(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАКЛОННОЙ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКОЙ
1
изобретение относится к системам управления подъемниками, а именно к системам управления наклонными шахтными подъемными установками с переменным профилем пути и может быть использовано при управлении электроприводом и тормозной системой с быстродействующим исполнительным органом.
Известно устройство управления наклонной шахтной подъемной установкой, содержащее последовательно соединенные устройство задания скорости, узел сравнения действительной скорости с заданной, управляющее устройство, датчик действительной скорости и соединенное с валом подъемной машины программное устройство 1.
Недостатками этого устройства являются необеспечение управления подъемной установкой в аварийных ситуациях и ограничение динамических нагрузок в переходных режимах работы.
Наиболее близким к предлагаемому по технической сущности является устройство управления наклонной щахтной подъемной установкой, содержащее последовательно соединенные датчик положения подъемного сосуда в стволе, блок программ, блокзадания и узел сравнения действительной скорости с заданной, коммутатор, датчик н регулятор скорости, блок управления приводом и тормозную систему 2.
Однако устройство не обеспечивает необходимую плавность движения с ограничением рывка в переходных режимах работы (разгон, замедление), что приводит к значительным динамическим нагрузкам в элементах и узлах подъемной установки.
10 Цель изобретения - повышение надежности путем уменьщения динамических нагрузок.
Цель достигается тем, что устройство снабжено датчиком загрузки подъемного
5 сосуда, датчиком и регулятором ускорения подъемной машины, блоком сравнения и блоком контроля нулевой скорости, вход которого соединен с выходом датчика скорости, а выход-с одним из входов тормозной системы, датчик ускорения соединен с входом
° блока сравнения, два других входа которого соединены соответственно с выходом регулятора скорости и выходом блока задания, датчик загрузки подъемного сосуда соединен с одним из входов блока программ.
вход регулятора ускорения соединен с выходом блока сравнения, а выход соединен с входом коммутатора.
Блок программ выполнен в виде узла задания ускорения, функционального нреобразователя и узла задания рывка, один из входов которого являются соответственно первым, вторым и третьим выходами блока программ, при,этом входы узла задания рывка соединены с выходом узла задания ускорения, а второй - с выходом функционального преобразователя с одним из входов связанного с входом узла задания ускорения, причем вход узла задания ускорения является первым входом блока программ, второЯ вход функционального преобразователя является вторым входом блока программ, выходами которого являются соответственно выходы узла задания ускорения, функционального преобразователя и узла задания рывка.
Кроме того, блок задания выполнен в виде четырех последовательно соединенных операционных усилителей, охваченных общей отрицательной обратной связью блока деления и двух ограничителей напряжения, причем один из входов первого усилителя соединен с выходом блока деления, один из входов которого соединен с выходом третьего и с одним из входов второго усилителей, выходы первого и второго усилителей через ограничители напряжения соединены соответственно с вторыми входами этих же усилителей, а третий вход первого усилителя, вторые входы ограничителей напряжения и блока деления являются входами блока задания, причем первый вход второго усилителя является одним из выходов блока задания, вторым выходом которого является выход четвертого усилителя.
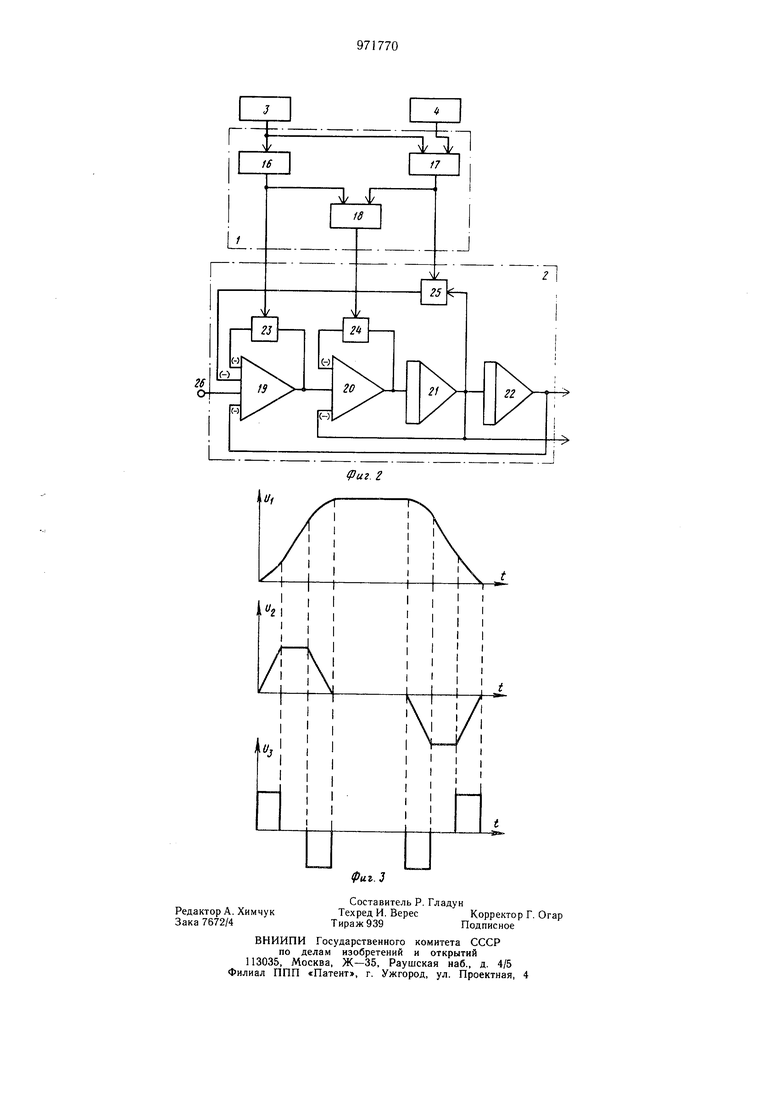
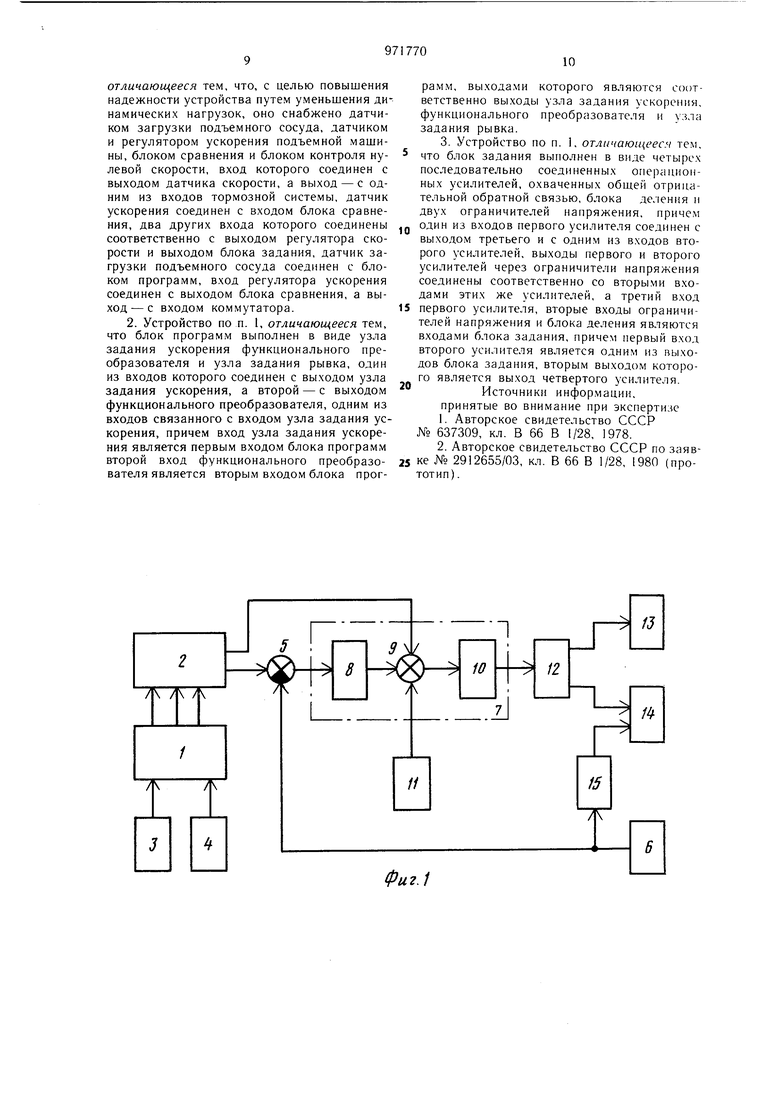
На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2функциональная схема блока программ и блока задания; на фиг. 3 - диаграммы изменения во времени выходных сигналов блока задания.
