,1
«1
4
СО
Изобретение относится к приборостроению и предназначено для использования в делительных машинах для нарезания дифракционных решеток, а также может быть использовано для точного пере.мепд,ения подвижных частей координатно-измерительных машин и оптико-механических приборов.
Цель изобретения - повшиение точности позиционирования за счет возможности осуществления непрерывного перемещения каретки.10
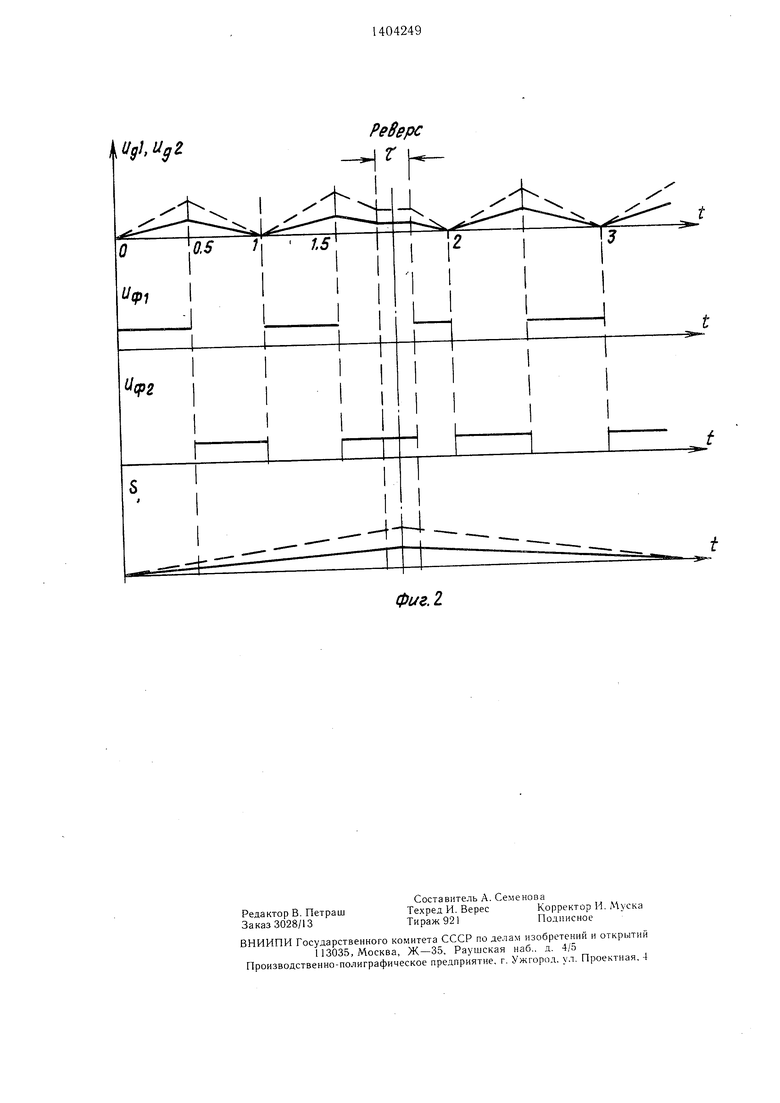
На фиг, представлена конструктивная схема привода линейных перемещений; на фиг. 2 - временные диаграммы управляющих напряжений, подаваемых на движители и фиксаторы, а также соответствующая дна- ляющих 8. С этого момента напряжения Цз.,
ляющие 8. При нодаче линейно возрастающе го напряжения ,, U на приводные элементы 4 и 5 происходит их линейное расширение и приводной элемент 4 через фиксатор 6, зафиксировавшийся в направляющих 8 за счет трения, перемещает каретку 3 влево Фиксатор 7 в это время приводным элементом 5 перемещается вправо.
В момент времени t 0,5, когда напряжения на приводных эле.ментах достигают .максимума, напряжение на фиксаторе 6 выключается, он сжимается и выходит из фиксированного в напрааяяющей 8 положения, а на фиксатор 7 подается напряжение Uc. Фиксатор 7 включается и фиксируется в направ
25
30
грамма перемещении s каретки.
Привод линейных перемещений содержит основание 1, снабженное прямолинейными направляющими 2, каретку 3, установленную в направляющих 2 с. возможностью перемещений, пьезоэлектрические приводные 20 элементы 4 и 5 и фиксаторы 6 и 7, направляющие 8 каретки, блок 9 управления и измеритель 10 перемещений. Внутренними, обращенными друг к другу торцами, нриводные элементы жестко закреплен1з1 на основании привода. Продольные оси приводных элементов ориентированы параллельно направ- ляюнлим 2, в которых установлена каретка 3. Фиксаторы 6 7 устанавливаются в разделительные гильзы 11, жестко связанные с наружными торца.ми приводных элементов 4 и 5. В гильзах фиксаторы установлены с возможностью свободного нереме дения но оси гильзы без перекосов. Фиксаторы расположены между направляющими 8 каретки. В обесточенном состоянии .между торцами фиксаторов и направляющими 8 есть гарантиро- 35 ванный небольшой зазор.
Измеритель 10 перемещений может быть выполнен по известной схеме, например фотоэлектрический, действующий на принципе счета интерференционных полос. Блок 40 9 управления предназначен для формирования прямоугольных напряжений, поочередно подаваемых на фиксирующие элементы, и напряжения треугольной фор.мы, подаваемого на движительные элементы. Частота поступления импульсов на фиксаторы, частота и амплитуда импульсов, поступающих на движительные элементы, могут регулироваться в соответствии с заданными скоро- . стью и отклонением от заданного положения каретки, фактическое значение которых из- 50 меряется измерителем 10 перемещений.
Приюд работает еледующим образом.
В начальный момент времени 1 0 каретка неподвижна относитапьно основания 1, приводные эле.менты 4 и 5, фиксаторы 6 и 7 включены. При подаче напряжения пита- 55 ния UcfH на фиксатор 6 происходит его включение, т.е. он удлиняется до упора в нанрав45
и Уд на приводных элементах 4 и 5 линейно уменьшаются и оба приводных элемента сокращаются по длине. Вследствие этого оба фиксатора 6 и 7 перемещаются к центру двигателя, а каретка продолжает перемещаться по-прежнему влево за счет взаимодействия напраааяющих 8 с фиксатором 7. Далее циклы переключений фиксаторов и приводных элементов повторяются до тех пор, пока не потребуется остановить каретку или изменить направление ее поступатель ного перемещения при колебательных движениях и фиксаторов с .малой амплитудой. Скорость перемещения каретки регулируется изменением амплитудных значений напряжений Уд дви.жителей и частотой изменения напряжений приводных элементов и фиксаторов. Для изменения направления перемещения каретки достаточно в любой момент времени сохранить постоянным уровень напряжения на приводных элементах, затем сменить фазу напряжений на фиксаторах и продолжить процесс переключений в указанном выше порядке.
Формула изобретения
Привод линейных перемещений, содержащий основание, снабженное направляю- цгими, каретку, устаноапенную в направляющих с возможностью перемещения, пьезоэлектрические приводные элементы и пьезоэлектрические фиксаторы, установленные с Боз.можностью взаимодействия с кареткой, и блок управления, выходы которого электри чески связаны с приводными элементами и фиксаторами, а вход - с выходом измерителя перемещений, отличающийся тем, что, с целью повышения точности позиционирования, каретка снабжена двумя направляющими, параллельными упомянутым направляющим оенования, причем приводные элементы установлены с возможностью взаимодействия одним концом посредством фиксаторов с направляющими каретки, а другим концом жестко связаны с основанием.
ляющих 8. С этого момента напряжения Цз.,
ляющие 8. При нодаче линейно возрастающе го напряжения ,, U на приводные элементы 4 и 5 происходит их линейное расширение и приводной элемент 4 через фиксатор 6, зафиксировавшийся в направляющих 8 за счет трения, перемещает каретку 3 влево. Фиксатор 7 в это время приводным элементом 5 перемещается вправо.
