со 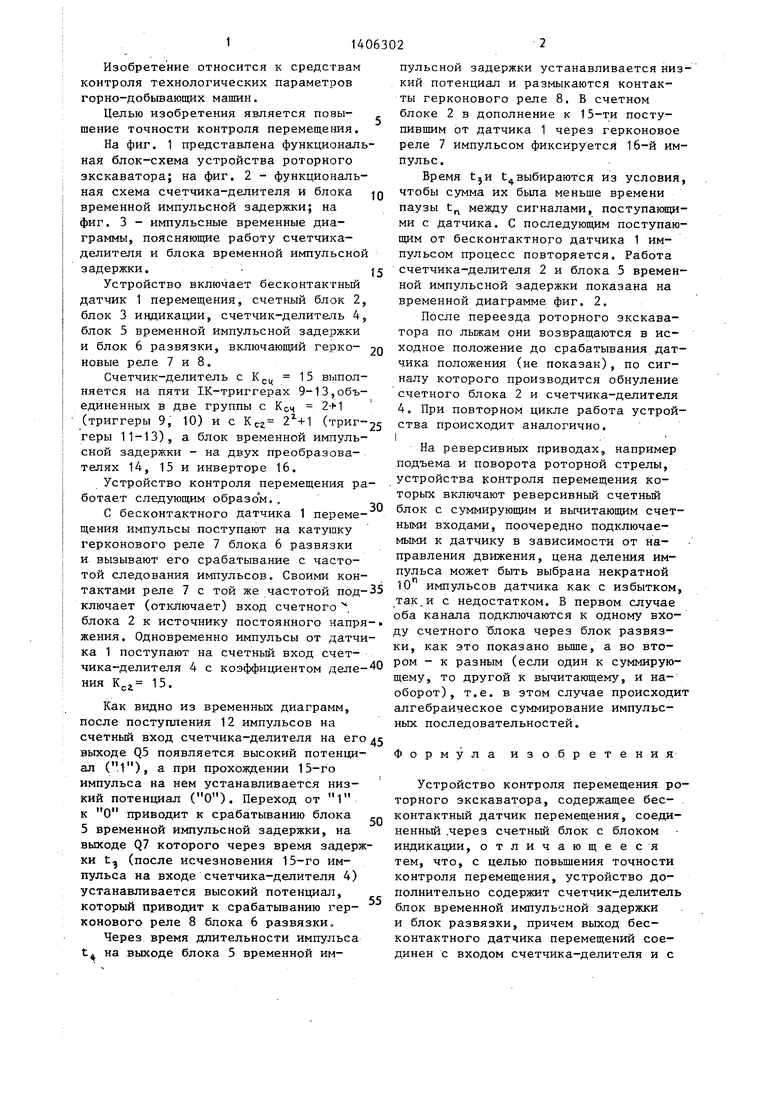
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля состояния распределенных объектов | 1985 |
|
SU1285509A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1646055A1 |
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
| Устройство для счета изделий | 1986 |
|
SU1365104A1 |
| УСТРОЙСТВО ИНДИКАЦИИ ПЛЕНКИ В ЛЕНТОПРОТЯЖНОМ ТРАКТЕ ФОТОАППАРАТА | 1997 |
|
RU2158950C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИСПРАВНОСТИ И ПЕРЕКЛЮЧЕНИЯ НИТЕЙ НАКАЛА ДВУХНИТЕВОЙ ЛАМПЫ СВЕТОФОРА | 1993 |
|
RU2064875C1 |
| Устройство управления и контроля работы невзрывных импульсных источников сейсмических сигналов | 1986 |
|
SU1408402A1 |
| Устройство для контроля и сигнализации о состоянии распределенных объектов | 1987 |
|
SU1608719A1 |
| Устройство для программного управления положением объекта | 1984 |
|
SU1193642A1 |
| Устройство для управления аэрофотоаппаратом | 1987 |
|
SU1515044A1 |
Изобретение относится к средствам контроля технологических параметров горно-добывающий машин. Цель повьшение точности контроля перемещения. Для этого устр-во дополнительно содержит счетчик-делитель (СД) 4, блок 5 временной импульсной задержки и блок развязки (БР) 6. К входу СД 4 и к первому входу БР 6 подключен выход бесконтактного датчика 1- перемещений. Выход СД 4 через блок 5 временной импульсной задержки соединен с вторым входом БР 6. Выходы БР 6 подключены к входу счетного блока 2, соединенного с блоком 3 индикации. С датчика 1 импульсы поступают на БР 6 и вызывают его срабатывание с частотой следования импульсов. Одновременно импульсы с датчика 1 поступают на вход СД 4, с выхода которого через блок 5 - на второй вход БР 6, который своими контактами подключает (отключает) вход счетного блока 2. В нем происходит суммирование импульсных последовательностей. 3 ил. i (Л С
Ф1/г.1
Изобретение относится к средствам контроля технологических параметров горно-добьшающих машин.
Целью изобретения является повышение точности контроля перемещения.
