(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1982 |
|
SU1110623A1 |
| Манипулятор с цикловым управлением | 1983 |
|
SU1110624A2 |
| Модуль манипулятора | 1991 |
|
SU1799725A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Многопозиционный манипулятор | 1987 |
|
SU1502293A1 |
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Модуль манипулятора | 1991 |
|
SU1798177A1 |
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
АВТОМАТИЧЕСКИЙ МАНИПУЛЯТОР С ЩКПОВЫМ УПРАВЛЕНИЕМ по авт. св. № 1110623, отличающийся тем, что, с целью повьшения долговечности, он снабжен задатчиками напряжения двигателей, каждый из которых выполнен в виде потенциометра, корпус и вал которого связаны с соответствующими упорами-фиксаторами, неподвижные контакты соединены с источником стабилизированного напряжения, а подвижный и один из неподвижньк контактов - с двигателем постоянного тока.
ел
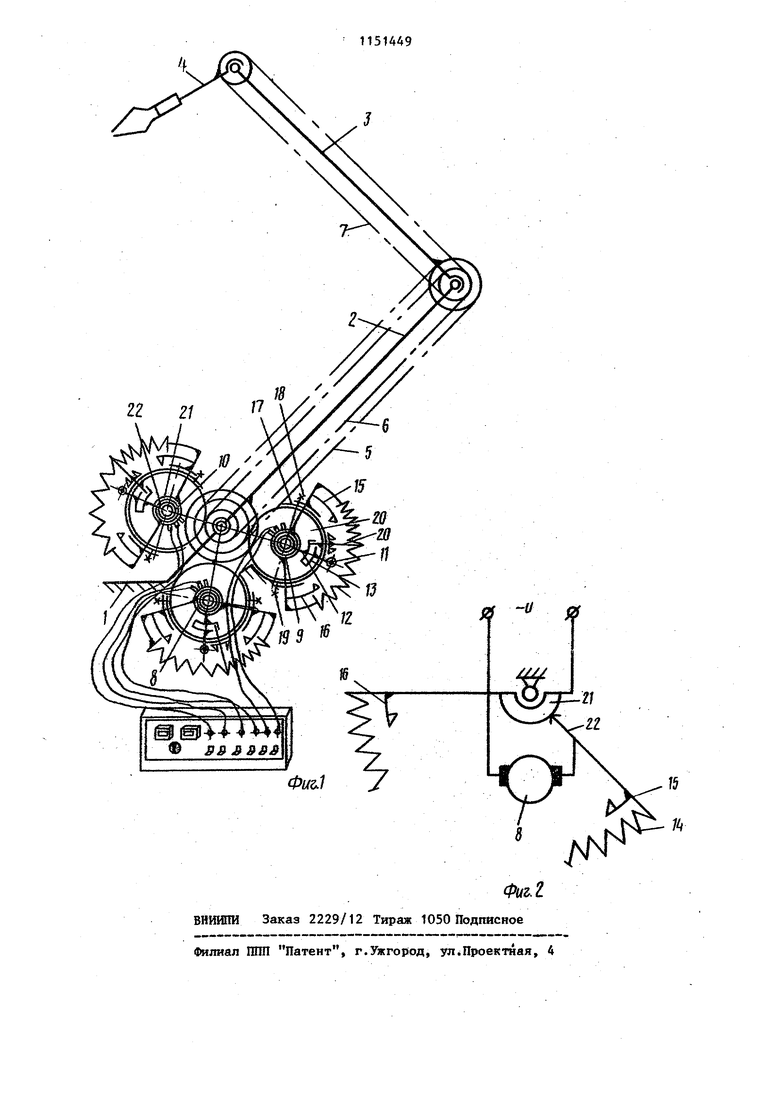
4 со Изобретение относится к машиностроению, а именно к манилуляторостроению, и предназначено для усовер шенствования автоматических манипуляторов, используемых для автоматиза1Ц1И основных и вспомогательных операций. По основному авт. св. W 1110623 известен манипулятор с цикловым управлением, который содержит основание, шарнирно соединенные звенья, индивидуальные двигатели постоянного тока для привода каждого звена, источник стабилизированного напряжения, приводные кинематические цепи и аккумуляторы механической энергии выполненные в виде упругих элементо и программно-управляемые упоры-фикс торы с механизмом их перемещения. Приводом механизма перемещения программно-управляемых упоров-фиксатор какого-либо из аккумуляторов механи ческой энергии является индивидуаль ный привод соответствующего звена. При этом управление упоров-фиксаторов и подкачка энергии в систему по каждой степени подвижности осут;ест вляется от одного двигателя. При включении двигателя сначала происхо дит освобождение фиксатора, система начинает движение под действием потенциальной энергии аккумулятора, а двигатель подкачивает в систему энергию, необходимую для компенсаци потерь на трение lj. Недостатком известного устройств является то, что выбор двигателя и передаточного числа редуктора осуществляется в этом случае по величи не максимального перемещения каждой степени подвижности руки, поэтому при уменьшении величины перемещения вклад энергии в систему при таком выборе двигателя повьшает потери. Это приводит к перерегулированию и к ударам об упоры, что снижает долговечность устройства и надежность его работы. Цель изобретения - повьшение дол говечности конструкции и надежности Поставленная цель достигается тем, что автоматический манипулятор с цикловым управлением снабжен задатчиками напряжения двигателей, ка дый из которых вьтолнен в виде потeнциoмeтpaj корпус и вал которого связаны с соответствующими упорамификсаторами, неподвижные контакты 492 соединены с источником стабилизированного напряжения, а подвижный и один из неподвижных контактов - с двигателем постоянного тока. На фиг. 1 представлена кинематическая