Изобретение относится к области автоматического регулирования и может быть использовано в тех следящих системах, где наличие нелинейности типа люфта нежелательно.
Известная следящая система состоит из последовательно соединенных предварительного усилителя, усилителя мощности, двигателя с редуктором и объекта, охваченных единичной обратной связью, и релейного элемента, соединенного через усилитель и дифференцирующий блок со входом предварительного усилителя.
Предлагаемая система содержит также подключенную ко входу усилителя мощности модель усилителя мощности с двигателем, вход которой соединен с выходом предварительного усилителя, при этом двигатель через преобразователь подключен к вычитателю, второй вход которого связан с выходом релейного элемента, а выход - со входом усилителя мощности. В результате этого повышается точность следящей системы за счет полной линеаризации нелинейности типа люфта при медленно меняющихся управляющих воздействиях и устранения статической ошибки.
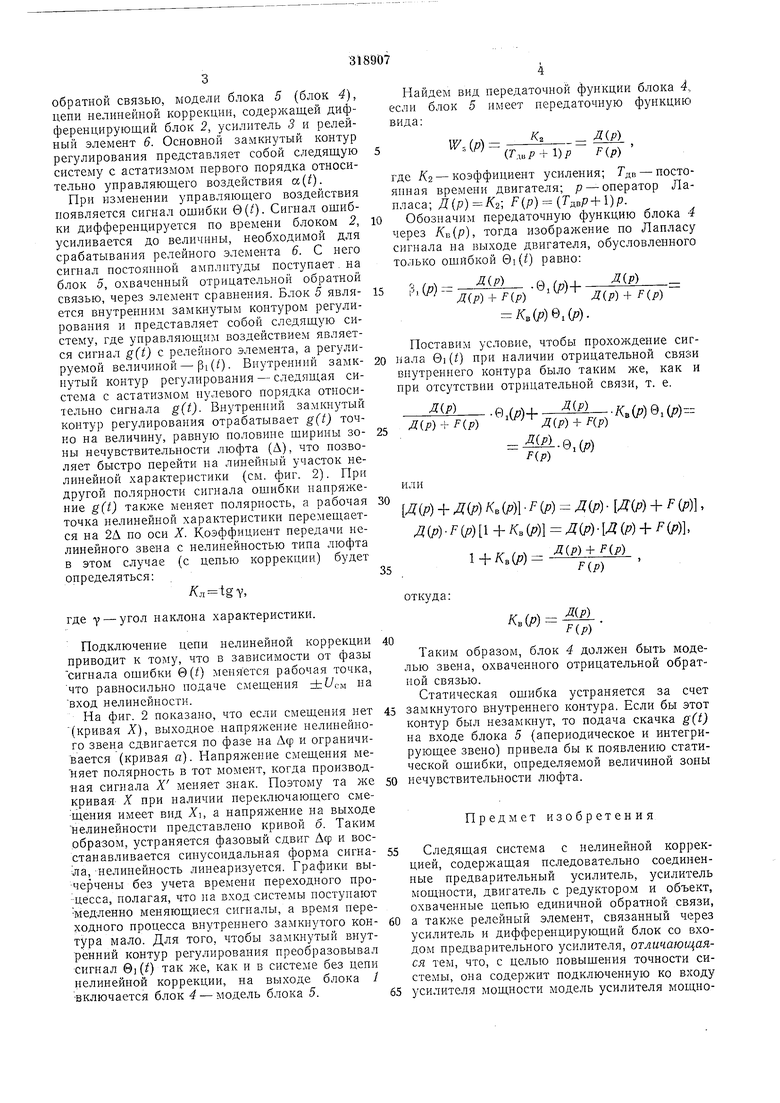
На фиг. 1 представлена структурная схема следящей системы с нелинейной коррекцией где:
сигнал на выходе блока /; 82(0-сигнал ошибки внутреннего замкнутого контура; 2i(0 -сигнал на входе блока 5; g(t} - сигнал на выходе реле; pi (/) - регулируемая величина на выходе внутренней следящей системы;
22(0
суммарный сигнал @i(t)+02()1 - предварительный усилитель; 2 - дифференцирующий блок; 3 - усилитель; 4 - модель; 5-усилитель мощности и двигатель; 6-
релейный элемент; 7 - редуктор с нелинейностью типа люфта; 8 - объект; 9 - преобразователь; 10 - вычитатель.
