНН'АЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU330426A1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |