NJ
00 СП
Изобретение относится к полигра- , фимескому машиностроению и может быть использовано при проектировании приводов рабоч1тх органов, например,пе- чатных и фальцевальных секций.
Целью изобретения является снижение энергоемкост;и оборудования посредством использования в нем одного или нескольких резонансных настроечных устройств.
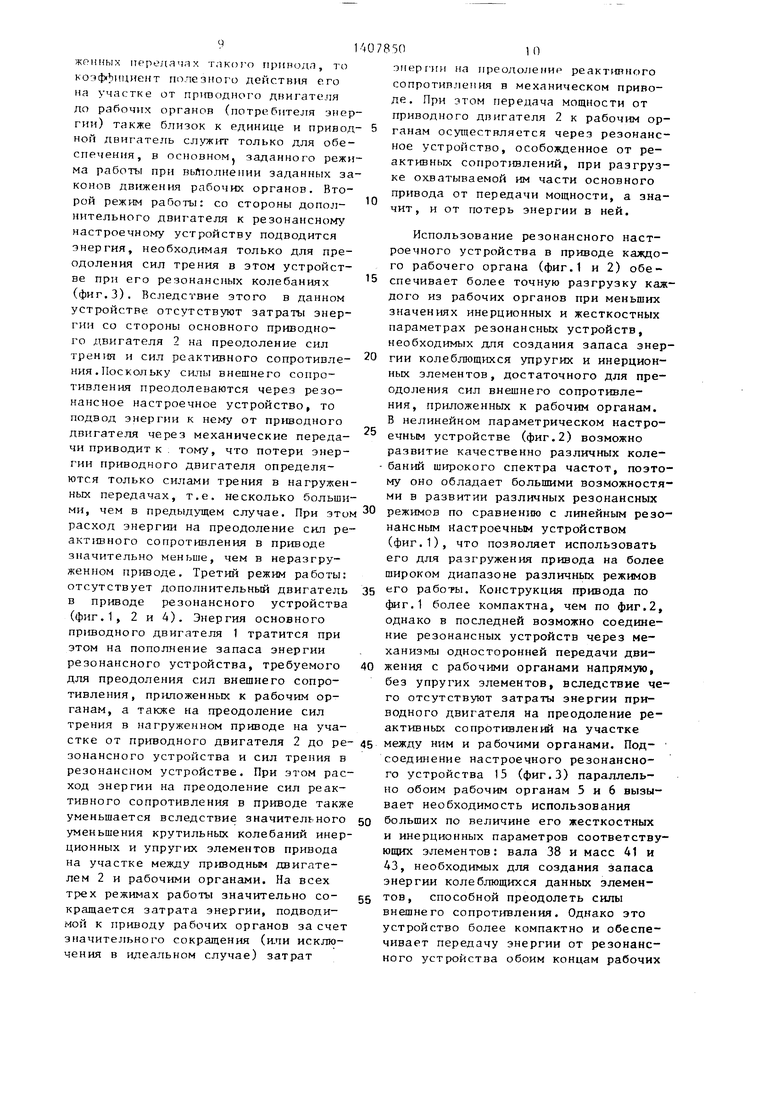
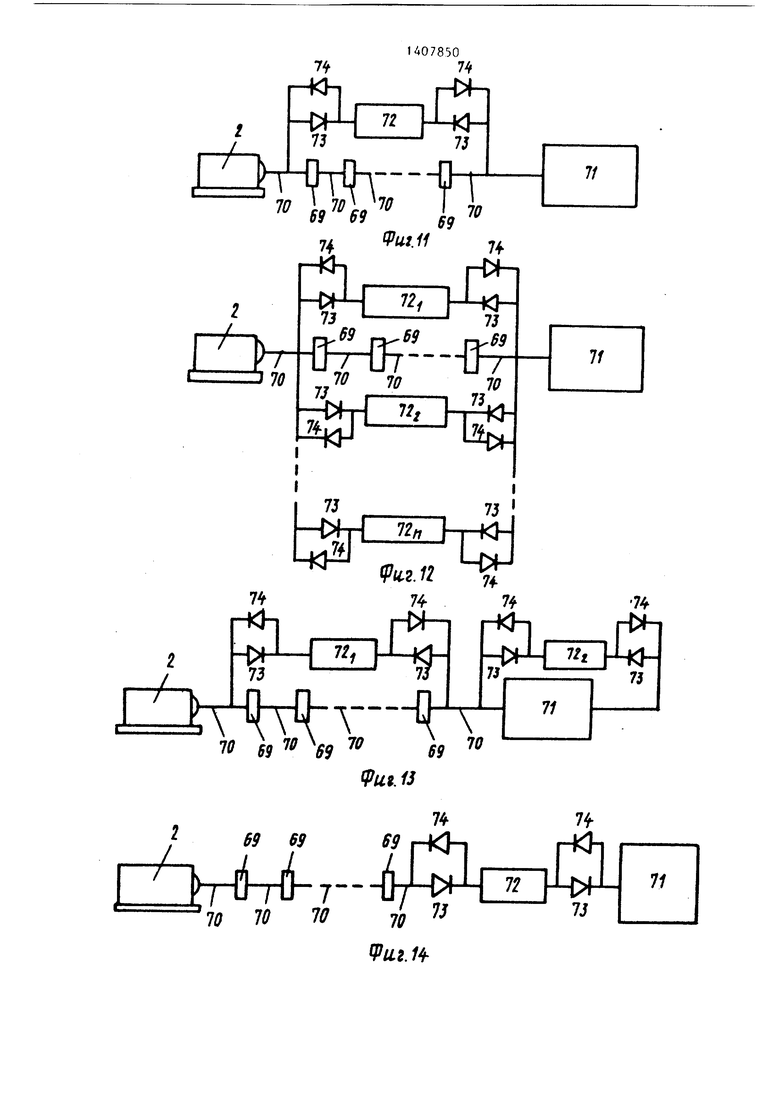
На фиг.1 показана кинематргческая схема привода с параллельным соединением резонансного настроечного устройства с рабочими органами со сто- роны привода с механизмами Для возбуждения резонансных колебаний в виде кулачковых механизмов; на фиг.2 - кинематическая схема привода с последовательным соединением разонансно- го настроечного устройства с рабочими органами со стороны, противоположной приводу, с шарнирно-рычажным механизмом для возбуждения резонансных колебаний; на фиг.З - привод с параллельньм соединением рабочих органов посредством двух механизмов свободного хода (односторонней передачи движения) противоположного действия с резонансным настроечным уст- ройством, где используется инерцион- ный элемент со ступенчато (дискретно) изменяющейся массой, состоящей из набора дополнительных инерционных элементов, и с двумя вариантами соеди нения этого устройства с дополнительными двигателями; на фиг.4 - то же, с передаточными числами разных знаков в параллельных передачах от рабо- чих органов к резонансному настроеч- ному устройству; на фиг.З и 6 - схе- hfci механизмов свободного хода односторонней передачи движения;на фиг.7 10 - структурные схемы приводов, изображенных соответственно на фиг.1-4; на фиг.11 - структурная схема привод с параллельным соединением резонансного настроечного устройства с механической передачей, состоящей из нескольких последовательно соединенных инерционных элементов; на фиг.12 - структурная схема привода с паралт лельным соединением механической передачи и нескольких резонансных настроечных устройств; на фиг.13 - структурная схема привода с присоеди Кенией одного резонансного настроечного устройства параллельно механической передаче, другого - параллель
,
Q
5 0 5 О , Q
0
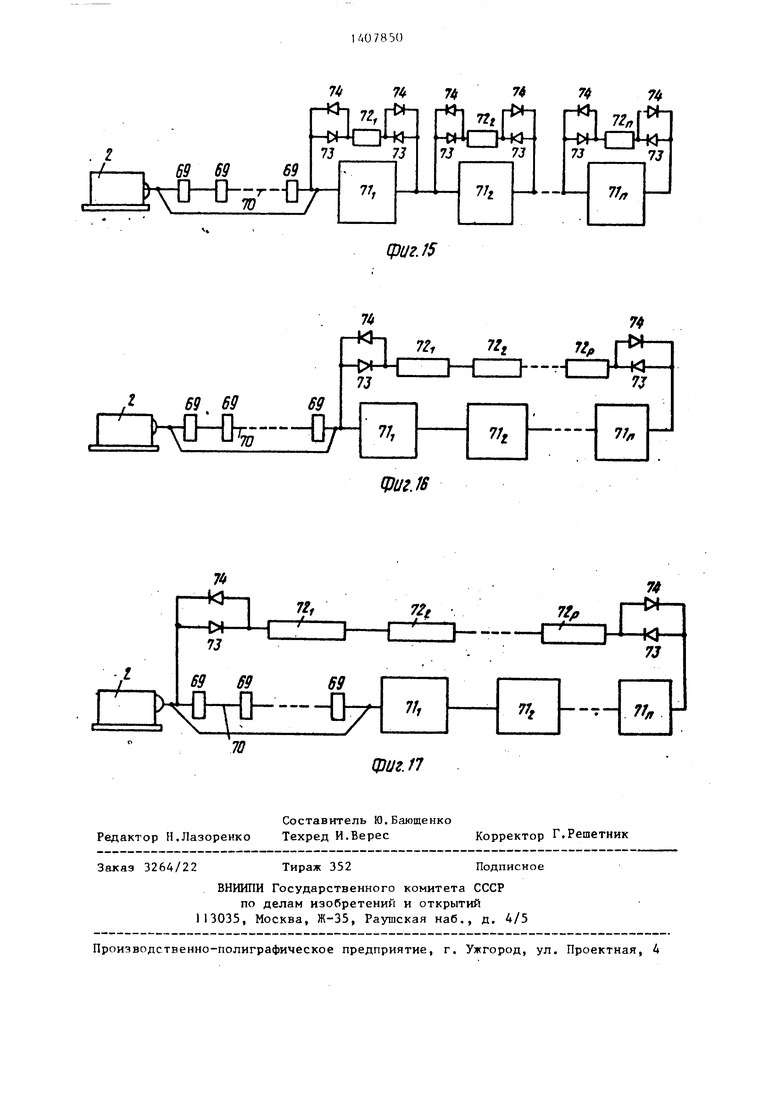
но ра.. чему органу;на фиг. 14 - структурная схема привода с последовательным соединением электродвигателя, механической передачи, резонансного настроечного устройства и рабочих органов; на фиг.15 - структурная схема привода с последовательным соединением электродвигателя, механической передачи и рабочих органов с параллельным подсоединением к каждому рабочему органу одного резонансного настроечного устройства; на фиг.16 - структурная схема привода с последовательным, соединением электродвигателя, механической передачи и нескольких рабочих органов, к которым параллельно подсоединены несколько резонансных настроечных устройств; на фиг.17 - структурная схема приво да с последовательным соединением механических передач и нескольких рабочих органов и параллельным совместным подсоединением к ним несколь-- 1
ких резонансных настроечных устройств .
