Фие1
Изобретение относится к робототехнике и предназначено для использования в автоматизированном технологическом оборудовании, например микроэлектронного производства, и может быть применено при создании промышленных роботов широкого технологического назначения.
Целью изобретения является расширение технологических возможностей за счет обеспечения независимых перемещений предметного стола по двум взаимно перпендикулярным направлениям.
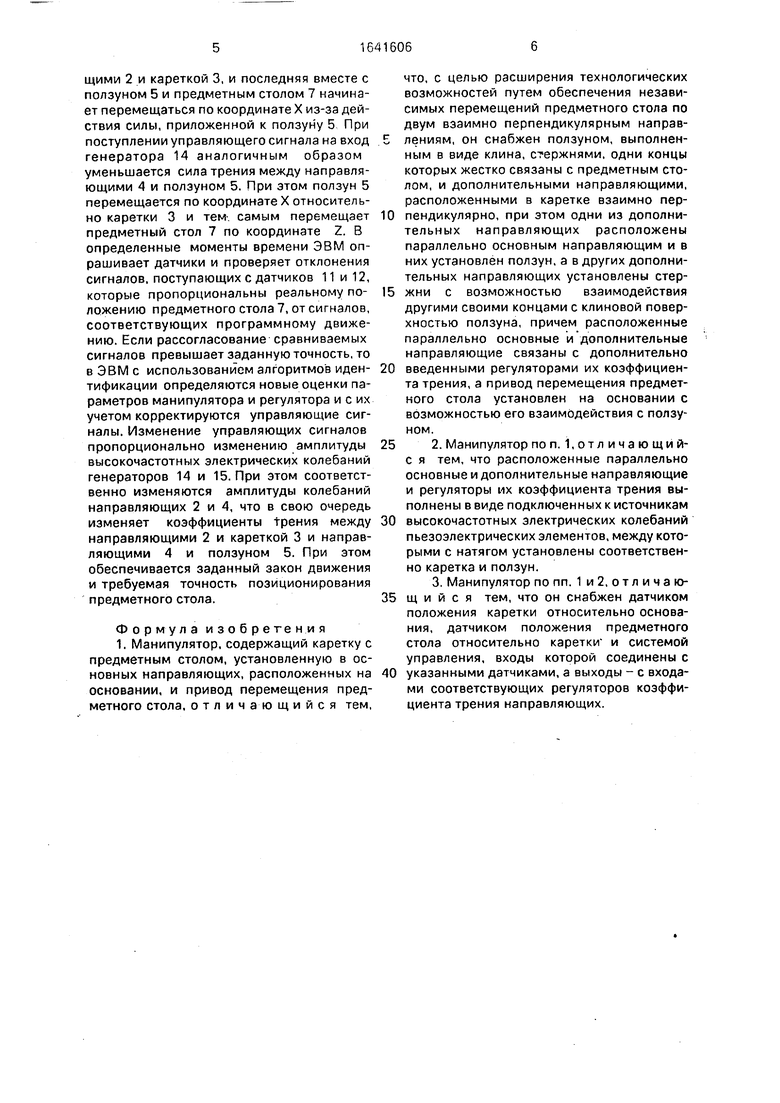
На фиг. 1 изображена схема манипулятора, разрез; на фиг. 2 - разрез А-А на фиг. 1 (с системой управления).
Манипулятор содержит основание 1 с основными пьезоэлектрическими направляющими 2. Между направляющими 2 с натягом размещена каретка 3, с которой связаны дополнительные пьезоэлектрические направляющие А, а между ними с натягом размещен ползун 5. В плоскости клиновидного сечения ползуна 5 с ним кинематически связаны концы стержней 6, которые другими концами жестко соединены с предметным столом 7. Стержни 6 установлены в дополнительных направляющих, расположенных на каретке 3 перпендикулярно направлению движения ползуна 5. Постоянную кинематическую связь между ползуном 5 и стержнями 6 обеспечивают упругие элементы 8. С ползуном 5 взаимодействует привод, выполненный в виде реверсивного вибродвигателя, пьезоэлектрический преобразователь 9 которого прижат к ползуну упругим элементом 10 (в качестве приводного механизма может применяться и привод другого вида). Датчик линейного перемещения 11 связан с предметным столом, а аналогичный датчик 12 - с кареткой, В качестве датчиков могут использоваться любые преобразователи перемещения в электрический сигнал. Например, в данном манипуляторе могут применяться фотоэлектрические датчики с нормированным выходом или лазерные интерферометры. Выходы датчиков 11 и 12 соединены с входами собственного блока управления 13, выполненного на базе мик- роЭВМ, например Электроника-60, Выходы собственно блока управления 13 соединены с входами источников высокочастотных электрических колебаний 14 - 16, выходы которых соединены соответственно с горизонтальными направляющими 2 каретки 3, с направляющими 4 ползуна 5 и преобразователем вибродвигателя. В качестве источников высокочастотных электрических колебаний могут быть использованы
любые управляемые генераторы электрических колебаний.
