fi б 6 6J ;g И ,
141 U хчт / /1 /, I I If I I
-Л
,f
00
..
о оо tc
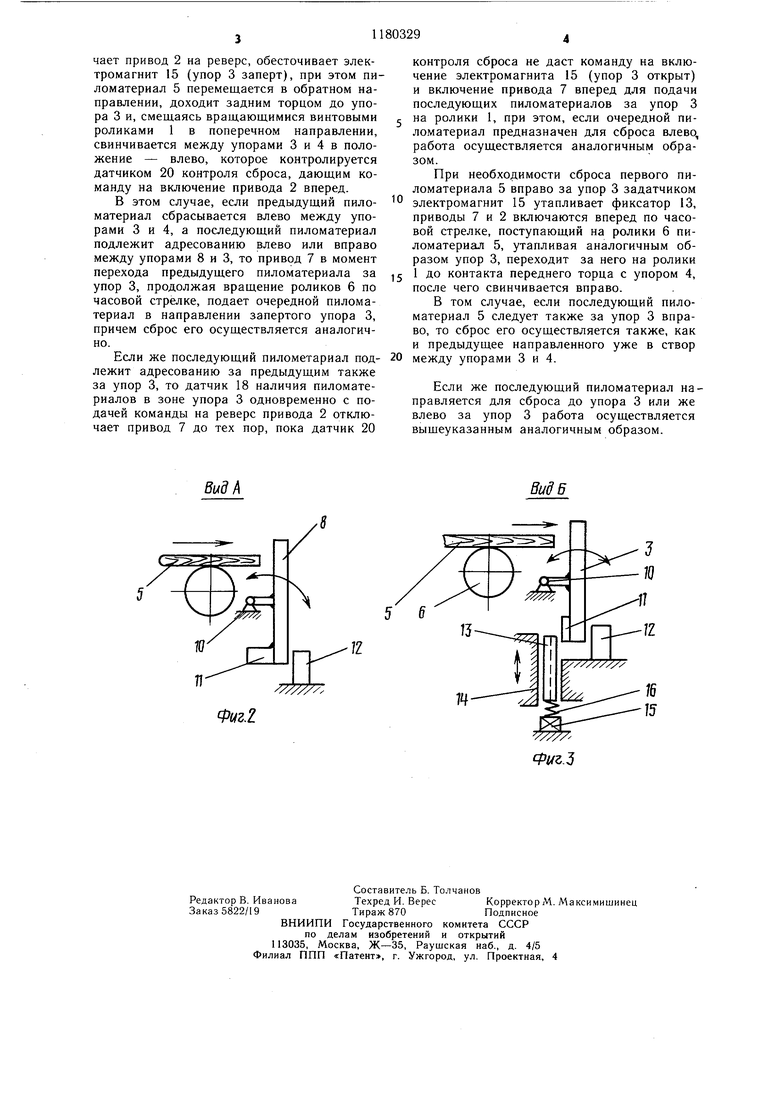
со Изобретение относится к внутризаводскому транспорту и может быть использовано, например, для подачи пиломатериалов к сортировочным, обрезным и другим станкам. Целью изобретения является расширение функциональных возможностей. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1. Устройство имеет рольганг с винтовыми роликами 1, реверсивным приводом 2 их вращения и утапливающимся упором 3, установленным в начале рольганга на расстоянии от установленного, например, неподвижно в конце рольганга упора 4 больщим длины транспортируемого рольгангом груза 5. Перед установленным в начале рольганга упором 3 установлен приемный дополнительный реверсивный рольганг с винтовыми роликами 6 и индивидуальным приводом 7 их вращения. Перед роликами 6 установлен дополнительный утапливающийся упор 8. Расстояние между упорами 3 и 8 больше длины груза 5. Приводы 2 и 7 связаны с винтовыми роликами 1 и 6 посредством цепных передач 9. Упоры 3 и 8 выполнены утапливающимися, поворотными относительно горизонтальных, установленных ниже рольганга, осей 10, снабжены противовесами 1 и неподвижными стопорами 12 их вертикальных положений, установленными, например, за упорами 3 и 8, ниже осей -10. Упор 3 имеет подвижный фиксатор 13, например, установленный по другую сторону упора 3, оппозитно стопору 12, Фиксатор 13 установлен в вертикальных напраЕ ляющих 14 и имеет привод его возвратно-поступательного перемещения по вертикали, например, в виде электромагнита 15 с пружиной 16 возврата. Упор 8 также может быть выполнен с подвижным фиксатором 13, а упор 4 может быть также утапливаемым стопором 12 или стопором 12 и фиксатором 13 в зависимости 01 функционального назначения устройства. Устройство имеет изБест1 ыс средства управления, например, в виде задатчика ре жима работы (не показано), кнопок на пульте дистанционного управления или средств автоматического управления в виде датчиков 17 и 18 наличия пиломатериалов в зоне упоров, датчиков 9 и 20 контроля сброса, связанных с задатчиком и приводами 7, 2 и 15 с помощью известных управляющих элементов и известным способо.м. Устройство работает следующим образом. В исходном положении электромагнит 15 обесточен, пружина 16 возврата фиксатора 13 находится в верхнем положении, упор 3 заперт. 1 92 При подаче груза, например пиломатериала 5, роликами 6 прямо вперед, последний при контакте его переднего торца с упором 8 поворачивает его по часовой стрелке на оси 10, утапливает его ниже верхнего уровня роликов 6 рольганга, не мещая продольному перемещению пиломатериалов 5. После прохода заднего торца пиломатериала 5 через упор 8 последний под действием противовеса против часовой стрелки вокруг оси 10 возвращается в исходное вертикальное положение и удерживается в нем стопором 12. Дальнейщее продвижение пиломатериала определяется оператором посредством задатчика режима работы. В случае, если необходим сброс пиломатериала в поперечном направлении, например вправо, сразу за упором 8, привод 7 продолжает врчдать ролики 6 по часовой стрелке, электромагнит обесточен, т.