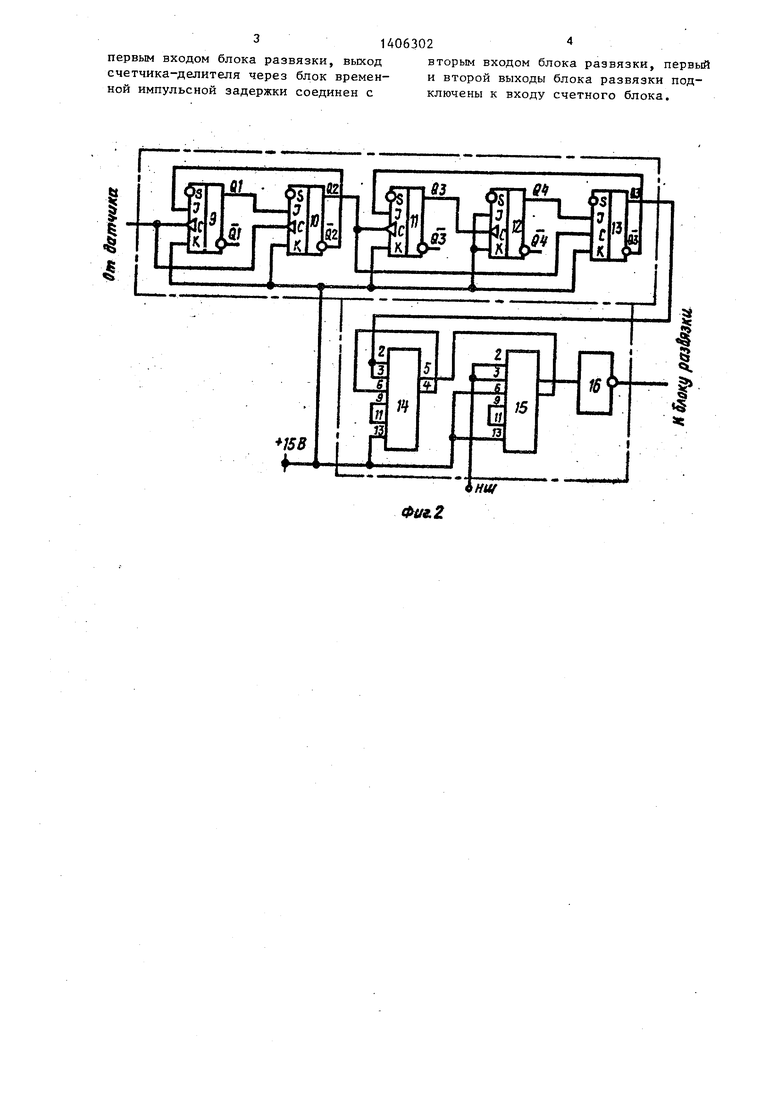
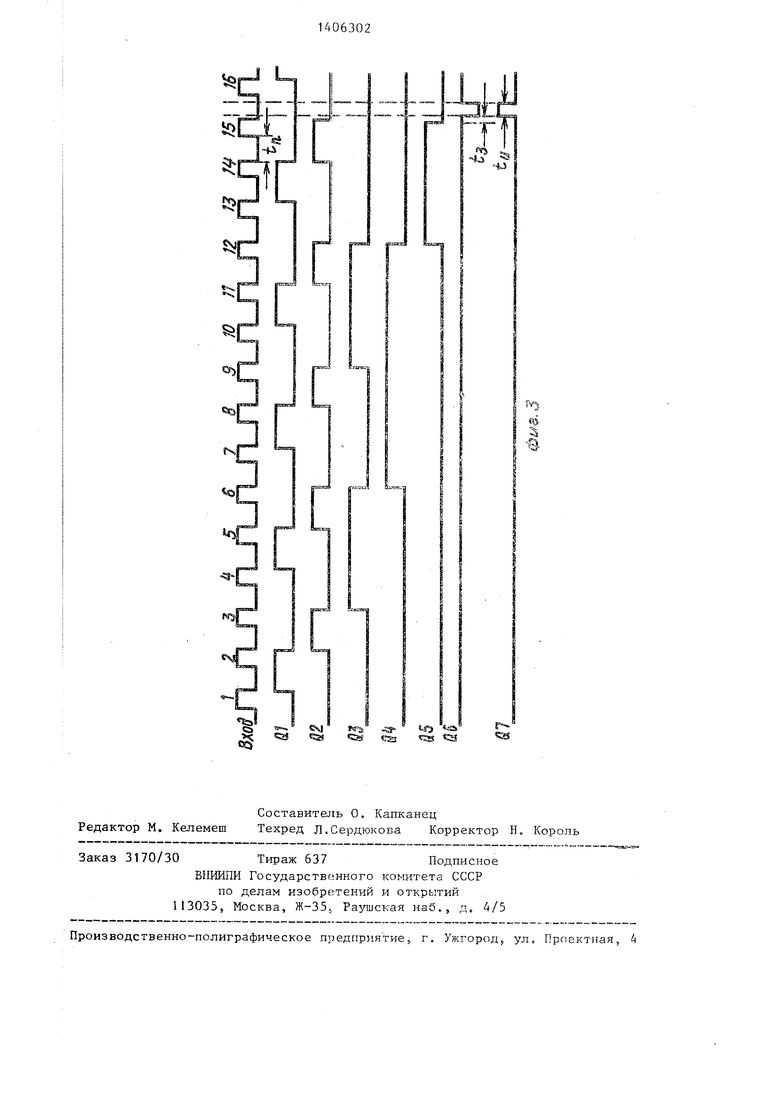
На фиг, 1 представлена функциональ ная блок-схема устройства роторного экскаватора; на фиг, 2 - функциональная схема счетчика-делителя и блока временной импульсной задержки; на фиг. 3 - импульсные временные диаграммы, поясняющие работу счетчика- делителя и блока временной импульсной задержки,
Устройство включает бесконтактный датчик 1 перемещения, счетный блок 2, блок 3 индикации, счетчик-делите пь 4, блок 5 временной импульсной задержки и блок 6 развязки, включающий герко- новые реле 7 и 8,
Счетчик-делитель с 15 выполняется на пяти 1К-триггерах 9-13,объединенных в две группы с Кеч 2-I-1 (триггеры 9, 10) и с (триггеры 11-13), а блок временной импульсной задержки - на двух преобразователях 14, 15 и инверторе 16,
Устройство контроля перемещения ра ботает следующим образо м, ,
С бесконтактного датчика 1 перемещения импульсы поступают на катушку герконового реле 7 блока 6 развязки и вызывают его срабатьшание с частотой следования импульсов. Своими контактами реле 7 с той же частотой подключает (отключает) вход счетного , блока 2 к источнику постоянного яапря жения. Одновременно импульсы от датчи ка 1 поступают на счетный вход счетчика-делителя 4 с коэффициентом деления К 15,
Как видно из временных диаграмм, после поступления 12 импульсов на счетный вход счетчика-делителя на его выходе Q5 появляется высокий потенциал (.1), а при прохождении 15-го импульса на нем устанавливается низкий потенциал (О), Переход от 1 к О приводит к срабатыванию блока 5 временной импульсной задержки, на выходе Q7 которого через время задерж ки t (после исчезновения 15-го импульса на входе счетчика-делителя 4) устанавливается высокий потенциал, который приводит к срабатыванию герконового реле 8 блока 6 развязки,,
Через время длительности импульса t на выходе блока 5 временной им
0
5
0
5
0
5
0
5
0
5
пульсной задержки устанавливается низкий потенциал и размыкаются контакты герконового реле 8, В счетном блоке 2 в дополнение к 15-ти поступившим от датчика 1 через герконовое реле 7 импульсом фиксируется 16-й импульс.
Время tJИ t выбираются из условия, чтобы сумма их была меньше времени паузы t между сигналами, поступающими с датчика. С последующим поступающим от бесконтактного датчика 1 импульсом процесс повторяется. Работа счетчика-делителя 2 и блока 5 временной импульсной задержки показана на временной диаграмме фиг, 2,
После переезда роторного экскаватора по лыжам они возвращаются в исходное положение до срабатывания датчика положения (не показан), по сигналу которого производится обнуление счетного блока 2 и счетчика-делителя 4. При повторном цикле работа устройства происходит аналогично, I-
На реверсивных приводах, например
подъема и поворота роторной стрелы, устройства контроля перемещения которых включают реверсивный счетный блок с суммирующим и вычитающим счетными входами, поочередно подключаемыми к датчику в зависимости от направления движения, цена деления импульса может быть выбрана некратной 10 импульсов датчика как с избытком, так,и с недостатком. В первом случае оба канала подключаются к одному входу счетного блока через блок развязки, как это показано вьше, а во втором - к разным (если один к суммирующему, то другой к вычитающему, и наоборот), т.е, в этом случае происходит алгебраическое суммирование импульсных последовательностей.
Формула изобретения
Устройство контроля перемещения роторного экскаватора, содержащее бесконтактный датчик перемещения, соединенный .через счетный блок с блоком индикации, отличающееся тем, что, с целью повышения точности контроля перемещения, устройство дополнительно содержит счетчик-делитель блок временной импульсной задержки и блок развязки, причем выход бесконтактного датчика перемещений соединен с входом счетчика-делителя и с
31406302
первым входом блока развязки, выход вторым входом блока развязки, первый счетчика-делителя через блок времен- и второй выходы блока развязки под- ной импульсной задержки соединен с ключены к входу счетного блока.
§
Фиг. 2
f
«fcsl
Qj 5i. еч| 4fa . «И a « C53
to «SB
r s
| Устройство дозированной подачи роторного экскаватора | 1973 |
|
SU540013A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цветков Ю.В., Ильинский И.Ф., Ключев Б.И | |||
| и Остриров В.Н, Разработка и исследование вентильных электроприводов механизмов хода и подъема стрелы роторного экскаватора производительностью 5250 | |||
| Отчет о научно-исследовательской работе | |||
| М.: МЭИ, 1985. | |||