Позицией 17 обозначены упругие элементы.
Манипулятор работает следующим образом.
В исходном положении каретка 3 и ползун 5 находятся в зафиксированных состояниях за счет сил трения покоя FK и Fn,
0 возникающих между пьезоэлектрическими направляющими 2 и кареткой 3 и соответственно между направляющими 4 и ползуном 5. Необходимые величины сил трения покоя обеспечивают упругие элементы 17.
5 Исходное положение предметного стола 7 определяется координатой Хк каретки 3 и координатой Хп ползуна 5, которой соответствуют нулевые уровни выходных сигналов датчиков 11 и 12.
0 Перемещение предметного стола 7 в желаемую позицию или по заданной траектории осуществляется при реализации программы, заложенной в память управляющей микроЭВМ 13. Пакет управляющей
5 программы включает в себя модуль программирования движения, модуль регулирования и модуль адаптивного управления. С учетом требуемой точности и конструктивных ограничений и согласно желаемым
0 координатам предметного стола 7 X, Z и последующим изменениям этих координат ДХ и Д2 в ЭВМ формируется программное движение в виде цифровых сигналов. Согласно этим сигналам и с учетом апри5 орной информации, введенной в ЭВМ, формируются сигналы, осуществляющие программное движение. Данные сигналы поступают на входы генераторов высокочастотных электрических колебаний 14 и 15.
0 Одновременно с ЭВМ поступает сигнал на вход генератора высокочастотных электрических колебаний 16, При этом данный генератор запускается и возбуждает высокочастотные резонансные колебания
5 пьезоэлектрического преобразователя 9, из-за чего образуется движущая сила, приложенная к ползуну 5 вдоль направляющих 4. Движение предметного стола зависит от используемого алгоритма, который опре0 деляет последовательность поступления управляющих сигналов на входы генераторов 14 или (и) 15. Если, например, вначале осуществляется перемещение по координате X, то управляющий сигнал поступает на
5 вход генератора 14. Данный генератор запускается и возбуждает высокочастотные механические колебания направляющих 2. При этом между ними и кареткой 3 образуется сжатая газовая пленка, из-за чего снижается сила трения между направляющими 2 и кареткой 3, и последняя вместе с ползуном 5 и предметным столом 7 начинает перемещаться по координате X из-за действия силы, приложенной к ползуну 5 При поступлении управляющего сигнала на вход генератора 14 аналогичным образом уменьшается сила трения между направляющими 4 и ползуном 5. При этом ползун 5 перемещается по координате X относительно каретки 3 и тем- самым перемещает предметный стол 7 по координате Z. В определенные моменты времени ЭВМ опрашивает датчики и проверяет отклонения сигналов, поступающих с датчиков 11 и 12, которые пропорциональны реальному положению предметного стола 7, от сигналов, соответствующих программному движению. Если рассогласование сравниваемых сигналов превышает заданную точность, то в ЭВМ с использованием алгоритмов идентификации определяются новые оценки параметров манипулятора и регулятора и с их учетом корректируются управляющие сигналы. Изменение управляющих сигналов пропорционально изменению амплитуды высокочастотных электрических колебаний генераторов 14 и 15. При этом соответственно изменяются амплитуды колебаний направляющих 2 и 4, что в свою очередь изменяет коэффициенты трения между направляющими 2 и кареткой 3 и направляющими 4 и ползуном 5. При этом обеспечивается заданный закон движения и требуемая точность позиционирования предметного стола.
Формула изобретения 1. Манипулятор, содержащий каретку с предметным столом, установленную в основных направляющих, расположенных на основании, и привод перемещения предметного стола, отличающийся тем,
что, с целью расширения технологических возможностей путем обеспечения независимых перемещений предметного стола по двум взаимно перпендикулярным направлениям, он снабжен ползуном, выполненным в виде клина, стержнями, одни концы которых жестко связаны с предметным столом, и дополнительными направляющими, расположенными в каретке взаимно перпендикулярно, при этом одни из дополнительных направляющих расположены параллельно основным направляющим и в них установлен ползун, а в других дополнительных направляющих установлены стержни с возможностью взаимодействия другими своими концами с клиновой поверхностью ползуна, причем расположенные параллельно основные и дополнительные направляющие связаны с дополнительно
введенными регуляторами их коэффициента трения, а привод перемещения предметного стола установлен на основании с возможностью его взаимодействия с ползуном.
2. Манипулятор по п. 1,отличающийс я тем, что расположенные параллельно основные и дополнительные направляющие и регуляторы их коэффициента трения выполнены в виде подключенных к источникам
высокочастотных электрических колебаний пьезоэлектрических элементов, между которыми с натягом установлены соответственно каретка и ползун.
3. Манипулятор по пп. 1 и2,отличающ и и с я тем, что он снабжен датчиком положения каретки относительно основания, датчиком положения предметного стола относительно каретки и системой управления, входы которой соединены с
указанными датчиками, а выходы - с входами соответствующих регуляторов коэффициента трения направляющих.