схема манипулятора; на фиг.2 принципиальная схема установки потенциометра и его электрического соединения с источником питания и двигателем. Манипулятор содержит цепь шарнирно соединенных с основанием 1 и между собой звеньев 2-4, приводные цепи 5-7, вьтолненные в виде гибких звеньев, например тросов, индивидуальные дригатели 8-10 постоянного тока звеньев 2-4 соответственно, на выходных валах которых закреплены ролики 11 и штанги 12. На штанге 12 с возможностью регулирования положения установлена вилка 13. Аккумуляторы механической энергии выполнены, например, в виде пружин 14. Регулируеьй,1е упоры-фиксаторы 15 и 16 крепятся к направляющей 17 с помощью болтов 18 и 19. Каждая пружина 14концами прикреплена к фиксаторам 15и 16, а средней точкой - к выходному элементу 20 аккумулятора механической энергии. Для удобства монтажа пружина 14 может быть вьшолнена составной, в виде двух идентичных последовательно соединенных упругих элементов. Корпус 21 потенциометра и его вал 22 механически соединены с упорами-фиксаторами 15 и 16, неподвижные выводы соединены с источником стабилизированного напряжения (не показан), а подвижный и один из неподвижных выводов с соответствующим двигателем 8-10 постоянного тока. Автоматический манипулятор с цикловым управлением работает следующим o6pa3otf. В исходном состоянии руки элемент 20 и ролик 11 находятся на упоре 15. При вращении вала двигателя и соответственно щтанги 12 по часовой стрелке с упором 15 сначала контактирует ролик 11, тем самым снимая с упора 15 выходной элемент 20 аккумулятора механической энергии, который начинает и продолжает движение по часовой стрелке под действием прухины 14 пока не входит в контакт с упором 16. При обратном дви3
жении все повторяется аналогичным образом.
Исходная скорость враще/1ия вала двигателя в несколько раз больше скорости вращения выходного элемента 20 аккумуляторов механической энергии, и штанги 12 при в1)ащении в любую сторону всегда опережают его. Положение вилки 13 на штанге 12 определяет угловой зазор между штангой 12 Иэлементом 20. Зазор должен быть выбран таким, чтобы в крайних положениях ролик 11 не нарушал взаимодействия выходного элемента 20 и упоров 15 или 16.
Упоры-(ксаторы связаны с конечными выключателями (не показаны), которые отключают двигатель, когда выходной элемент 20 аккумуляторов
51449
механической энергии входит в контакт с упором.
При настройке необходимого угла поворота звена руки вместе с «зм(не5 нием относительного положения упоров-фиксаторов 15 и 16 соответственно изменяют угол меткду валом 22 и корпусом 21 потенциометра, изменяя тем самым момент на валу двигателя.
10 Таким образом, предлагаемое конструктивное вьшолнение манипулятора увеличивает его срок службы и обеспечивает надежность работы за изменения момента индивидуального
5 двигателя при изменении величины перемещения соответствующего звена руки, при этом уменьшается перерегулирование (или перебеги) системы, исключаются удары об упоры, улучшается динамика работы манипулятора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