В момент времени t 0,5, когда напряжения на приводных эле.ментах достигают .максимума, напряжение на фиксаторе 6 выключается, он сжимается и выходит из фиксированного в напрааяяющей 8 положения, а на фиксатор 7 подается напряжение Uc. Фиксатор 7 включается и фиксируется в направ-
ляющих 8. С этого момента напряжения Цз.,
и Уд на приводных элементах 4 и 5 линейно уменьшаются и оба приводных элемента сокращаются по длине. Вследствие этого оба фиксатора 6 и 7 перемещаются к центру двигателя, а каретка продолжает перемещаться по-прежнему влево за счет взаимодействия напраааяющих 8 с фиксатором 7. Далее циклы переключений фиксаторов и приводных элементов повторяются до тех пор, пока не потребуется остановить каретку или изменить направление ее поступательного перемещения при колебательных движениях и фиксаторов с .малой амплитудой. Скорость перемещения каретки регулируется изменением амплитудных значений напряжений Уд дви.жителей и частотой изменения напряжений приводных элементов и фиксаторов. Для изменения направления перемещения каретки достаточно в любой момент времени сохранить постоянным уровень напряжения на приводных элементах, затем сменить фазу напряжений на фиксаторах и продолжить процесс переключений в указанном выше порядке.
Формула изобретения
Привод линейных перемещений, содержащий основание, снабженное направляю- цгими, каретку, устаноапенную в направляющих с возможностью перемещения, пьезоэлектрические приводные элементы и пьезоэлектрические фиксаторы, установленные с Боз.можностью взаимодействия с кареткой, и блок управления, выходы которого электрически связаны с приводными элементами и фиксаторами, а вход - с выходом измерителя перемещений, отличающийся тем, что, с целью повышения точности позиционирования, каретка снабжена двумя направляющими, параллельными упомянутым направляющим оенования, причем приводные элементы установлены с возможностью взаимодействия одним концом посредством фиксаторов с направляющими каретки, а другим концом жестко связаны с основанием.
Us,UyZ
feffflf
r
-H HII
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изменения направления движения длинномерных грузов | 1984 |
|
SU1180329A2 |
| Модуль манипулятора | 1987 |
|
SU1442393A1 |
| СПОСОБ КРЕПЛЕНИЯ ПЬЕЗОЭЛЕМЕНТА В ИНЕРЦИОННОМ ПЬЕЗОЭЛЕКТРИЧЕСКОМ ДВИГАТЕЛЕ И ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2015 |
|
RU2587984C1 |
| Резонансный привод промышленного робота | 1987 |
|
SU1570892A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2045126C1 |
| Модуль линейного перемещения промышленного робота | 1989 |
|
SU1664546A1 |
| Маркирующее устройство | 1985 |
|
SU1286438A1 |
| Манипулятор | 1989 |
|
SU1641606A1 |
| Прибор для определения фрикционных свойств нитей | 1990 |
|
SU1772697A1 |
| Устройство задания больших перемещений рабочего органа машины по направляющей | 1988 |
|
SU1695271A1 |
Изобретение относится к приборостроению и предназначено для использования в делительных машинах для нарезания дифракционных решеток, а также может быть использовано для точного перемеш,ения подвижных частей координатно-измеритель- ных машин и оптико-механических приборов. Цель изобретения - повышения точности позиционирования за счет возможности осуществления непрерывного перемещения каретки. При подаче напряжения питания на пьезоэлектрический фиксатор.6 он удли 23 1 Х/х/ ХХ. Ухху/Хххх/Ь X няется до упора в направляющие 8. При подаче напряжения на пьезоэлектрические приводные элементы 4 и 5 происходит их линейное расширение, и приводной элемент 4 через фиксатор 6, зафиксированный в направляющих 8 за счёт трения, перемещает каретку 3 влево. Пьезоэлектрический фиксатор 7 перемещается вправо. Когда напряжение на приводных элементах достигает максимума, напряжение на фиксаторе 6 выключается, он сжимается и выходит из фиксированного в направляющей 8 положения, а на фиксатор 7 подается напряжение, он фиксируется в направляющих 8. С этого момента напряжения на приводных элементах 4 и 5 уменьшаются, и оба приюдных элемента сокращаются по длине. Вследствие этого оба фиксатора 6 и 7 перемещаются к центру, а каретка продолжает перемещаться по- прежнему влево за счет взаимодействия направляющих 8 с фиксатором 7. Далее циклы переключений фиксаторов и приводных элементов повторяются. 2 ил. S 8 П ////J-/xJ /// / rffl ffj fl с (Л
фиг. 2
| Barlett R | |||
| and Wilgy P | |||
| С | |||
| Applied Optics, 1975, № 1, p | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
