Изобретение относится к области автоматического регулирования и управления и может найти применение в тех системах, где используются усилители постоянного тока с ограничением.
Известны комбинированные следяш,ие спстемы, содержащие последовательно соединенные предварительный усилитель, нелинейный блок, усилитель мощности и исполнительный двигатель, о.хваченные пепью единичной обратной связи, а также два дифференцирующих блока, вход одного из которых подключен ко входу системы, а выход - ко входу нелинейного блока и ко входу второго дифференцирующего блока, подключенного ко входу нелинейного блока.
Однако системы, известные под названием комбинированных, имеют тот недостаток, что при наличии в замкнутом контуре регулирования нелинейности типа ограничения, размещенной после точки ввода связи по управляющему воздействию, динамическая ошибка системы принципиально не может быть уменьщена до нуля при линейной связи по управляющему воздействию. Эффективность связи по управляющему воздействию определяется шириной линейной зоны нелинейности типа ограничения.
первого дифференцирующего блока дополнительный усилитель, соединенный с релейным элементом, и источник напряженпя, выход которого соединен со входом ус 1лителя мощностн, а вход - с выходом релейного элемента, связанного также со входом нелинейного блока. Это позволяет увеличить точность системы при медленно меняющихся управляющих воздействиях.
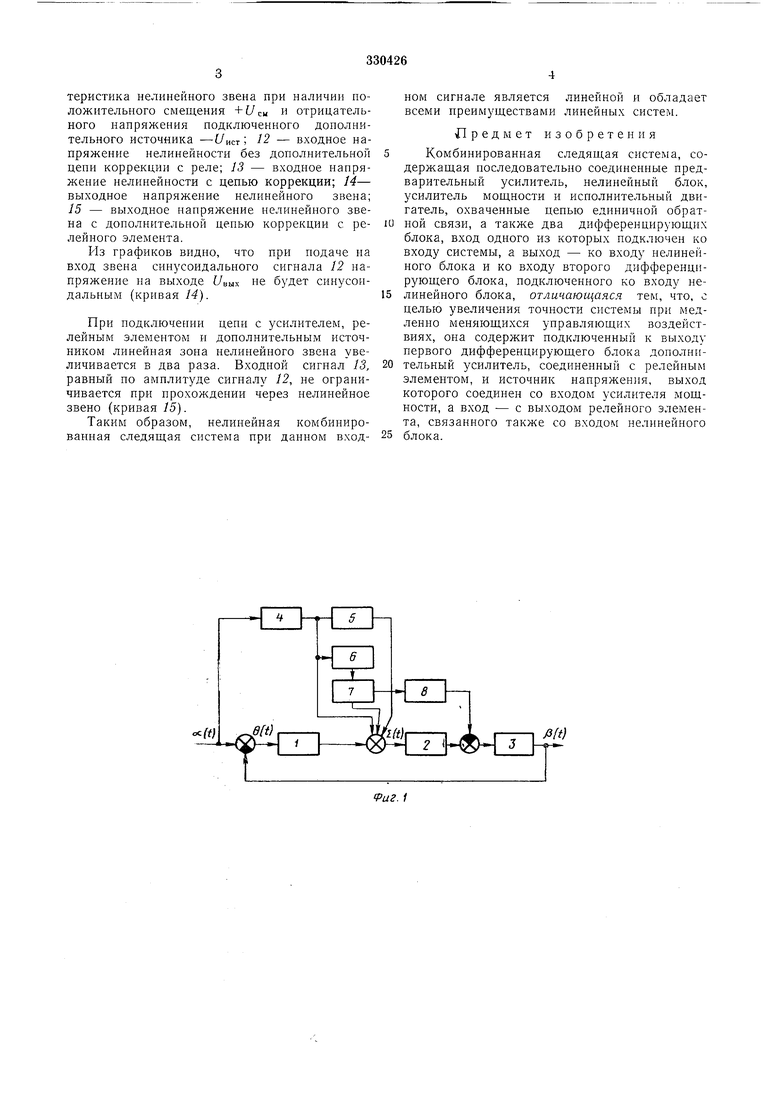
На фиг. 1 представлена схема предлагаемой комбинированной следящей системы, где: / - предварительный усилитель; 2 - нелинейный блок; 3 - блок, включающий усилитель мощности и исполнительный двигатель;
4, 5 - дифференцирующие блоки; 6 - усилитель; 7 - релейный элемент; 8 - источник питания; o.(t) - управляющее воздействие; /J(/) - регулируемая величина; e(t) - ощибка; S(t} - суммарный сигнал на входе нелинейностп.