Устройство содержит блок 1 программ, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами блока задания 2, а первый и второй входы - соответственно с выходами датчика положения подъемного сосуда в стволе 3 и датчика загрузки подъемного сосуда 4. Первый выход блока 2 задания соединен с узлом 5 сравнения действительной скорости с заданной, второй вход которого соединен с датчиком 6 скорости, а выход - с входом регулятора 7 содержит последовательно соединенные регулятор 8 скорости, блок 9 сравнения и регулятор 10 ускорения. Вход регулятора 8 скорости является выходом узла 5 сравнения, а входы блока 9 сравнения соединены соответственно с вторым выходом блока 2 задания, с датчиком ускорения подъемной машины 11
и с выходом регулятора 8 скорости. Выход блока 9 соединен со входом регулятора 10 ускорения, выход которого соединен со входом коммутатора 12, выходы которого соедииены с блоком управления электроприводом 13 и тормозной системой 14. Вход блока 15 контроля нулевой скорости соединен с датчиком 6 скорости, а выход - с вторым входом тормозной системы 14.
Блок 1 программ содержит (фиг. 2) узел
16 задания ускорения, вход которого соединен с датчиком положения подъемного сосуда в стволе 3, функциональный преобразователь 17 угловой частоты, входы которого соединены с датчиком загрузки подъемного сосуда 4 и датчиком положения подъемного
сосуда в стволе 3, узел 18 задания рывка, входы которого соединены с узлом 16 задания ускорения и функциональным преобразователем 17 угловой частоты.
Блок 2 задания состоит из последовательно соединенных операционных усилителей 19-22, которые охвачены общей отрицательной обратной связью. В цепи отрицательной обратной связи усилителей 19 и 20 включены соответственно ограничители 23 и 24 выходного напряжения, поэтому они имеют идеальную релейную характеристику и являются соответственно ограничителями ускорения и рывка. Управляющие входы ограничителей 23 и 24 соединены соответственно с выходами узла 16 задания ускорения и узла 18 задания рывка, которые являются соответственно первым и третьим выходами блока 1 программ. Операционные усилители 21 и 22 и интегрирующие являются соответственно интеграторами ускорения и скорости. Выход первого интегрирующего усилителя
21 соединен отрицательной обратной связью с входом операционного усилителя 20 и с первым входом блока 25 деления, второй вход которого соединен с выходом функционального преобразователя 17 угловой частоты и является вторым входом блока 2
задания. Выход блока 25 деления соединен с входом операционного усилителя 19. Зажим 26 соединен с входом операционного усилителя 19 и является входом блока 2 задания. Выходы интегрирующих усилителей
22 и 21 являются соответственно первым и вторым выходами блока 2 задания.
