Изобретение относится к подъемно- TpaHcnopTHobfy машиностроению, а именно к устройствам для загрузки и разгрузки подвесного конвейера.
Цель изобретения - снижение расхоа электроэнергии.
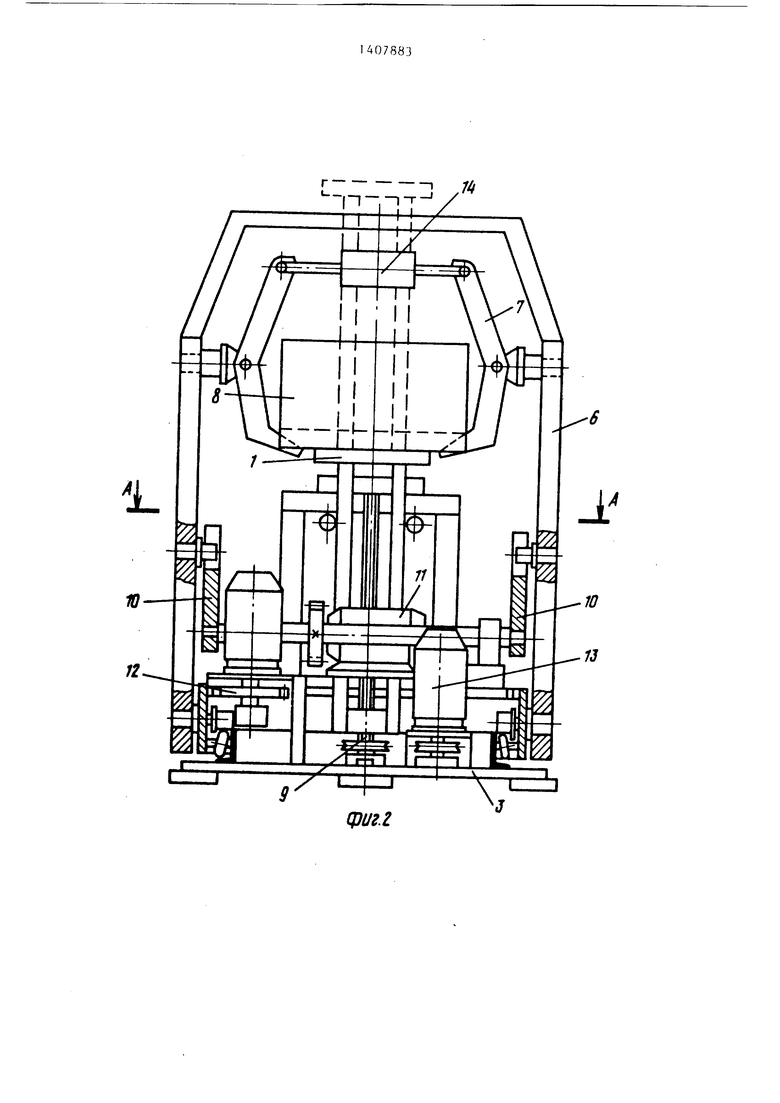
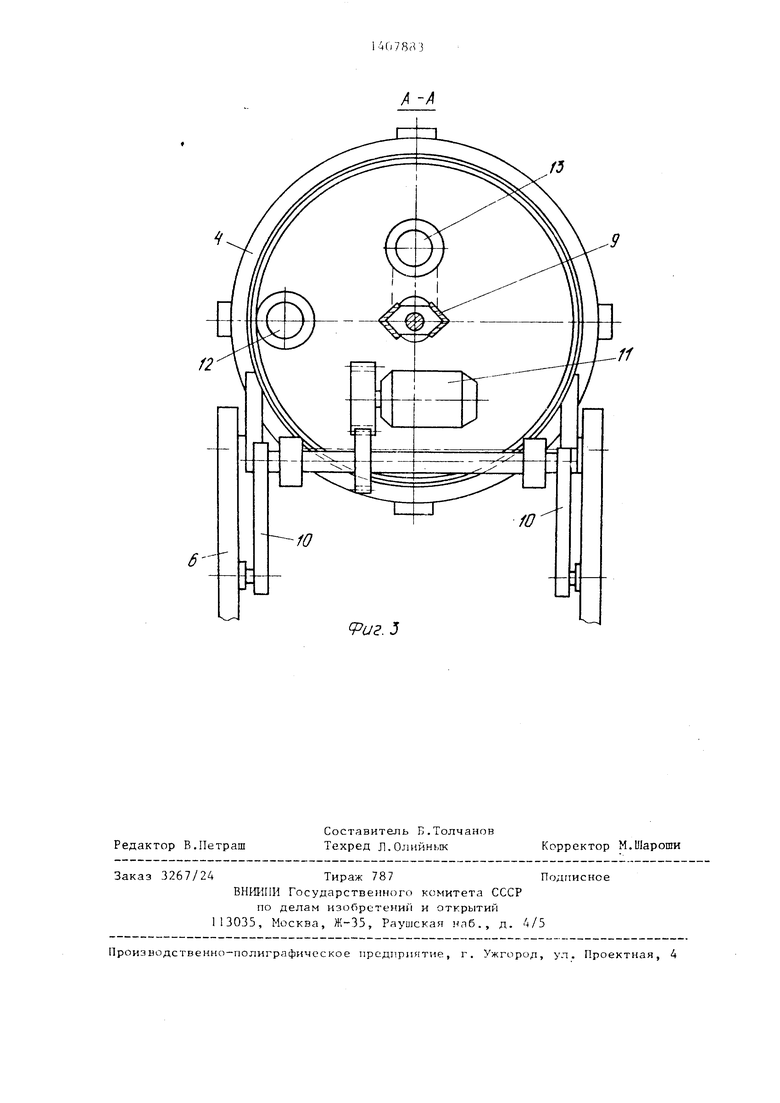
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - то же, вид спереди; на фиг.З - разрез А-Анафиг.2, JQ
Манипулятор содержит подъемный стол, состоящий из подъемной грузовой платформы 1 и корпуса 2, смонтированного на основании 3, пропущенного через отверстие и размещенного 15 внутри кольцеобразной поворотной платформы 4, установленной на основании 3, в котором закреплена ось 5 поворотной рукояти 6, выполненной П-образной формы с возможностью ох- 20 вата подъемной грузовой платформы 1, поворотно установленный на рукояти клещевой захват 7 для затаренного груза (изделия) 8, механизм 9 подъема грузовой платформы I, рычаги 10 25 привода II поворота рукояти 6, привод 12 поворота основания 4, привод 13 механизма подъема и привод 14 для ап клещевого захвата 7.
Манипулятор работает следующим об-JQ разом.
В исходном положении грузовая платформа 1 опущена, клещевой захват 7 захватывает груз 8, а рукоять 6, поворачиваясь на оси 5 с помощью привода 11, переносит груз 8 на платфор- : му I. Затем привод 14 разводит лапы
35
Q
5 0 5
Q
:
5
захвата 7 в стороны,, а рукоять 6 возвращается в исходное положение. В;слю- чается привод 9, и платформа I с грузом 8 поднимается до уровня подвески (не показана), закрепленной на каретке подвесного конвейера, при движении которой лапы захвата подвески в момент нахождения их под грузом захваг тывают последний в результате опускания платформы I.
Этим заканчивается цикл погрузки груза 8 на подвеску конвейера. Разгрузка происходит в обратной последовательности.
Формула изобретения
Манипулятор для погрузКи и разгрузки изделий с подвесного конвейера , включающий подъемный стол в виде смонтированной на корпусе подъемной грузовой платформы, установленную на основании поворотную платформу с приводом поворота, смонтированную на оси поворотной платформы рукоять П-образной формы, охватывающую подвижную грузовзпо платформу, механизм поворота рукояти и поворотно установленный на рукояти клещевой захват, отличающийся тем, что, с целью снижения расхода электроэнергии, поворотная платформа выполнена в виде кольца, а корпус подъемного стола смонтирован на основании и размещен внутри поворотной платформы.