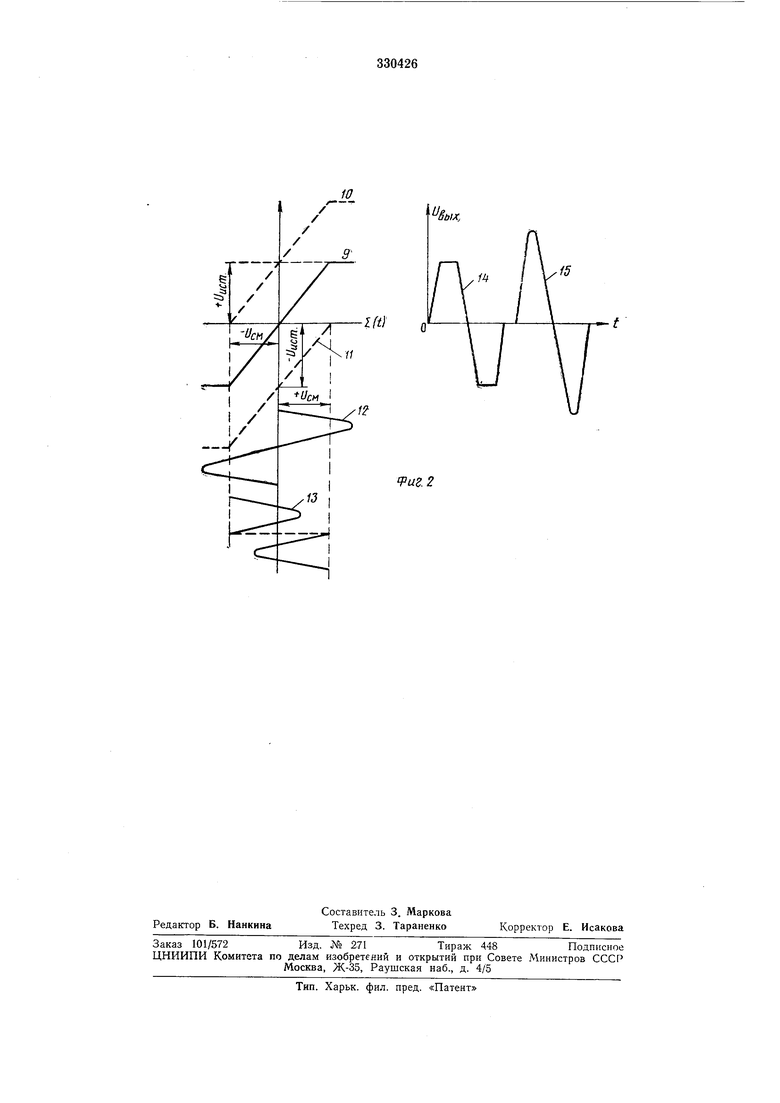
На фиг. 2 представлены графики, иллюстрирующие прохождение гармонического сигнала через нелинейное звено: Овых - сигнал на выходе нелинейности; (/см - напряжение смещения; /исх - нанряжение дополнительного источника; 9 - нелинейная характеристика; 10 - характеристика нелинейного звена при наличии отрицательного смещения - бсм и положительного напряжения
теристика нелинейного звена при наличии положительного смепдения и отрицательного напряжения подключенного дополнительного источника -(/ист; 12 - входное напряжение нелинейности без дополнительной цепи коррекции с реле; 13 - входное напряжение нелинейности с цепью коррекции; 14- выходное напряжение нелинейного звена; 15 - выходное напряжение нелинейного звена с дополнительной цепью коррекции с релейного элемента.
Из графиков видно, что при подаче на вход звена синусоидального сигнала 12 напряжение на выходе f/вых не будет синусоидальным (кривая 14}.
При подключении цепи с усилителем, релейным элементом и дополнительным источником линейная зона нелинейного звена увеличивается в два раза. Входной сигнал 13, равный по амплитуде сигналу 12, не ограничивается при прохождении через нелинейное звено (кривая 15).
Таким образом, нелинейная комбинированная следящая система при данном входном сигнале является линейной и обладает всеми преимуществами линейных систем.
Лредмет изобретения
Комбинированная следящая система, содержащая последовательно соединенные предварительный усилитель, нелинейный блок, усилитель мощности и исполнительный двигатель, охваченные цепью единичной обратной связи, а также два дифференцирующих блока, вход одного из которых подключен ко входу системы, а выход - ко входу нелинейного блока и ко входу второго дифференцирующего блока, подключенного ко входу нелинейного блока, отличающаяся тем, что, с целью увеличения точности системы при медленно меняющихся управляющих воздействиях, она содержит подключенный к выходу первого дифференцирующего блока дополнительный усилитель, соединенный с релейным элементом, и источник напряжения, выход которого соединен со входом усилителя мощности, а вход - с выходом релейного элемента, связанного также со входом нелинейного
блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА С НЕЛИНЕЙНОЙ КОРРЕКЦИЕЙ | 1971 |
|
SU318907A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU328424A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU366454A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Следящая система | 1987 |
|
SU1499315A1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
«W
иг.2