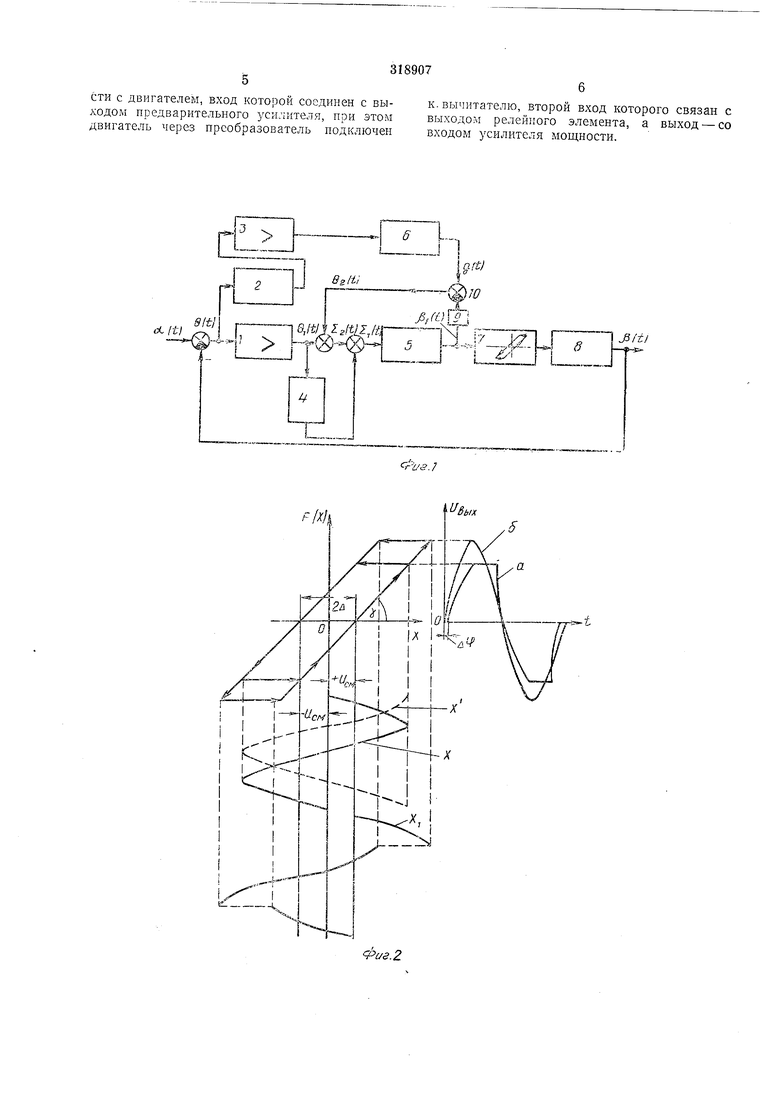
На фиг. 2 представлены графики, иллюстрирующие прохождение гармонического сигнала через нелинейное звено с нелинейностью типа люфт:
F(х - нелинейная характеристика звена; у - угол наклона характеристики; X - входной сигнал нелинейности; X - производная
входного сигнала по времени; X - входной сигнал нелинейности при наличии смещения; ±UCK- напряжение смещения; а - выходное напряжение нелинейного звена нри отсутствии смещения; б - то же, при наличии смещения;
Дф - фазовый сдвиг.
Следящая система с нелинейной коррекцией (фиг. 1) состоит из основного замкнутого контура регулирования, состоящего из блоков 1,5, 7, 8, внутреннего замкнутою контура, состояобратной связью, модели блока 5 (блок 4), цепи нелинейной коррекции, содержащей дифференцирующий блок 2, усилитель 5 и релейный элемент 6. Основной замкнутый контур регулирования представляет собой следящую систему с астатизмом первого порядка относительно управляющего воздействия a(t). При изменении управляющего воздействия появляется сигнал ошибки 6(0- Сигнал ошибки дифференцируется по времени блоком 2, усиливается до величины, необходимой для срабатывания релейного элемента 6. С него сигнал постоянной амплитуды поступает. на блок 5, охваченный отрицательной обратной связью, через элемент сравнения. Блок 5 является внутренним замкнутым контуром регулирования и представляет собой следящую систему, где управляющи, воздействием является сигнал g(t) с релейного элемента, а регулируемой величиной - Pi(0- Внутренний замкпутый контур регулирования - следящая система с астатизмом нулевого порядка относительно сигнала g(t). Внутренний замкнутый контур регулирования отрабатывает g(t) точно на величииу, равную половине ширины зоны нечувствительности люфта (А), что позволяет быстро перейти па линейный участок нелинейной характеристики (см. фиг. 2). При другой полярности сигнала ошибки напряжение g(t) также меняет полярность, а рабочая точка нелинейной характеристики перемещается на 2Д по оси X. Коэффициент передачи нелинейного звена с нелинейностью типа люфта в этом случае (с цепью коррекции) будет определяться: Kn isy, где Y - угол наклона характеристики. Подключение цепи нелинейной коррекции 40 приводит к тому, что в зависимости от фазы сигнала ошибки в() меняется рабочая точка, что равносильно нодаче смещения па вход нелинейности. Па фиг. 2 показано, что если смещения нет 45 (кривая X), выходное напряжение нелинейного звена сдвигается по фазе на Аф и ограничивается (кривая а). Папряжение смещения меняет полярность в тот момент, когда производная сигнала X меняет знак. Поэтому та же кривая X при наличии нереключающего смещения имеет вид Х, а напряжение на выходе нелинейности представлено кривой б. Таким образом, устраняется фазовый сдвиг Аср и восстанавливается синусоидальная форма сигна- 55 ла, нелинейность линеаризуется. Графики вычерчены без учета времени переходного процесса, полагая, что на вход системы поступают медленпо меняющиеся сигналы, а время переходного процесса внутреннего замкнутого контура мало. Для того, чтобы замкнутый внутренний контур регулирования преобразовывал 50 65 Найдем вид передаточной функций блока 4, сли блок 5 имеет передаточную функцию ида: 2 Д(Р) W, (р) (Гдир + 1)р F{p) где KZ - коэффициент усиления; Гдв - постонная времени двигателя; р -оператор Лапласа; Д(р)К2; F(p) ()p. Обозначим передаточную функцию блока 4 через /Св(р), тогда изображение по Лапласу сигнала на выходе двигателя, обусловленного только ошибкой Qi(t) равно: о,(р)ДМ .едр) Д(р) + Р(р) Д(р) + Р(р) K,{p}Q,(p}. Поставим условие, чтобы прохождение сигнала Gi(/) при наличии отрицательной связи внутреннего контура было таким же, как и при отсутствии отрицательной связи, т. е. (/)о/„м Д(Р) 0i(p)+ К(р)&.(р)-- Д(р} + Р(р) Д(Р} + F(P) Д(р) + Д(р) К, (р) Р(р) Д{р). Д(р) + F{p), Л(р}-р(р)1 + К.Ш Д(Р)-1Д{р) + Р{р), 1+К.(, р(р} откуда: Таким образом, блок 4 должен быть моделью звена, охваченного отрицательной обратной связью, Статическая ошибка устраняется за счет замкнутого внутреннего контура. Если бы этот контур был незамкнут, то подача скачка g(t) на входе блока 5 (апериодическое и интегрирующее звено) привела бы к появлению статической ошибки, определяемой величиной зоны нечувствительности люфта. Предмет изобретения Следящая система с нелинейной коррекцией, содержащая пследовательно соединенные предварительный усилитель, усилитель мощности, двигатель с редуктором и объект, охваченные цепью единичной обратной связи, а также релейный элемент, связанный через усилитель и дифференцирующий блок со входом предварительного усилителя, отличающаяся тем, что, с целью повышения точности системы, она содержит подключенную ко входу усилителя мощности модель усилителя мощпости с двигателем, вход которой соединен с выходом предварительного усилителя, при этом двигатель через преобразователь подключен
к. вычитателю, второй вход которого связан с выходол релейного элемента, а выход - со входом усилителя мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАНН'АЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU330426A1 |
| АВТОКОЛЕБАТЕЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326549A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU328424A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| КОМБИНИРОВАННАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU367409A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| Следящая система | 1980 |
|
SU962841A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU366454A1 |
л It)