е. упор 3 заперт фиксагором 13, выдвинутым из направляющих 14 под действием пружины 16 (привод 2 отключен). Пиломатериал 5 в этом случае продолжает свое движение к упору 3 и, дойдя до него, смещается вращающимися по часовой стрелке винтовыми роликами 6 в поперечном направлении до полного свинчивания его с рольганга вправо. Если очередной пиломатериал имеет то же адресование, то работа указанных элементов устройства повторяется. При необходимости сброса пиломатериала 5 влево за упор 8 посредством задатчика упор 3 остается запертым (электромагнит 15 обесточен), привод 2 от ключей, привод 7 подготавливается к переключению на реверс и к нему подключается датчик 17 наличия пиломатериала в зоне упора 8. При проходе пиломатериалом 5 упоров 8 датчик 17 переключает привод на реверс, обеспечивая вращение роликов 6 против часовой стрелки. Пиломатериал 5 начинает перемещаться в обратном направлении и при контакте его заднего торца с упором 8 свинчивается роликами 6 в противоположном первому поперечном направлении влево, после чего датчик 19 контроля сброса переключает привод 7 вперед, т. е. если очередной пиломатериал 5 имеет то же адресование или адресование вправо за упор 8, то он подается за упор 8 только после сброса соответственно предыдущего пило.матернала влево, между упорами 8 и 3. При необходимости адресования пиломатериала 5 влево за упор 3 задатчиком включаются приводы 7 и 2 вперед и электромагнитом 15 утапливается фиксатор 13 и подготавливается к включению датчик 18 наличия пиломатериала в зоне упора 3, при этом пиломатериал 5, двигаясь вперед, переходит с роликов 6 на ролики 1, утапливает упор 3. Как только упор 3 освободится от пиломатериала 5, датчик 18 переключает привод 2 на реверс, обесточивает электромагнит 15 (упор 3 заперт), при этом пиломатериал 5 перемещается в обратном направлении, доходит задним торцом до упора 3 и, смещаясь вращающимися винтовыми роликами 1 в поперечном направлении, свинчивается между упорами 3 и 4 в положение - влево, которое контролируется датчиком 20 контроля сброса, дающим команду на включение привода 2 вперед.
В этом случае, если предыдущий пиломатериал сбрасывается влево между упорами 3 и 4, а последующий пиломатериал подлежит адресованию влево или вправо между упорами 8 и 3, то привод 7 в момент перехода предыдущего пиломатериала за упор 3, продолжая вращение роликов 6 по часовой стрелке, подает очередной пиломатериал Б направлении запертого упора 3, причем сброс его осуществляется аналогично.
Если же последующий пилометариал подлежит адресованию за предыдущим также за упор 3, то датчик 18 наличия пиломатериалов в зоне упора 3 одновременно с подачей команды на реверс привода 2 отключает привод 7 до тех пор, пока датчик 20
контроля сброса не даст команду на включение электромагнита 15 (упор 3 открыт) и включение привода 7 вперед для подачи последующих пиломатериалов за упор 3 на ролики 1, при этом, если очередной пило.материал предназначен для сброса влево, работа осуществляется аналогичным образом.
При необходимости сброса первого пиломатериала 5 вправо за упор 3 задатчиком
электромагнит 15 утапливает фиксатор 13, приводы 7 и 2 включаются вперед по часовой стрелке, поступающий на ролики 6 пиломатериал 5, утапливая аналогичным образом упор 3, переходит за него на ролики
1 до контакта переднего торца с упором 4, после чего свинчивается вправо.
