;1Изобретение относится к машино- етроенню, а именно к манипуляторам с программиьм управлением, и предназначено для механизации и автоматизации Основных и вспомогательных операций Э промьгашенности.
Целью изобретения является расширение технологических возможностей за счет обеспечения возможности позици- Онирования исполнительного органа в любой точке рабочей зоны манипулятора и повышение надежности его работы,,
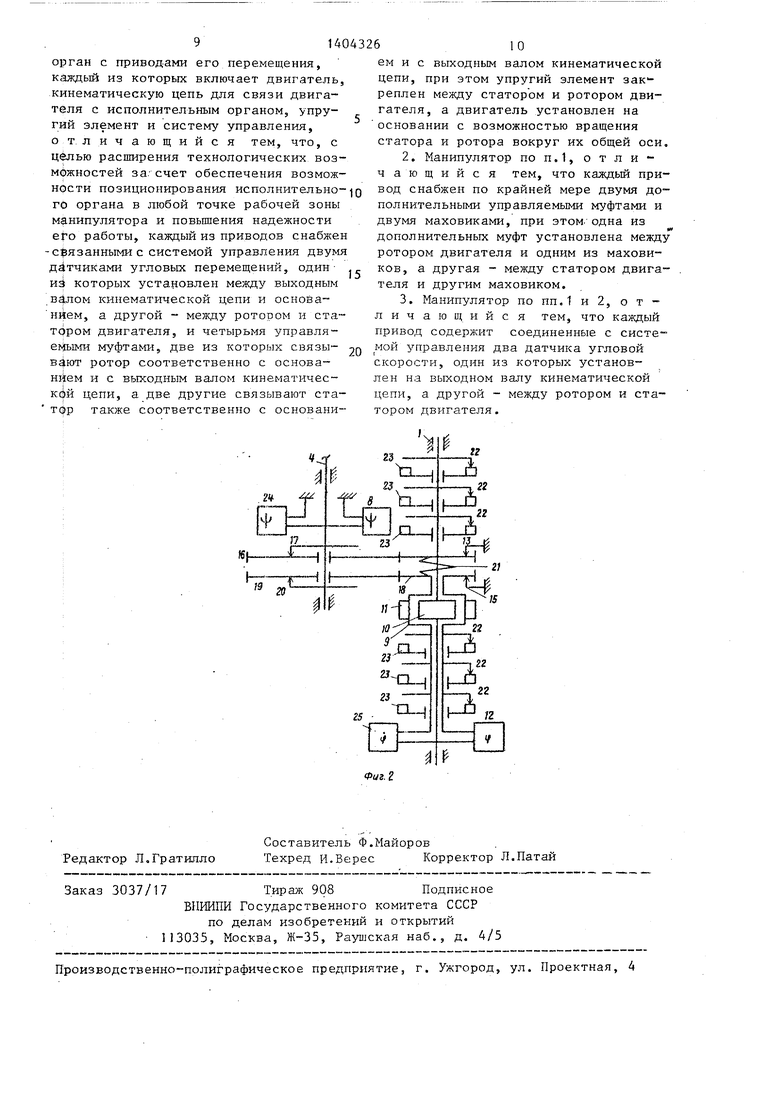
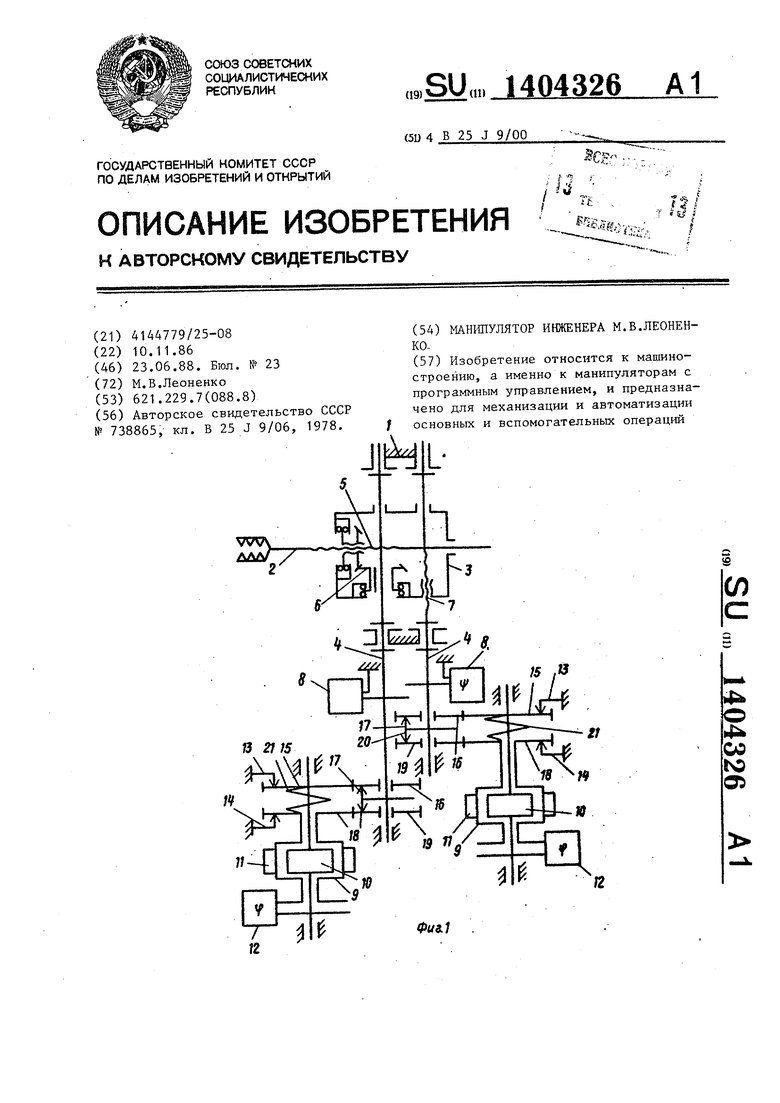
На фиг.1 изображена кинематическая схема манипулятора; на фиг.2 - схема части кинематической цепи с датчиками УГЛОВОЙ скорости и махдвиками.
Манипулятор содержит смонтированны на основании 1 звенья 2 и 3 исполнительного органа. Звено 2 связано с выходным валом 4 одного из приводов перемещения исполнительного органа через передачу 5 и 6. Звено 3 связано с аналогичньш вьжодным валом 4 второго привода через передачу 7. Первый привод служит для горизонтального перемещения звена 2, второй - для вертикального перемещения звена 3. У каждого привода между выходным валом 4 и основанием 1 установлен датчик 8 угловых перемещений. Кроме того, каждый из приводов включает двигатель 9, установленный на основании с возможностью независимого вращения ротора ТО и статора 11 вокруг их общей оси. Между ротором 10 и статором 11 установлен датчик 12 угловых перемещений. Между ротором 10 и основанием 1 установлена управляемая муфта 13, между статором 11 и основанием 1 - управляемая муфта 14.
Ротор 10 связан с выходным валом 4 посредством зубчатых колес 15 и 16 и управляемой муфты 17. Статор 11 связан с выходным валом 4 посредством зубчатых колес 18 и 19 и управляемой муфты 20. Между ротором 10 и статором 11 установлена пружина 21 кручения. Датчики 8 и 12, управляемые муфты 13, 14, 17 и 20, двигатель 9 связаны с системой управления (не показана) .
Устройство можеттакже содержать дополнительные управляющие муфты 22, соединяющие маховики 23 с ротором 10 и статором 11 двигателей, и, кроме того датчики 24 и 25 угловых скоростей, установленные соответственно между выходным валом 4 и основанием 1 и между ротором 10 и статором 11.
Манипулятор работает следующим образом.
В исходном положении ротор 10 повернут относительно статора 11, на« пример по часовой стрелке на угол ц t|), , от свободного состояния пружины 21 кручения. При включении системы управления датчики 8 и 12 угловых перемещений вырабатывают злектри- ческие сигналы, которые соответствуют измеренным датчиками значениям углов
f, , Ч fi Сигналы С); и Ц) поступают с датчиков в систему управления.
Возможно несколько способов управления устройством.
По первому способу, если от системы управления поступят управляющие сигналы и выключить муфты 20 и 13, то пружина 21 кручения начнет вращать расфиксированный ротор 10 против часовой стрелки. Вращение от ротора 10 передается через зубчатые колеса 15 и 16 и муфту 17 на выходной вал 4. Выходной вал 4 вращается по часовой стрелке и через передачи 6 и 5 перемещает в горизонтальном направлении, например вправо, звено 2. Кроме того, одновременно с выключением муфт 20 и 13 система управления включает двигатель 9 таким образом, что его крутящий момент совпадает с направлением вращения ротора 10. Пружина раскручивается до свободного состояния, т.е. Ср О, разогнав связанную с ней кинематическую цепь с элементами 10, 15, 16, 17, 4, 6,5и2до максимальной скорости. Затем эта кинематическая цепь, двигаясь по инерции, закручивает пружину 21 на угол ц -tf, и при достижении этого равенства сигналы системы управления включают муфты 13 и 20 и выключают двигатель 9. Двигатель 9 используется только для восполнения потерь энергии.
звено 2. В итоге получаются углы перемещения Ср - V V звено 2 переместится в обратном направлении на такую же величину, как и в первом случае. Двигатель 9 и в этом случае используется только для восполнения потерь энергии.
По третьему способу, если в мани-
0 пулятор, находящийся в исходном состоянии (q cfi и 9 ср, ), от системы управления поступят управляющие сигналы и выключат муфты 20 и 14, то пружина 21 кручения начнет вращать
5 расфиксированный статор 11 по часовой стрелке и приведет в движение связанную с ним кинематическую цепь с элементами 18 и 19. Одновременно система управления включает двигатель 9 таким
0 образом, что его крутящий момент совпадает с направлением вращения статора. В момент, когда значение сигнала ср станет равно Q) ср, М, (М - некоторый коэффициент, причем О М ёг 1) ,
5 сигнал системы управления выключит муфту 13. Пружина 21 начнет вращать расфиксированньп ротор 10 против часовой стрелки и приводит в движение связанную с ним кинематическую цепь
0 с элементами 15, 16, 17, 4, 6, 5 и 2. Пружина 21 разгоняет эту кинематическую цепь до момента, когда ср О, сообщив ей некоторый импульс силы. Далее, когда значение угла Ср изменяет
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКАЯ ГЕНЕРАТОРНАЯ СИСТЕМА С ЭЛЕКТРОМАГНИТНЫМ ВСПОМОГАТЕЛЬНЫМ СИЛОВЫМ БЛОКОМ | 2012 |
|
RU2583180C2 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| Манипулятор с программным управлением | 1978 |
|
SU733975A1 |
| Система дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством | 2023 |
|
RU2809164C1 |
| Привод кривошипного пресса | 1978 |
|
SU753677A1 |
| ИНЕРЦИОННЫЕ ДВИГАТЕЛЬ КОМБИНИРОВАННЫЙ, ЭЛЕКТРОДВИГАТЕЛЬ И ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2156870C2 |
| Устройство для намотки нити на оправку | 1980 |
|
SU1002218A2 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| МУФТА КРИВОШИПНО-ШАТУННОГО ПРЕССА | 2010 |
|
RU2504475C2 |
Кинематическая цепь совершает ма- ся от (j - О ц,о ( - -f М, кинематиче- ятниковое движение и в момент вклю- екая цепь с элементами 10, 15, 16, чения муфт, т.е. фиксации кинемати- 17, 4, 6, 5 и 2 получает от пружины ческой цепи, скорости перемещений 21 такой же импульс силы, действую- всех звеньев кинематической цепи ран- щий в обратном направлении. В момент, ны нулю и, следовательно, нет необ- 40 когда наступит равенство tp -q,-М, ходимости гасить кинетическую энергию кинематической цепи. Таким образом, ротор 10, выходной вал 4 и звено 2 зафиксированы относительно основания с углами поворота ц и tp if .
По второму способу управления, есскорости перемещении всех элементов этой кинематической цепи будут равны нулю, и в этот же момент сигнал системы управления включит муфту 13. Ротор 45 10 и кинематическая цепь с элементами 15, 16, 17, 4, 6, 5 и 2 будут зафик-, сированы относительно основания 1.
ли в манипулятор, находящийся в ис- ходком состоянии, ( и 9i) от системы управления поступят управ-
ляющие сигналы и выключат муфты 17 и 14, то произойдут процессы, аналогичные процессам, возникающим в первом случае, только вращаться теперь будет статор 11 по часовой стрелке. Вращение от статора 11 передается че- рез зубчатые колеса 18 и 19 и муфту 20 на выходной вал 4. Выходной вал 4 вращается против часовой стрелки и соответственно перемещается влево
ся от (j - О ц,о ( - -f М, кинематиче- екая цепь с элементами 10, 15, 16, 17, 4, 6, 5 и 2 получает от пружины 21 такой же импульс силы, действую- щий в обратном направлении. В момент, когда наступит равенство tp -q,-М,
скорости перемещении всех элементов этой кинематической цепи будут равны нулю, и в этот же момент сигнал системы управления включит муфту 13. Ротор 10 и кинематическая цепь с элементами 15, 16, 17, 4, 6, 5 и 2 будут зафик-, сированы относительно основания 1.
Статор 11 продолжает вращаться по часовой стрелке, закручивая пружину 21 от угла cf -Cf,-Мдо угла q) -ср,. За время разгона статора 11 от угла С| Ц), до угла С О статор 11 и связанная с ним кинематическая цепь с элементами 18 и 19 получают от пружины 21 некоторый импульс силы. За время замедления движения статора 11 от угла ср О до угла Cji - Ср, статор 11 и связанная с ним кинематическая цепь получают от пружины 21 та51А
кой же импульс силы, действующий в обратном направлении. В момент, когда угол Cf -Cf,, скорость движения статора будет равна нулю и в этот же мо- мент сигналы системы управления включают муфты 14 и 20 и выключают двигатель 9. Двигатель 9 используется только для восполнения потерь энергии.
В итоге получают следующие углы пере-10 цепь с элементами 18 и 19. Пружина 21 мещения Ср Cf, , ф у .
Перемещение исполнительного звена 2 и соответствующее ему угловое перемещение ( V, выходного вала 4 зависят от соотношения момента инерции Кинематической цепи с элементами 10, 15, 16, 17, 4, 6, 5 и 2, приведенного к ротору, и момента инерции кинематической цепи с элементами 11, 18
разгонит эту кинематическую цепь до момента, когда ср О, сообщив ей некоторый импульс силы. Далее, когда значение угла (| изменяется отС - О 15 ДО Cf -cpi M, кинематическая цепь с элементами 11, 18 и 19 получит от пружины 21 такой же импульс силы, действующий в.обратном направлении. В момент, когда значение угла ср стай 19, приведенного к статору, а также 20 нет равным tp -ср, М, скорости пере6т величины М. Изменяя М в пределах О М ё-1, ползгчаем сколь угодно большое число перемещений звена 2 и угло- вых перемещений (jj,- QJ, в некотором Диапазоне.25
Но четвертому способу в манипулятор, находящийся в исходном состоянии (, , ), от системы управления поступают управляющие сигналы И выключают муфты 13 и 17, включают зо двигатель 9 согласно с направлением вращения ротора. Затем в момент, когда значение угла (f станет равно q iCfl, М, сигнал системы управления вы- кшючит муфту 14. В момент, когда значение сигнала ср -tf-М, сигнал системы управления включает муфту 14. В момент, когда значение угла cf равно -ср,j сигналы системы управления
мещений всех звеньев кинематической цепи с элементами 11, 18 и 19 равны нулю и в этот же момент сигнал системы управления включит муфту 14. Статор 11 и кинематическая цепь с элементами 18 и 19 зафиксированы относительно основания. Ротор 10 продолжает вращаться против часовой стрелки, закручивая пружину 21 от угла С| . -cpj М. до угла СР -ср,. За время разгона ротора 10 от угла Cf tp, до угла Cf О ротор 10 и связанная с ним кинематическая цепь с элеме нтами 15, 16, 17, 4, 6, 5 и 2 получают от пружины 21 некоторый импульс силы. За время замедления движения ротора 10 от угла ср О до угла ср -Ц,, ротор 10 и связанная с ним кинематическая цепь с элементами 15, 16, 17, 4,
включат муфты 13 и 17 и выключат 6, 5 и 2 получают от пружины 21 такой гатель 9. В итоге получены следующие углы перемещения C( -Cf, ис(5.
случае происходят процессы, аналогичные процессам в предыдущем
же импульс силы, действующий в обратном направлении. В момент, когда значение угла СР будет равно q -Cf,, скорость движения ротора 10 станет равна нулю и в этот же момент сигналы системы управления включают муфты 13 и 20 и выключают двигатель 9. Двигатель 9 используется только для восполнения потерь энергии. В итоге получены углы перемещения ср - Ср, и
случае, только перемещение CiPj - ф, и звена 2 направлены в обратную сторону.
По пятому способу, если в манипулятор, находящийся в исходном состоянии Ср ср, и ( qj, , от системы управления поступят управляющие сигналы и выключат муфты 13 и 20, то пружина 21 кручения начнет вращать расфиксированный ротор 10 против часовой стрелки и приведет в движение связанную с ним кинематическую цепь с элементами 15, 16, 17, 4, 6, 5 и 2. Одновременно система управления включает двигатель 9 таким образом, что его
крутящий момент совпадает с направлением вращения ротора. В момент, когда значение сигнала ср станет равно ср ср,- М, сигнал системы управления выключит муфту 14. Пружина 21 начинает вращать расфиксированный статор 11 по часовой стрелке и приведет в движение связанную с ним кинематическую
цепь с элементами 18 и 19. Пружина 21
цепь с элементами 18 и 19. Пружина 21
разгонит эту кинематическую цепь до момента, когда ср О, сообщив ей некоторый импульс силы. Далее, когда значение угла (| изменяется отС - О ДО Cf -cpi M, кинематическая цепь с элементами 11, 18 и 19 получит от пружины 21 такой же импульс силы, действующий в.обратном направлении. В момент, когда значение угла ср стамещений всех звеньев кинематической цепи с элементами 11, 18 и 19 равны нулю и в этот же момент сигнал системы управления включит муфту 14. Статор 11 и кинематическая цепь с элементами 18 и 19 зафиксированы относительно основания. Ротор 10 продолжает вращаться против часовой стрелки, закручивая пружину 21 от угла С| . -cpj М. до угла СР -ср,. За время разгона ротора 10 от угла Cf tp, до угла Cf О ротор 10 и связанная с ним кинематическая цепь с элеме нтами 15, 16, 17, 4, 6, 5 и 2 получают от пружины 21 некоторый импульс силы. За время замедления движения ротора 10 от угла ср О до угла ср -Ц,, ротор 10 и связанная с ним кинематическая цепь с элементами 15, 16, 17, 4,
6, 5 и 2 получают от пружины 21 такой
же импульс силы, действующий в обратном направлении. В момент, когда значение угла СР будет равно q -Cf,, скорость движения ротора 10 станет равна нулю и в этот же момент сигналы системы управления включают муфты 13 и 20 и выключают двигатель 9. Двигатель 9 используется только для восполнения потерь энергии. В итоге получены углы перемещения ср - Ср, и
ФбПо аналогии с третьим случаем, изменяя М в пределах , получим сколь угодно большое число перемещений звена 2 и угловых перемещений f g Vf в некотором диапазоне.
По шестом способу в манипулятор, находящийся в исходном состоянии (ср i4 i и Cf (у, ), от системы управления поступают управляющие сигналы и выключают fyфты 14 и 17, включают двигатель 9 согласно с направлением вращения статора. Затем в момент, когда значение угла Ц) станет равно С{| М, сигнал системы управления выключает муфту 13. В момент, когда значение угла ( -Cf, М, сигнал системы управления включает муфту 13. В момент когда значение угла qj -ср,, сигналы- системы управления включают муфты 14 и 17 и выключают двигатель 9. В итоге получены перемещения qi
С|,
V т
В этом случае происходят процессы аналогичные процессам в предыдущем случае, только перемещения звена 2 и С{) - ( направлены в обратную сторону.