Привод содержит основание 1, приводной электродвигатель 2, механические передачи 3 и 4, рабочие органы 5 и 6, например печатный и формный цилиндры печатного аппарата соответственно, связанные между собой посредством валов 7-10. Разгружающий механизм выполнен в виде резонансных настроечных устройств 11 и 12 (фиг.1) или 13 и 14 (фиг.2), или резонансного настроечного устройства 15 (фиг.З и 4). Резонансные настроечные устройства 11 и 12 Б приводе (фиг.1) содержат валы 16 и 17 и инерционные элементы (массы 18 и 19) закрепленные на валах с возможностью осевого перемещения, и снабжены механизмами для возбуждения резонансных колебаний в них. Эти механизмы выполнены в виде . кулачковых механизмов 20 и 21, жест- ко соединенных с инерционными элементами 18 и 19 соответственно (или с валом 16 и 17) и нагрузочньми элементами в виде, в общем случае, регулируемых пружин 22 и 23. Соединение резонансных настроечных устройств с приводными шестернями передачи 3 соответствующих цилиндров 5 и 6 осуществляется через механизмы 24 и 25 свободного хода односторонней передачи движения противоположного действия соответственно. Резонансные настроечные устройства 13 и 14 в приводе (фиг.2) снабжены механизмами возбуждения резонансных колебаний, содержащими рычажные механизмы, ведущие звенья которых - кр шошипы 26 и 27, соединены с инерционными эле- ментами 28 и 29, закрепленными на валах 30 и 31 этих устройств, связанных с рабочими органами 5 и 6 также посредством механизмов 24 и 25 свободного хода с односторонней передачей движения. Ведомые звенья рычажных механизмов выполнены в виде двуплечего рычага 32, закрепленного на валу 33, несущем также закрепленный на нем инерционный элемент 34, положение которого регулируемо в осевом направлении управляющим устройством 35, Резонансное настроечное устройство 15 в приводе (фиг.З) подсоединено к рабочим органам 5 и 6 посредством шестерен 36 и 37, соединенных с валом 38 этого устройства через механизмы свободного хода с односторонней передачи движения 39 и 40. В это устройство входит также инерционный элемент 41, закрепленный на валу 38 и снабженный катушкой электромагнита 42, а также набором дополнительных инерционных элементов 43, свободно установленных на оси инерционного элемента 41 и поджатых к нему пружиной 44. Отсекатель 45 служит для регулировки количества дополнительных инерционных элементов 43, подсоединяемых к основному инерционному элементу 41, выполнен в виде сектора переменной толщины,закреплен на валу 46 с возможностью перемещения вокруг и вдоль его оси и связан с управляющим устройством. Вал 38 может быть соединен с дополнительньм электродвигателем 47 одним из способов, показанных на фиг.З. В приводе (фиг.4) в отличие от привода на фиг.З шестерня 36 соединена с приводом рабочих органов через промежуточную шестерню 48, а с валом 38 - че10
15
20
25
хода, солержлщля внутреннюю зведоч- ку 50, которая может быть закреплена на валах 16,17, 30, 31 и 38, роли ки 51 и 52, взаимодействующие с пружинами 53, 54, взаимодействующий с роликом 52 и пружиной 55, более жесткой, чем пружина 53, а также обойму 56, выполненную в ступице шестерни зубчатой передачи 3 (фиг.1) или в ступицах шестерен 36 и 37 (фиг.З и 4),или выполненную в виде специальных деталей, закрепленных на валах 9 и 10 (фиг.2). На фиг.6 представлена муфта свободного хода с хра повым механизмом, собачка которого выполнена в виде двуплечего рычага с двумя рабочими выступами 58 и 59, размещенного на оси 60, закрепленной в обойме 56, выполненной, например, в ступице соответствующей шестерни из зубчатой передачи 3 или 36 и 37. Храповое колесо 61 данной муфты сво бодного хода закреплено, например, на валу 16 или 17, 30, 31 и 38,имеет два зуба 62 и 63, взаимодействующие с соответствующими выступами 58 и 59 собачки 57. На храповом колесе 61 выполнены профильные выступы 64 и 65, взаимодействующие с соответ- ствующими выемками 66 и 67 в собачке 57, которая взаимодействует со ступицей шестерни через пружину 68. Расстояние между зубьями 62 и 63 больше расстояния между выступами 58 и 59 собачки 57, т.е. собачка уста новлена относительно зубьё в храпового колеса с зазором.
На структурных схемах пр1тодов
40 фиг.7-17 позицией 2 обозначен также приводной электродвигатель, позицией 69 - инерционные элементы механических передач, упругие элементы передач (валы) - позицией 70, а по45 требитель энергии (рабочие органы) позицией 71. Резонансное настроечное устройство, выполненное по любой схеме (фиг.1-4), обозначено позицией 72, а механизмы свободного хода с
30
35
реэ механизм 49 односторонней переда- gQ односторонней передачи движения почи движения, противоположного дейст- вмо механизма 40.
Механизмы свободного хода односторонней передачи движения 25, 24, 39, 40 и 49 могут быть выполнены по одной из схем (фиг.З и 6), построенных по принципу самоуправляющихся муфт свободного хода. На фиг.З представлена роликовая муфта свободного
казаны как детекторные элементы позициями 73 и 74. Механизм для возбуждения резонансных колебаний с любой схемой его построения (фиг.1-4) gg обозначен позицией 75, а дополнитель ный электродвигатель, соединенный с резонансным настроечным устройст- ,вом - позицией 76. Причем приводы, построенные по всем схемам (фиг.7
хода, солержлщля внутреннюю зведоч- ку 50, которая может быть закреплена на валах 16,17, 30, 31 и 38, ролики 51 и 52, взаимодействующие с пружинами 53, 54, взаимодействующий с роликом 52 и пружиной 55, более жесткой, чем пружина 53, а также обойму 56, выполненную в ступице шестерни зубчатой передачи 3 (фиг.1) или в ступицах шестерен 36 и 37 (фиг.З и 4),или выполненную в виде специальных деталей, закрепленных на валах 9 и 10 (фиг.2). На фиг.6 представлена муфта свободного хода с храповым механизмом, собачка которого выполнена в виде двуплечего рычага с двумя рабочими выступами 58 и 59, размещенного на оси 60, закрепленной в обойме 56, выполненной, например, в ступице соответствующей шестерни из зубчатой передачи 3 или 36 и 37. Храповое колесо 61 данной муфты свободного хода закреплено, например, на валу 16 или 17, 30, 31 и 38,имеет два зуба 62 и 63, взаимодействующие с соответствующими выступами 58 и 59 собачки 57. На храповом колесе 61 выполнены профильные выступы 64 и 65, взаимодействующие с соответ- ствующими выемками 66 и 67 в собачке 57, которая взаимодействует со ступицей шестерни через пружину 68. Расстояние между зубьями 62 и 63 больше расстояния между выступами 58 и 59 собачки 57, т.е. собачка установлена относительно зубьё в храпового колеса с зазором.
На структурных схемах пр1тодов
фиг.7-17 позицией 2 обозначен также приводной электродвигатель, позицией 69 - инерционные элементы механических передач, упругие элементы передач (валы) - позицией 70, а потребитель энергии (рабочие органы) позицией 71. Резонансное настроечное устройство, выполненное по любой схеме (фиг.1-4), обозначено позицией 72, а механизмы свободного хода с
казаны как детекторные элементы позициями 73 и 74. Механизм для возбуждения резонансных колебаний с любой схемой его построения (фиг.1-4) gg обозначен позицией 75, а дополнительный электродвигатель, соединенный с резонансным настроечным устройст- ,вом - позицией 76. Причем приводы, построенные по всем схемам (фиг.7 51
17) Moi-ут иметь и механизмы /fi для возубл ;им1ия резонансных колебаний и допо .4 ни тельный электродвигатель 76, для упрощения схем не показанные на остальных схемах. Кроме того, на всех схемах (фиг.7-17) показано подсоединение резонансного настроечного устройства к рабочим органам (и к приводу) посредством пар детектор- ных элементов 73 и 74, обеспечивающих использование полного периода резонансных колебаний настроечного устройства, однако каядое такое подсоединение может быть осуществлено и через один детекторный элемент для использования половины периода резонансных колебаний настроечного устройства.
Привод с резонансным настроечным устройством работает следующим образом.
Электродвигатель 2 через механические передачи 3 и 4, упругие валы 7-10 передает движение на рабочие ор ганы 5 и 6, которое приводит к возникновению переменной технологической нагрузки, а значит к возбуждени в приводе крутильных колебаний с частотой возмущающей силы. Колебания передаются и резонансным настроечны устройствам, в которых их амплитуда увеличивается за счет возмущающего воздействия на них соответствующих механизмов для возбуядения колебаний - кулачковых 20 и 21 {фиг.1) или рычажных 26, 27-32 (фиг.2) - с частотой, определяемой скоростью вращения рабочих органов, и законами изменения, определяемыми профилями кулач- ков или структурой и параметрами рычажных механизмов. Параметры резонансных устройств регулируемые. Например, крутильная жесткость колеблющихся участков валов 16 и 17 (фиг.1) или участка вала 33 (фиг.2) плавно изменяется при осевом перемещении инерционного элемента (фиг.З и 4), изменяется ступенчато (дискретно) посредством подсоединения (или отсоединения) дополнительных инерционных элементов 43 к основному инерционному элементу 41 посредством управляемой катушки электромагнита 40. Указанные регулировки представляют возможность изменения частот собственных колебаний соответствующих резонансных настроечных устройств 11 - 15, а значит совпадение их с часто
5
0
5 О Q 5
5
0
5
06
гами вращсмшя раВочих органов, что обеспечир1ает развитие резонансных колебаний в настроечных устройствах. Настроечлые устройства 11, 12 и 15 содержат упругие и инерционные элементы, параметры которых остаются постоянными при их работе, поэтому развиваемые в них крутильные колебания являются близкими к линейным. Настроечные устройства 13 и 14 имеют переменные приведенные к валам 30 и 31 инерционные и жесткостные параметры вследствие переменной скорости вала 33, связанного с валами 30 и 31 шарнирно-рычажными механизмами, и поэтому являются нелинейными параметрическими системами. Развиваемые в них колебания являются не- ,линейными параметрическими.
Развиваемые разонансные колебания в настроеных устройствах передаются рабочим органам (механическим передачам или тем и другим) через механизмы 24, 25, 39, 40 и 49 свободного хода односторонней передачи движения - детекторные элементы.Данные механизмы работают следующим образом. При повороте обоймы 56, выполненной или в ступице шестерни (фиг.1, 3 и 4), или в виде специальной детали (фиг.2), осуществляемом приводом машины против часовой стрелки (фиг.5), между обоймой 56 и звездочкой 50 заклинивается ролик 52, при этом он отжимает штифт 54 и сжимает пружину 56. Ролик 51 при этом находится в расклиненном состоянии.Заклиненный ролик 52 передает вращение от ступицы к звездочке против часовой стрелки. Такой режим работы механизмов односторонней передачи движения приводит к передаче вращения от привода к элементам резонансных настроечных устройств. При возникно-. нении крутильных колебаний в этих - устройствах звездочка 50, связанная с валом резонансного устройства, со вершает возвратно-качательные движения относительно обоймы 56. При этом, если направление этих колебаний совпадает с направлением вращения ступицы и по скорость их больше скорости обоймы, происходит заклинивание ролика 51 и передача движения от звездочки к обойме, а значит от резонансного устройства к рабочему органу и приводу.
Ролик Z при том рлсклиис-н, Ь .сл скорость кол((1а11ия зпедочки направлена против скорости обойм1.т (илправ- ленне этой скорости показано пунктиром), ролик 51 расклшптоается внутренней поверхностью обоймы, а ролик 52 - штифтом 54, поскольку пружина 55 более жесткая, чем пружина 53,и отжимает ролик от внутренней поверхности обоймы.
В механизме (фиг.6) при вращении обоймы 56 рабочий выступ 58 собачки
57упирается в зуб 62 храпового колеса 61 и увлекает его за собой, а значит и вал резонансного устройства. При превышении величины скорости колебания храпового колеса 61 (вместе с валом резонансного устройства) над скоростью обоймы зуб 62 отходит от выступа 58, а профильный выступ 64, наезжая на выемку храпового колеса собачки, поворачивает ее вокруг оси 60 против часовой стрелки таким образом, что выемка 67 во втором плече собачки облегает с зазором профильный выступ 65 храпового колеса и зуб 63 упирается в рабочий выступ 59 собачки 57. Последний через собачку 57 обеспечивает движение обойме по часовой стрелке. Плотное прилегание поверхностей профильных выступов 65 и 64 с выемками 66 и
67 собачки обеспечивается пружиной 68. При изменении направления скорости колебания звездочки 61 (против часовой стрелки, показано пунктирной стрелкой) зуб 63 отходит от выступа 59 собачки, а профильный выступ 65 звездочки, взаимодействуя с выемкой 67 собачки, поворачивает и ее по часовйй стрелке. Зуб 62 храпового колеса упирается в выступ
58собачки 57, после чего осуществляется совместное движение обоймы и храпового колеса. При зтом, если энергия, приложенная к собачке со стороны обоймы, а значит привода, больше энергии, приложенной к храповому колесу со стороны резонансного настроечного устройства, то движение |и обоймы, и храпового колеса осуществляется по часовой стрелке, если наоборот, то против часовой стрелки. Данным храповым механизмом движение рабочим органам (приводу) передается от резонансного устройства за период времени, несколько меньший, чем половина периода собственных колебаний
5
0
5
0
5
0
5
5
реч1М ;1И(:иого ил гтрпсчнпго устройст- пл, Ллп унеличоиия нрсущ(й способности рпссмотренных мрхаии:1мов одно- сторонной передами дпижения они могут быть снабжены не,скольк1{ми парами роликов (фиг.5) или несколькими собачками (фиг.6). Таким образом, предлагаемые конструкции механизмов односторонней передачи движения обеспечивают кинематическую связь резонансного настроечного устройства с приводом рабочих органов (или всей машины) при согласованности направлений колебаний резонансного устройства как на одной половине периода, так и на полном их периоде с направлением вращения этих органов или разрыв кинематической связи между ними при несовпадении этих направленш.
Развитие резонансных колебаний в резонансном настроечном устройстве приводит к тому, что работа сил инерции колебательно движущ1гхся масс привода и рабочих органов, а также работа упругих сил колебательно деформирующихся валов пр1шода, т.е. работа сил реактивного сопротивления, изменяясь при этом периодически и имея разные знаки, исключаются из баланса энергии системы, вследствие чего притока энергии из внешнего источника на преодоление реактивных сопротивлений резонансно колеблющейся системы не требуется.
Воздействие резонансного настроечного устройства как разгрузочного на привод зависит от режима их совместной работы. При этом возможны три режима такой совместной работы. Первый режим работы: энергия, необходимая для преодоления сил трения в резонансном настроечном устройстве и сил внешнего (технологического) сопротивления, де1 «ствующих на рабочие органы, подводится к этому резонансному устройству от дополнительного двигателя 47 (фиг.З). Расход энергии этого дополнительного двигателя на преодоление сил реактивного сопротивления настроечного устройства при резонансных колебаниях его отсутствует, вследствие чего коэффициент передачи энергии от дополнительного двигателя к рабочим
органам максимален,близок к единице. Поскольку энергия приводного двигателя 1 при этом тратится только на преодоление малых сил трения в разгружрнных передачах такотч) приноца, то коэф|Ьициент полезного действия его на участке от приводного двигателя до рабочих органов (потребителя энергии) также близок к единице и приводной двигатель служит только для обеспечения, в основномJ заданного режима работы при вьгполнении заданных законов дв11жения рабочих органов. Второй режим работы: со стороны дополнительного двигателя к резонансному настроечному устройству подводится энергия, необходимая только для преодоления сил трения в этом устройстве при его резонансных колебаниях (фиг.З). Вследствие этого в данном устройстве отсутствуют затраты энергии со стороны основного приводного двигателя 2 на преодоление сил трения и сил реактивного сопротивления. Поскольку силы внешнего сопротивления преодолеваются через резонансное настроечное устройство, то подвод энергии к нему от пр1шодного двигателя через механические передачи приводит к тому, что потери энергии приводного двигателя определяются только силами трения в нагруженных передачах, т.е. несколько большими, чем в предыдущем случае. При это расход энергии на преодоление сил реактивного сопротивления в приводе значительно меньше, чем в неразгруженном приводе. Третш режим работы: отсутствует дополнительный двигатель в приводе резонансного устройства (фиг.1, 2 и 4). Энергия основного пргшодного двигателя 1 тратится при этом на пополнение запаса энергии резонансного устройства, требуемого для преодоления сил внешнего сопротивления, приложенных к рабочим органам, а также на преодоление сил трения в }1агруженном приводе на уча
энергии на преодоление реактивного сопротивления в механическом приводе. При этом передача мощности от приводного двигателя 2 к рабочим органам осуществляется через резонансное устройство, особожденное от реактивных согфот1голений, при разгрузке охватываемой им части основного привода от передачи мощности, а значит, и от потерь энергии в ней.
Использование резонансного настроечного устройства в приводе каждого рабочего органа (фиг.1 и 2) обеспечивает более точную разгрузку каждого из рабочих органов при меньших значениях инерционных и жесткостных параметрах резонансных устройств, необходимых для создания запаса энергии колеблющихся упругих и инерционных элементов, достаточного для преодоления сил внешнего сопротивления, приложенных к рабочим органам. В нелинейном параметрическом настроечным устройстве (фиг.2) возможно
развитие качественно различных коле- баний широкого спектра частот, поэтому оно обладает большими возможностями в развитии различных резонансных
режимов по сравнению с линейным резонансным Настроечным устройством (фиг.1), что позволяет использовать его дл-я разгружения привода на более широком диапазоне различных режимов
работы. Конструкция привода по фиг.1 более компактна, чем по фиг.2, однако в последней возможно соединение резонансных устройств через механизмы односторонней передачи движенил с рабочими органами напрямую, без упругих элементов, вследствие чего отсутствуют затраты энергии приводного двигателя на преодоление реактивных сопротивлений на участке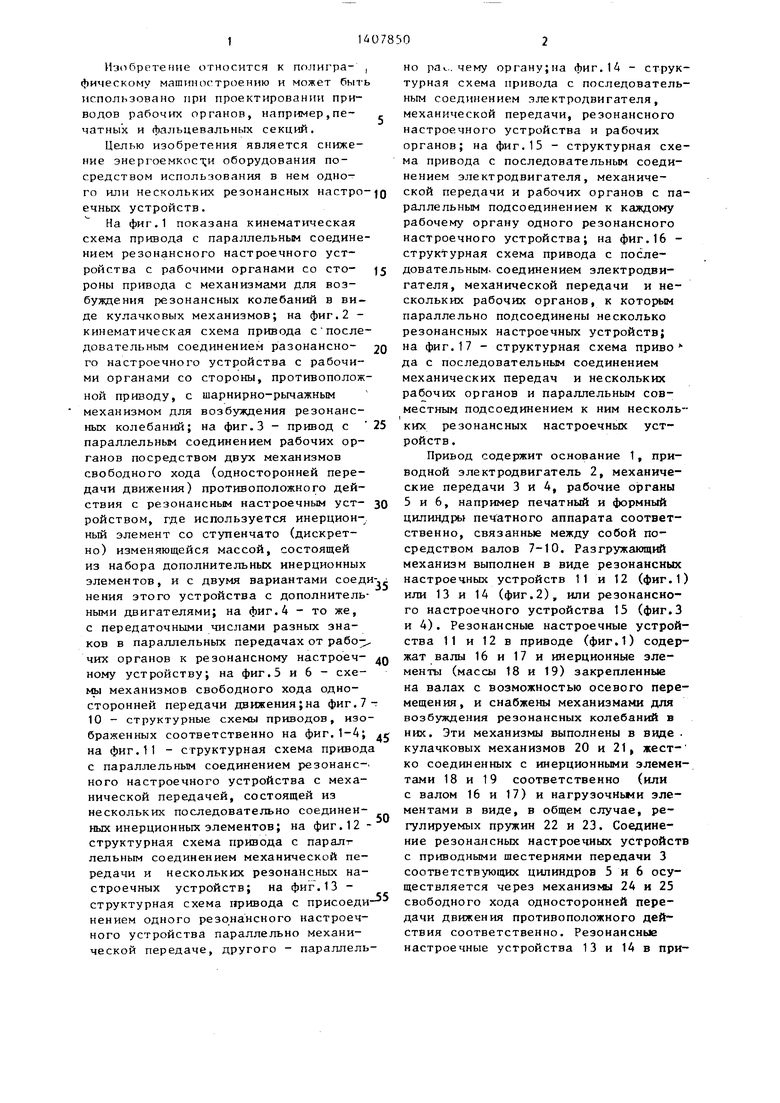




| название | год | авторы | номер документа |
|---|---|---|---|
| Привод печатного аппарата ротационной печатной машины | 1981 |
|
SU1031778A1 |
| Многосекционная ротационная печатная машина | 1989 |
|
SU1770154A1 |
| Привод многосекционной ротационной печатной машины | 1980 |
|
SU950547A1 |
| Кулачковая муфта сцепления | 1989 |
|
SU1813941A1 |
| МНОГОЦИЛИНДРОВЫЙ ПЕЧАТНЫЙ АППАРАТ ОФСЕТНОГО ГАЗЕТНОГО АГРЕГАТА | 1991 |
|
RU2030295C1 |
| Привод главного транспортера блокообрабатывающего агрегата | 1987 |
|
SU1482821A1 |
| Привод рулонной ротационной печатной машины со средствами регулирования продольного перемещения ленточного материала | 1983 |
|
SU1214488A1 |
| Привод талера в печатных машинах | 1981 |
|
SU1050890A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2153099C1 |
| Привод многосекционной ротационной печатной машины | 1982 |
|
SU1134383A1 |



Изобретение относится к полиграфическому машиностроению и может быть использовано при конструировании приводов полиграфического оборудования. Целью изобретения является снижение энергоемкости оборудования. Привйд ротационной печатной машины содержит разгружающий механизм, ко- торый представляет собой резонансное настроечное устройство, включающее нагрузочный элемент, вал, закрепленный на нем с возможностью осевого перемещения инерционный элемент, механизм для возбуждения колебаний и связанное с разгружаемым участком механизмами свободного хода. Механизм для возбуждения колебаний выполнен в виде кулачкового или рычажного механизма. Резонансное настроечное устройство может содержать несколько связанных между собой инерционных элементов и может быть подключено к рабочему органу посредством двух пар механизмов свободного хода (одно-g сторонней передачи движения) противо положного действия, 17 ил. 5 3. п. (-лы, сл
стке от приводного двигателя 2 до ре- 45 между ним и рабочими органами. Подзонансного устройства и сил трения в резонансном устройстве. При этом расход энергии на преодоление сил реактивного сопротивления в приводе также уменьшается вследствие значительного уменьшения крутильных колебаний инерционных и упругих элементов привода на участке между приводным двигателем 2 и рабочими органами. На всех трех режимах работы значительно со- кращается затрата энергии, подводимой к приводу рабочих органов за счет значительного сокращения (ачи исключения в идеальном случае) затрат
соединение настроечного резонансного устройства 15 (фиг.З) параллельно обоим рабочим органам 5 и 6 вызывает необходимость использования больших по величине его жесткостных и инерционных параметров соответствующих элементов: вала 38 и масс 41 и 43, необходимых для создания запаса энергии колеблющихся данных элементов, способной преодолеть силы внешнего сопротивления. Однако это устройство более компактно и обеспечивает передачу энергии от резонансного устройства обоим концам рабочих
и
органов, что создает более стабильное и точное ориентирование их друг
относительно друга. Энергия колебания резонансных устройств 11 и 12 (фиг.1), а также 13 и 14 (фиг.2) и 15 (фиг.З) передается рабочим органам для преодоления сил внешнего сопротивления только на одной плолови- не периода резонансных колебаний вследствие использования для соединения резонансного устройства и рабочего органа только одного механизма односторонней передачи движения. Подключение резонансного устройства к рабочим органам через пару таких механизмов, размещенных встреч но друг другу,обеспечивает передачу энергии резонансных колебаний настроечного устройства 15 (фиг.А) рабочим органам на обеих половинах периода резонансных колебаний, поскольку при совпадении направления колебаний в резонансном устройстве с на правлением вращения шестерни 37 они передаются через нее и привод 4 рабочим органам 5 и 6, а в моменты несовпадения этих направлений, т.е. когда они находятся в противофазе, колебания резонансного устройства передаются приводу 3 через промежуточную шестерню 48, обеспечивая совпадение их направления с направлением вращения привода 3 и рабочих органов 5 и 6, При передаче энергии резонансных колебаний настроечного устройства на полном их периоде рабочим органам, ее запас, необходимый для преодоления сил внешнего сопротивления на рабочих органах, обеспечивается при меньших величинах пара- метров (жесткостных и инерционных) настроечного устройства. Использование одного или нескольких резонансных настроечных устройств, параллельно подсоединенных к элементам 9 70 механических передач (фиг.11 и 12) обеспечивает разгрузку привода от реактивных сопротивлений, а значит уменьшение энергии, затрачиваемой приводным двигателем 1 и увеличение cta6mibHocTH движения рабочих органов потребителя 71 энергии. При этом использование нескольких настроечных резонансных устройств (фиг.12) обеспечивает создание резонансных режимов работы привода на разных собственных частотах, определяемых многочастотной системой настроечного yct10
15
0785012
ройства, что расширяет возможности настроечноУо устройства для разг руз- ки при различных заданных режимах рабоыт его, В пр1гаоде (фиг.13) использование отдельных различных резонансных настроечных устройств 71 и 722, подсоединенных паралельно как механическим передачам, так и потребителю энергии, обеспечивает более полное разгружение привода на этих отдельных его участках, существенно отличающихся от друга как по частотным, так и энергетическим параметрам, вследствие значительного различия параметров их инерционных и жесткостных элементов, а также приложенных сил внешнего сопротивления к рабочим органам. В приводе (фиг.14) энергия от приводного двигателя поступает к рабочим органам потребителя 71 энергии через резонансное настроечное устройство 72 и реализуется в них работой движущей 25 возбуждающей силы, развиваемой в резонансном устройстве, на преодоление только сил внешнего сопрот1{вления, что разгружает приводные элементы 69 и 70 и рабочие органы от реактивной нагрузки. В приводе (фиг.15) использование отдельных резонансных настроечных устройств 72, 72.,...,
20
30
72
fi с параметрами инерционных-и уп
ругих элементов, выбираемых в зависимости от параметров инерционных и упругих элементов рабочих органов различных потребителей энергии 71, 71,, ...,71 и сил внешнего сопротивления, приложенных к ним, обеспечивает более
полное их разгружение при небольших по величине параметрах элементов отдельных резонансных настроечных устройств. Использование общего много- частотного резонансного настроечного устройства, состоящего из отдельных резонансных устройств 71, 72, ..., 72, подсоединенных паралельно сразу всем потребителям энергии (фиг.16), обеспечивает более компактную компоновку конструкции привода и упрощает его настройку на разгруженные режимы работы при меньшей степени разгрузки и при больших по величине параметрах инерционных и
упругих элементов резонансного устройства. Общее многочастотное резонансное устройство, состоящее из отдельных последовательно соединенных между собой резонансных устройств 72;, ,
,72
Р
параллельно охватываю
7
щих все элементы 69 и 70 механических передач и потребителей энергии 71,, 71,..,,71 (фиг.17), имеет наиболее колпактную компоновку конструкции и наиболее выгодно при линейном построении привода с малым количеством элементов механических передач и рабочих органов.
Таким образом, использование резонансных настроечных устройств по все предложенным схемам компоновки их с приводами машин обеспечит создание различных вариантов разгружения элементов привода и рабочих органов от реактивной нагрузки. Это приведет к значительному уменьшению или устранению крутильных колебаний упругих и инерционных элементов основного привода и рабочих органов при передаче мощности от приводного двигателя к рабочим органам. При этом резонансное настроечное устройство является гасителем крутильных колебаний основного привода и одновременно раз-, гружающим устройством для основного привода, поскольку при резонансных колебаниях настроечного устройства в нем отсутствуют (за исключением сил трения ненагруженного привода) сопротивления для передачи мощности от двигателя к рабочим органам вследствие разгруженности его от сил реактивного сопротивления (кинематическая энергия резонансно колеблющихся
инерционных масс резонансного устройства полностью переходит в потенциальную энергию колеблющихся упругих элементов его - при компенсации необратимых потерь на трение в этом устройстве дополнительным двигателем 46, 72 или основным приводным двигателем 1). Это характеризует приводы с предлагаемыми резонансными настрЬечньми устройствами как системы со значительно уменьшенными силами реактивного сопротивления, которые в обычных приводах препятствуют прохождению полезного сигнала от дви гателя к рабочим органам и искажают его при этом прохождении. Резонансно настроечное устройство является для привода рабочих органов также аккумулятором энергии со стороны его колеблющихся инерционных и упругих элементов, расходуемой на преодоление сил внешнего сопротивления, приложенных к рабочим органам, а также передаточ
10
15
20
0785014
ным эвеном между приводным двигателем и рабочими органами, обеспечиваю- П1ИМ передачу энергии без потерь или с малыми потерями.
Такие резонансные настроечные устройства имеют свойства идеальной проводимости энергии без потерь (или почти без потерь) через свои элементы от источника энергии (двигателя) к потребителю энергии (рабочим органам) , поскольку р азгружены от сил
реактивного сопротивления.
Развитие резонансных колебаний локализуется, в резонансных настроечных устройствах механизмами односторонней передачи движения и поэтому они не передают колебательной на- груженности резонансного устройства элементам основного привода, а осуществляют передачу воздействия резонансных колебаний, совпадающих с направлением вращения рабочих орга
нов, элементам основного привода. Последние, будучи разгруженными от развития в них колебаний, обеспечивают точную, без искажений передачу полезного сигнала от двигателя к потребителю энергии.
Формула изобретения
с соответствующими цилиндрами и раз- гружающий механизм, кинематически связанный с рабочими органами, отличающийся тем, что, с целью снижения энергоемкости, разгружающий механизм представляет собой резонансное устройство, содержащее нагрузочный элемент, вал, закреплен- ный на нем с возможностью осевого перемещения инерционный элемент, механизм для возбуждения колебаний, и связан с рабочими органами механизмами свободного хода.
П
Фи.г
WfJ
4
(n/f
5/
56
f1
52
VU2.5
ft
/ 10 70 10
/
10 10 У 7010
74
fpU2.7
10 10 JO
--r
so 6969
69 69
Vuz.S
J 70 70
Lri
t
69 69
y 70 70
)
69
(риг. 10
If
72
15
11
12
7У
75
r-KhrDH
7
70
7J
75
71
75 I7f
J
75
7
71
hvT
ЧЛ1 I
7
71 / a/./f7
2
74 ±1
75
ht
тл -« 7Л N j
7i W 7 69
&9 69
hnM-T
iQ 10 10 Q
7/
7
7f
.127
747
иг. IS
I ll7f
12
11
7/
13
fPui. /f
69 69
69
KQ-%--07
70
Составитель Ю.Бающенко Редактор Н.Лазоренко Техред И.Верес Корректор Г,Решетник
Заказ 3264/22
Тираж 352
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
фиг. 15
1U
7
7 17fft
-h- -i-км
1 I1 7/
7Л,
цзиг.1в
фиг. /7
Подписное
| Привод печатного аппарата ротационной печатной машины | 1981 |
|
SU1031778A1 |
| Механический грохот | 1922 |
|
SU41A1 |