А-А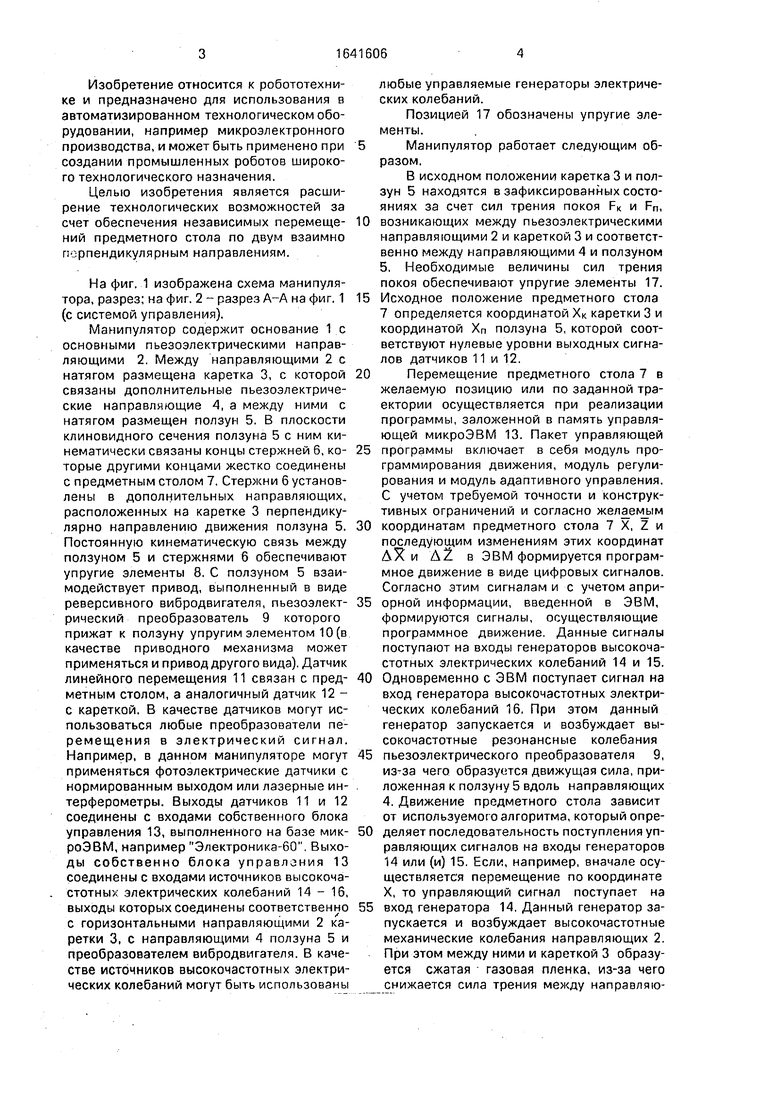
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1433788A1 |
| Двухкоординатный стол | 1980 |
|
SU948603A1 |
| Устройство для управления позиционирующим механизмом | 1986 |
|
SU1313650A1 |
| Устройство для ориентированного перемещения изделий | 1982 |
|
SU1018265A1 |
| Прибор для автоматического определения твердости по Бринеллю | 1978 |
|
SU920458A2 |
| Двухкоординатное сканирующее устройство | 1978 |
|
SU742853A1 |
| ВИБРОДВИГАТЕЛЬ | 1995 |
|
RU2113050C1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516056A1 |
| Манипулятор | 1986 |
|
SU1333570A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА | 1990 |
|
RU2068984C1 |
Изобретение относится к робототехнике, предназначено для использования в автоматизированном технологическом оборудовании и может быть применено при создании промышленных роботов. Целью изобретения является расширение технологических возможностей за счет обеспечения независимых перемещений предметного стола по двум взаимно перпендикулярным направлениям. Для обеспечения независимого перемещения предметного стола 7 по двум взаимно перпендикулярным направлениям и изменения закона его движения во время работы манипулятора каретка 3, установленная в горизонтальных пьезоэлектрических направляющих, снабжена ползуном 5 клиновидного сечения, который установлен между аналогичными дополнительными направляющими, а с ползуном одними концами кинематически связаны стержни 6, другие концы которых соединены с предметным столом. При наличии активной си.- лы, приложенной к ползуну 5, и за счет изменений согласно заданному закону программного движения предметного стола 7 амплитуд высокочастотных колебаний пьезоэлектрических направляющих между направляющими и кареткой с ползуном изменяются коэффициенты трения. Вследствие этого соответственно меняется и закон движения предметного стола 7. Требуемая точность отслеживания заданной траектории и позиционирования обеспечивается за счет корректирования управляющих сигналов с учетом информативных сигналов, поступающих с датчиков положения предметного стола. 2 з.п. ф-лы, 2 ил. V е Os Јь О Os
V
Фиг 2
| Механизм шагового перемещения | 1977 |
|
SU666037A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