Устройство работает следующим образом. Перед пуском подъемного двигателя блок
1программ осуществляет настройку блока
2задания. Узел 16 задания ускорения задает опорное напряжение ограничителя 23, величина которого пропорциональна требуемому ускорению ащ подъемной установки при пуске. Для обеспечения плавности процесса пуска и устранения механических колебаний необходимо обеспечить трапецеидальный закон изменения ускорения установки с периодами его нарастания и уменьшения кратными периоду собственных механических колебаний упругой системы. Поэтому на выходе узла 18 задания рывка формируется опорное напряжение ограничителя 24, которое пропорционально требуемой величине рывка о определяемой из соотношения ----г гдеtJ-круговая частота, механических колебаний упругой системы подъемной установки, п 1,2.... Следовательно узел 18 задания рывка содержит блок умножения для реализации указанной зависимости. Сигнал, пропорциональный круговой частоте механических колебаний, поступает на вход узла 18 задания рывка с выхода функционального преобразователя 17 угловой частоты. Функциональный преобразователь 17, в зависимости от принятой модели механический части подъемной установки, реализует функциональную зависимость круговой частоты механических колебаний от длины ветви каната в данной точке ствола, информация о которой поступает с датчика положения подъемного сосуда в стволе 3, и массы концевого груза, которая задается датчиком загрузки подъемного сосуда 4 и для данной операции подъема или спуска является постоянной. Величины, характеризующие упругие свойства каната и приведенную массу вращающихся частей установки без учета навиTorqi на барабан каната являются постоянными для данной установки и вводятся в функциональный преобразователь 17 в качестве постоянных коэффициентов. На другой вход узла 18 задания рывка с выхода узла 16 задания ускорения поступает сигнал, пропорциональный заданной величине ускорения. Блок 2 задания начинает формировать управляющие сигналы при подаче на его входной зажим 26 ступенчатого напряжения Ц, величина которого пропорциональна максимальной зада.нной скорости V . При этом, на выходах операционных усилителей 19 и 20 появляются напряжения, величины которых определяются опорными напряжениями соответственно ограничителей 23 и 2 напряжения и пропорциональны задаваемым ускорению и рывку. Напряжение Uj (фиг. 3) на выходе интегрирующего усилителя 21, который является вторым выходом блока 2 задания, начинает возрастать по линейному закону, программируя требуемую диаграмму ускорения. Напряжение l/i на выходе интегрирующего усилителя 22, который является первым выходом блока 2 задания, возрастает по пароболе, программируя требуемую диаграмму скорости. Так как операционные усилители 20 и 21 охвачены отрицательной обратной связью, то рост напряжения 1/2 на выходе интегрирующего усилителя 21 прекращается когда оно становится равным напряжению на выходе операционного усилителя 19, которое пропорционально задаваемой величине максимального ускорения. Напряжение Uj на выходе операционного усилителя 20, пропорциональное ограничиваемой величине рывка, становится равным нулю. При этом, напряжение на выходе интегрирующего усилителя 22 возрастает по линейному закону, так как на его вход подается постоянное напряжение с выхода операционного усилителя 21. Если сумма напряжений, поступающих по цепям отрицательной обратной связи на вход операционного усилителя 19 с выходов операционного усилителя 22 и блока 25 деления становится равной по абсолютной величине напряжению Ui на зажиме 26, то полярности напряжений на выходах операционных усилителей 19 и 20 изменяются на противоположные. Напряжение на выходе интегрирующего усилителя 21 уменьшается до нуля по линейному закону, а на выходе усилителя 22 - приближается по пароболе к напряжению Оц. Для того, чтобы напряжение 1/2 на выходе интегрирующего усилителя 21 стало равным нулю в тот мо.