Таким образом в этих способах из исходного положения, т.е. Q) Ц), , ( ( , выходной вал 4 и звено 2 могут переместиться одним маятниковым движением в любую позицию рабочего диапазона.
В качестве исходного может быть выбрано положение, при котором Ц) -tfi , C|J ф, , при этом выходной вал 4 и звено 2 могут перемещаться одним маятниковым движением в любую позици в пределах того жр самого диапазона.
Таким образом, в любой из позиций звена 2 угол ср равен Cf, или -Cf,. Пр использовании дополнительных управляемых муфт 22 с маховиками 23 манипулятор работает следующим образом.
В исходном положении муфты 22 - включены. При вращении ротора 10 или статора 11 маховики 23 увеличивают моменты инерции кинематических цепей, совершающих маятниковое движение. В результате увеличивается врем перемещения или уменьшается скорость перемещения. Если от системы управления поступают управляющие сигналы, которые выключают некоторые из муфт 22, то скорость перемещения возрастает в соответствии с уменьшившимся моментом инерции.
Кроме того, возможен и другой способ управления манипулятором.
В исходном положении муфта 22 включена, т.е. к ротору 10 подсоединен маховик 23. Начинается перемещение аналогично рассмотренным случаям. В момент, когда величина угла Cf станет равна ер 9 Н. (Н - некоторый коэффи0
5
0
5
циент, причем ), сигнал системы управления выключит муфту 22. Маховик 23 продолжает вращаться по инерции с некоторой угловой скоростью G3. Ротор 10 продолжает двигаться с ускорением до угла q О, а затем с замедлением до угла С -Cf, Н. В момент, когда величина угла Hf станет равна ср -Cf,-H, угловая скорость ротора 10 станет равной СЗ , сигнал системы управления включит муфту 22.
Маховик 23 опять вращается совместно с ротором 10. В этом случае скорость перемещения возрастет, причем на среднем участке перемещения. При изменении Н от пуля до единицы происходит увеличение участка перемещения с большей скоростью.
Если для муфт 22 заданы разные значения Н, то получится сложное движение звена 2.
Перемещение звена 3 происходит аналогично перемещению звена 2. Если одновременно совершать сложные дв1гжения звеньев 2 и 3, то можно получить разнообразные TpaeKTopiiH движения исполнительного органа.
При использовании датчиков 24 и 25 угловой скорости система управления получает дополнительно электрические сигналы соответственно ( и if , кото -,. рые соответствуют измеренным датчиками значения м угловых скоростей ( и tf. Сигналы, ср в совокупности с сигналами , Ср позволяют системе управления в самом начале перемещения опре- , делить соотношение момента инерции неизвестного груза, перемещаемого манипулятором, с моментом инерции кинематических цепей манипулятора и благодаря этому определить величины коэффициентов М, Н для точного выполнения заданного перемещения. Кроме того, сигналы ф, 1| в совокупности с сигналами if, позволяют системе управления более точно дозировать энергию двигателю 9 для восполнения потерь энергии манипулятора.
В зависимости от требуемых степеней свободы исполнительного органа манипулятор может иметь необходимое число его приводов, имеющих аналогичную конструкцию.
0
5
0
5
0
55 Формула изобретения
орган с приводами его перемещения, каждый из которых включает двигатель, кинематическую цепь для связи двигателя с исполнительным органом, упругий элемент и систему управленрш, отличающийся тем, что, с цфлью расширения технологических возможностей за.-счет обеспечения возможности позиционирования исполнительного органа в любой точке рабочей зоны манипулятора и повышения надежности его работы, каждый из приводов снабжен -связанными с системой управления двумя датчиками угловых перемещений, один- и которых установлен между выходным .в4лом кинематической цепи и основа- нйем, а другой - между ротором и статором двигателя, и четырьмя управля- е 4ь1ми муфтами, две из которых связы- в4ют ротор соответственно с основанием и с выходным валом кинематической цепи, а две другие связывают статор также соответственно с основани
д
0
ем и с выходным валом кинематической цепи, при этом упругий элемент реплен между статором и ротором двигателя, а двигатель установлен на основании с возможностью вращения статора и ротора вокруг их общей оси,
;.