В том случае, если последующий пиломатериал 5 следует также за упор 3 вправо, то сброс его осуществляется также, как и предыдущее направленного уже в створ
между упорами 3 и 4.
Если же последующий пиломатериал направляется для сброса до упора 3 или же влево за упор 3 работа осуществляется вышеуказанным аналогичным образом.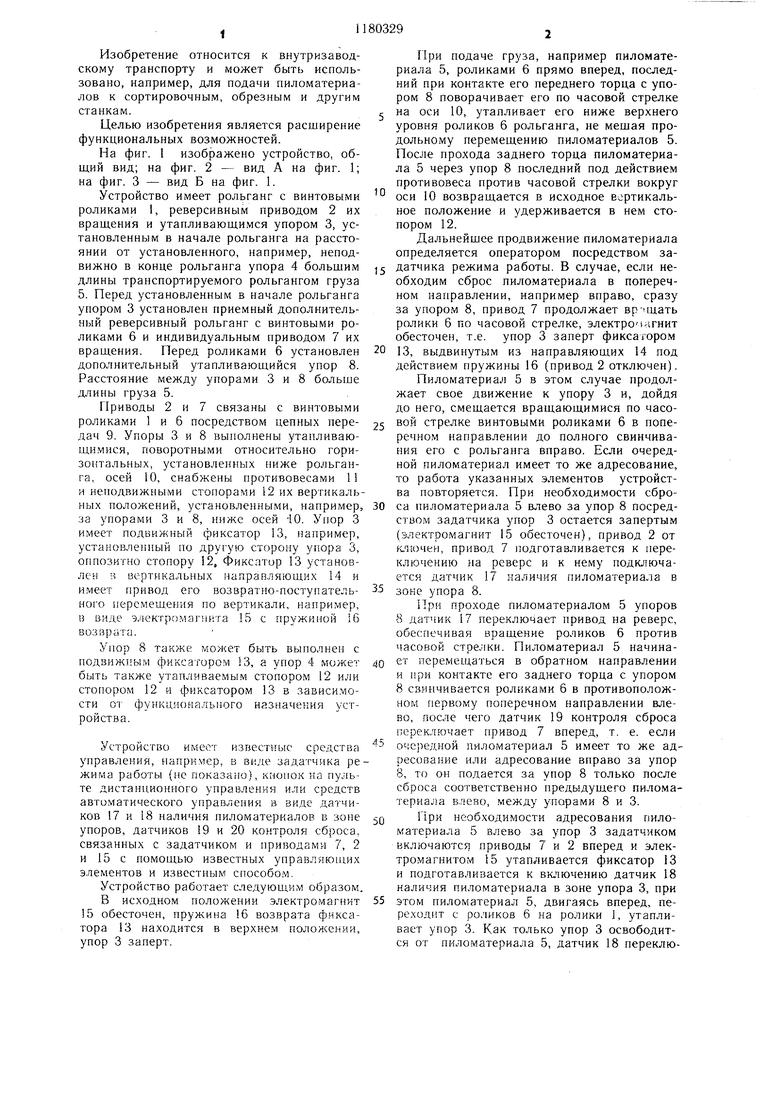
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изменения направленияпОдАчи пилОМАТЕРиАлОВ | 1976 |
|
SU823247A1 |
| Устройство для изменения направления движения длинномерных грузов | 1975 |
|
SU624832A1 |
| Перегружатель пиломатериалов | 1986 |
|
SU1373650A2 |
| Перегружатель пиломатериалов | 1982 |
|
SU1070091A1 |
| Рольганг-разделитель | 1978 |
|
SU774997A1 |
| Перегружатель материалов | 1983 |
|
SU1161442A1 |
| Транспортное средство | 1977 |
|
SU671173A1 |
| Перегружатель материалов (его варианты) | 1983 |
|
SU1093659A1 |
| Перегружатель пиломатериалов | 1983 |
|
SU1111961A2 |
| Рольганг-разделитель | 1977 |
|
SU691361A1 |
1. УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ ДЛИННОМЕРНЫХ ГРУЗОВ по авт. св. № 624832, отличающееся тем, что, с целью расширения его функциональных возможностей, оно снабжено установленным перед основным утапливающимся упором дополнительным приводным реверсивным рольгангом с винтовыми роликами и установленным перед ним дополнительным утапливающимся упором, а основной утапливающийся упор снабжен приводным фиксатором. 2. Устройство по п. 1, отличающееся тем, что оно имеет датчики наличия грузов в зоне утапливающихся упоров, установленные перед приводными реверсивными рольгангами и датчиками контроля сброса грузов с приводных реверсивных рольгангов, связанных с приводами последних и приводом приводного фиксатора.
| Устройство для изменения направления движения длинномерных грузов | 1975 |
|
SU624832A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