мент, когда напряжение L/t на выходе интегрирующего усилителя 22 становится равным и1,должны выполняться следующие соотношения V, V зсп., и,„-и,, где V -текущее значение скорости; К - коэффициент пропорциональности; 2т - напряжение, пропорциональное задаваемому ускорению; l/(tj-напряжение, пропорциональное круговой частоте механических колебаний. Напряжения U и l/cj, пропорциональные ускорению и круговой частоте механических колебаний, поступают на входы блока 25 деления соответственно с выходов интегрирующего усилителя 21 и функционального преобразователя 17. Требуемый коэффициент передачи напряжения с выхода блока 25 деления устанавливается резистором на входе операционного усилителя 19. На входы узла 5 сравнения действительной скорости с заданной подаются напряжения с первого выхода блока 2 задания и с датчика 6 скорости, которые пропорциональны соответственно заданной и действительной скоростям подъемной машины. Сигнал ошибки с выхода узла 5 сравнения поступает на регулятор 8 скорости, вход которого является первым входом регулятора 7. Выходной сигнал регулятора 8 скорости подается на первый вход блока 9 сравнения, на второй вход которого с второго выхода блока 2 задания подается сигнал, пропорциональный требуемому ускорению установки, а на третий вход-сигнал с выхода датчика ускорения подъемной машины 11. С выхода блока 9 сравнения на вход регулятора 10 ускорения подается разность заданного и
действительного значений ускорения, а также выходной сигнал регулятора 8 скорости, зависящий от точности воспроизведения заданного закона изменения действительной скорости. Управляющее воздействие с выхода регулятора 10 ускорения через коммутатор 12 нодается в блок управления электроприводом 13, который обеспечивает задаваемый блоком 2 закон изменения скорости и ускорения подъемной машины.
Устройство управления построено по двухканальному принципу, при котором на вход регулятора 10 ускорения подается задающее воздействие как с регулятора 8 скорости,так и непосредственно с второго выхода блока 2 задания. Из-за конечного значения чувствительности реальных элементов устройства, в частности узла 5 сравнения действительной скорости с заданной, возможно искажение закона воспроизведения действительной скорости в моменты плавного нарастания ее заданного значения по параболе. Поэтому наличие задающего воздействия по ускорению, которое подается с второго выхода блока 2 задания, обеспечивает быстродействие системы и точность воспроизведения заданной диаграммы скорости с трапецеидальным законом изменения ускорения. Поскольку время нарастания и уменьшения ускорения при пуске обеспечивается кратным периоду колебаний механической части подъемной установки, то устраняются механические колебания и уменьшаются динамические нагрузки в ее элементах и узлах.
Рабочее торможение подъемной установки осуществляется с использованием электропривода при снятии напряжения с входного зажима 26 блока 2 задания. При этом блок 2 задания настраивается блоком 1 программ аналогично изложенному. Диаграммы напряжений Us, U, Uj на выходах операционных усилителей 20-22 блока 2 задания при снятии входного напряжения с зажима 26 приведены на фиг. 3. Работа блоков и узлов предлагаемого устройства в режиме рабочего торможения аналогична их работе при пуске.
В аварийном режиме устройство управления работает следующим образом.
При поступлении сигнала на предохранительное тор.можение коммутатор 12 переключает выход регулятора 7 с входа блока управления электроприводом 13 на вход тормозной системы 14. Одновременно подъемный электродвигатель отключается от сети и управление подъемной установкой осуществляет тормозная система 14. При этом по выходному сигналу датчика положения подъемного сосуда в стволе 3 узел 16 задания ускорения задает опорное напряжение на ограничитель 23. Причем, величина этого напряжения пропорциональна допустимому замедлению, которое определяется в зависимости от угла наклона участка пути в месте нахождения подъемного сосуда.