фиг.г
f5
иг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для погрузки и разгрузки изделий с подвесного конвейера | 1983 |
|
SU1161440A1 |
| Манипулятор для перегрузки штучных грузов | 1989 |
|
SU1643349A1 |
| Устройство для перемещения и навешивания изделий | 1988 |
|
SU1572946A1 |
| Манипулятор для перегрузки штучных грузов | 1988 |
|
SU1535798A1 |
| Устройство для навешивания изделий на подвесной конвейер | 1986 |
|
SU1313778A1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| Устройство для подачи штучных грузов | 1986 |
|
SU1435515A1 |
| Устройство для загрузки изделий с подвесного конвейера | 1972 |
|
SU498232A1 |
| Перегрузочное устройство | 1976 |
|
SU619413A1 |
| Грузозахватное устройство подвесного конвейера для транспортирования изделий | 1984 |
|
SU1186292A1 |
Изобретение относится к подъемно-транспортному машинострое1-гию. Цель изобретения - снижение расхода электроэнергии. Подъемный стол выполнен в виде подъемной грузовой платформы (И) 1 с механизмом подъема 9, уста- СП новленной на корпусе 2, смонтированном на основании и размещенном внутри кольцеобразной поворотной П 4. Последняя установлена на основании, в котором закреплена ось 5 П-образ- ной поворотной рукояти (Р) 6, охватывающей П 1. На Р 6 поворотно установлен клещевой захват 7 для затаренного груза (Г) 8. Механизм поворота Р 6 выполнен в виде рычага 10 привода поворота 11. Захват 7 захватывает Г 8, а Р 6, поворачиваясь на оси 5, переносит Г 8 на П 1. После разведения лап захв.ата 7 в стороны Р 6 возвращается в исходное положение. Включают механизм подъема 9, и П 1 вместе с Г 8 поднимается до уровня подвески подвесного конвейера. При движении подвески в момент нахождения ее под Г 8 она захватывает Г 8 при опускании П I. 3 ил. « (Л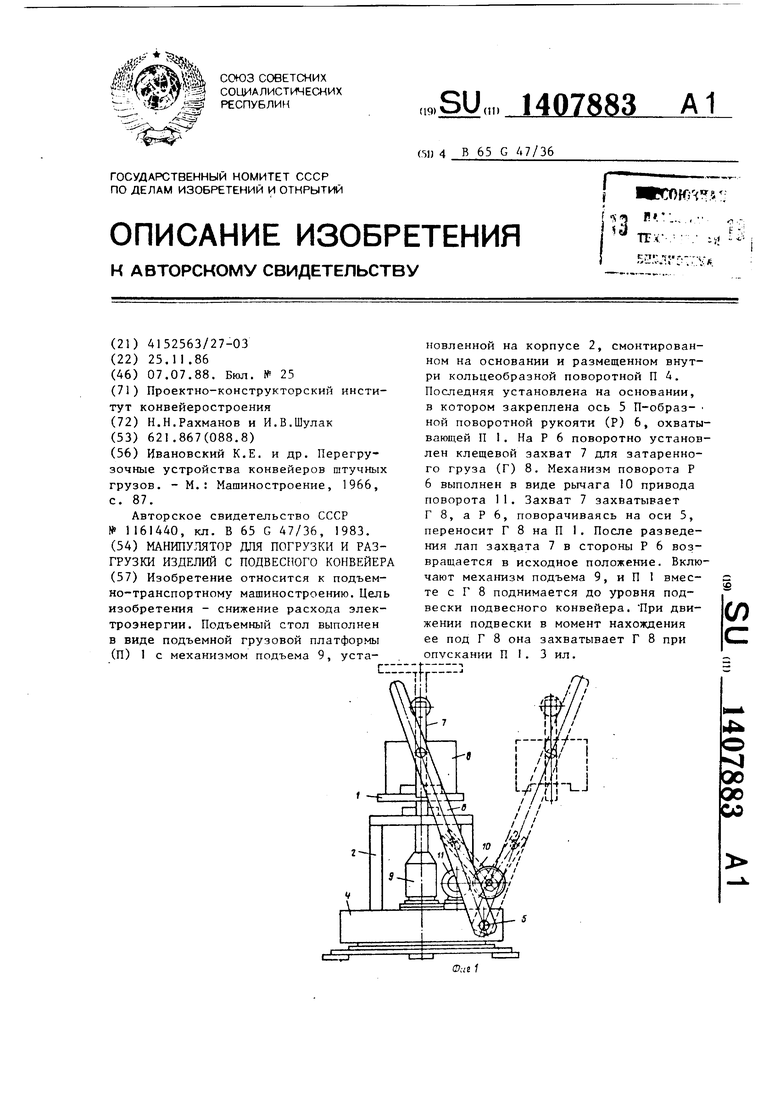
| Ивановский К.Е | |||
| и др | |||
| Перегрузочные устройства конвейеров штучных грузов | |||
| - М.: Машиностроение, 1966, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Манипулятор для погрузки и разгрузки изделий с подвесного конвейера | 1983 |
|
SU1161440A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