Узел 18 задания рывка в зависимости от сигналов на его входах задает опорное напряжение на ограничитель 24 рывка. С зажима 26 снимается входное напряжение. Напряжения и, и Ug. на первом и втором выходах блока 2 задания программируют требуемый закон изменения скорости и ускорения (замедления) при предохранительном торможении. В зависимости от значений выходных сигналов датчика 6 скорости и
датчика ускорения подъемной машины 1 на выходе регулятора 7 формируется управляюш,ее воздействие, которое через коммутатор 12 подается на первый вход тормозной систе,мы 14. Тормозная система 14 не
. обеспечивает требуемую величину замедления подъемной машины. Когда ее скорость становится близкой к нулю блок 15 контроля нулевой скорости выдает управляющее воздействие на второй вход тормозной системы 14. При этом позволяется тормозной
0 момент с учетом коэффициента статической надежности тормоза и установка стопорится. В процессе предохранительного торможения устройство обеспечивает плавное нарастание тормозного усилия, торможение с установившейся величиной тормозного усилителя, его снижение перед стопорением подъемной мащины и надежное стопорение установки. При этом, время нарастания и снижения тормозного усилия обеспечивается кратным периоду колебаний механической части подъемной установки. Благодаря этому динамические нагрузки минимальны.
Применение устройства позволяет повысить надежность работы подъемной установки за счет уменьщения динамических нагрузок в ее узлах и элементах. Больщие динамические нагрузки, особенно в режиме предохранительного торможения наклонных подъемных установок с переменным профилем пути, являются одной из причин частой замены (через 2-3 мес после навески) подъемного каната. Преимуществом предлагаемого устройства является то, что оно обеспечивает управление подъемной установкой во всех режимах ее работы с минимальными динамическими нагрузками. Экономический
5 эффект получается за счет увеличения сроков службы элементов и узлов подъемной установки, а также за счет сокращения количества простоев для замены каната.
Формула изобретения
1. Устройство для управления наклонной шахтной подъемной установкой, содержащее последовательно соединенные датчик положения подъемного сосуда в стволе, блок 5 программ, блок задания, узел сравнения действительной скорости с заданной, коммутатор, датчик и регулятор скорости, блок управления приводом и тормозную систему,
отличающееся тем, что, с целью повышения надежности устройства путем уменьшения динамических нагрузок, оно снабжено датчиком загрузки подъемного сосуда, датчиком и регулятором ускорения подъемной машины, блоком сравнения и блоком контроля нулевой скорости, вход которого соединен с выходом датчика скорости, а выход - с одним из входов тормозной системы, датчик ускорения соединен с входом блока сравнения, два других входа которого соединены соответственно с выходом регулятора скорости и выходом блока задания, датчик загрузки подъемного сосуда соединен с блоком программ, вход регулятора ускорения соединен с выходом блока сравнения, а выход- с входом коммутатора.
2. Устройство по п. 1, отличающееся тем, что блок программ выполнен в виде узла задания ускорения функционального преобразователя и узла задания рывка, один из входов которого соединен с выходом узла задания ускорения, а второй - с выходом функционального преобразователя, одним из входов связанного с входом узла задания ускорения, причем вход узла задания ускорения является первым входом блока программ второй вход функционального преобразователя является вторым входом блока программ, выходами которого являются соответственно выходы узла задания ускорения, функционального преобразовате,пя и узла задания рывка.
3. Устройство по п. 1, отли/ающеес.ч тем, что блок задания выполнен в виде четырех последовательно соединенных операционных усилителей, охваченных общей отрицательной обратной связью, блока деления и двух ограничителей напряжения, причем jj один из входов первого усилителя соединен с выходом третьего и с одним из входов второго усилителей, выходы первого и второго усилителей через ограничители напряжения соединены соответственно со вторыми входами этих же усилителей, а третий вход
5 первого усилителя, вторые входы ограничителей напряжения и блока деления являются входами блока задания, причем первый вход второго усилителя является одним из выходов блока задания, вторым выходом которого является выход четвертого усилителя.
0
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 637309, кл. В 66 В 1/28, 1978.
2.Авторское свидетельство СССР по заявке № 2912655/03, кл. В 66 В 1/28, 1980 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подъемной машиной | 1985 |
|
SU1331784A1 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство управления наклонной шахтной подъемной установкой | 1980 |
|
SU891550A1 |
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |