перпендикулярными продольным осям цапф 13 отверстиями и пропущенными через последние валиками, закрепленными на К 8. Груз 11 передается захватом 10 на подвески 12 конвейера или с них в стеллаж. При подходе подвески 12 с грузом 11 происходит лодьем К 8 от механизма подъема 5 v
съем груза захватом 10. После поворота С 4 груз 11 передается в ячейку стеллажа. При перемещении К 8 осуществляется поворот Р 14 вокруг цапфы 13 и с последней - вокруг валиков, что обеспечивает равномерное распределение нагрузок на катки 15,16 и ролики 17. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для перегрузки штучных грузов | 1988 |
|
SU1535798A1 |
| МЕХАНИЗИРОВАННЫЙ СКЛАД | 1989 |
|
RU2033377C1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1131779A1 |
| Склад для хранения штучных грузов | 1982 |
|
SU1030265A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Конвейер для транспортировки и перегрузки штучных грузов | 1972 |
|
SU540779A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ | 1966 |
|
SU182051A1 |
| МЕХАНИЗИРОВАННЫЙ СКЛАД ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 1991 |
|
RU2041142C1 |

Изобретение относится к подъемно- транспортному машиностроению и предК назначено для перегрузки штучных грузов со стеллажа на подвесной конвейер Цель - повышение надежности и долговечности работы и снижение трудоемкости изготовления Манипулятор содержит вертикальные направляющие стойки (С) 4, грузоподъемную каретку (К) 8 с телескопическим захватом 10, связанный с К 8 механизм подъема 5 и размещенные в С 4 и соединенные с {8 поворотные двуплечие рычаги (Р) 14. На Р 14 смонтированы оси с установаленными на них катками 15, 16 и со встроенными в последние боковыми роликами 17 При этом Р 14 связаны с К 8 посредством цапф 13, на концах которых смонтированы головки с сь N ы ы 4 Ю Фиг,
Изобретение относится к подъемно- транспортному машиностроению, а именно к устройствам для перегрузки штучных грузов со стеллажа на подвесной конвейер или с конвейера на пристеночный накопитель и т.п.
Целью изобретения является повышение надежности и долговечности работы и снижение трудоемкости изготовления.
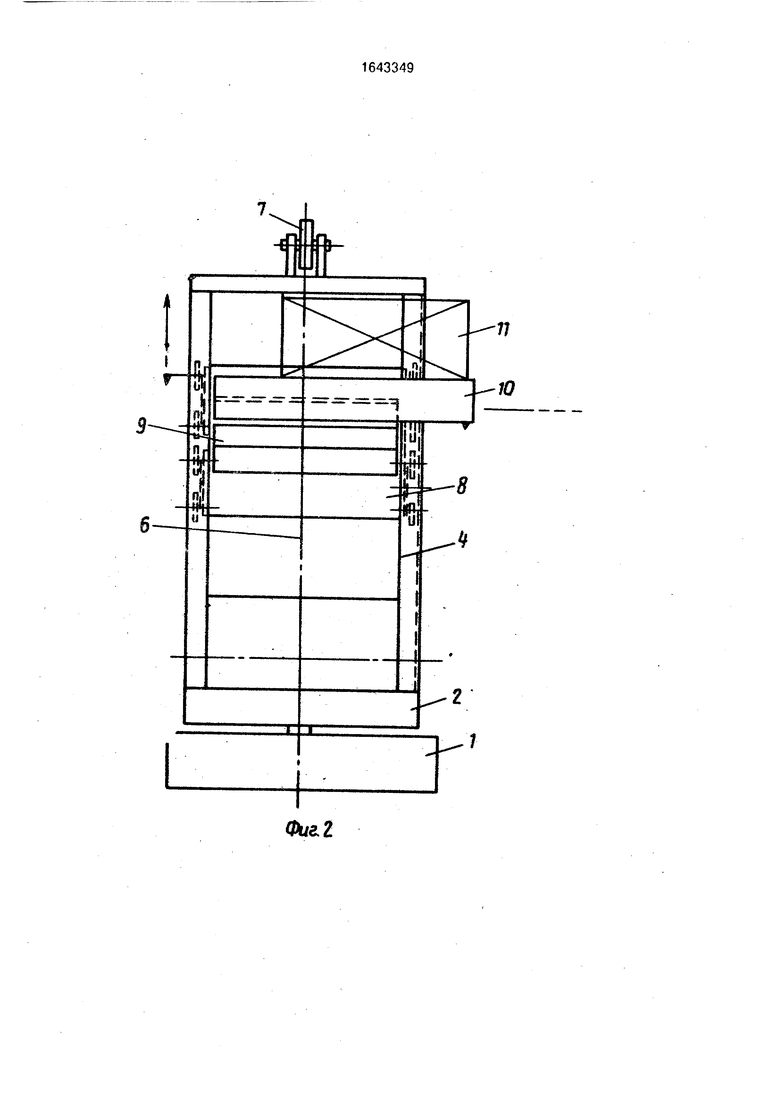
На фиг.1 изображен манипулятор для перегрузки штучных грузов, обацлй вид; на фиг. 2 - то же, вид спереди; на фиг. 3 представлен узел установки двуплечего рычага с катками на цапфе и ее крепление к раме каретки.
Манипулятор для перегрузки штучных грузов содержит основание 1, смонтированную на вертикальной оси поворотную платформу 2, привод 3 поворота, раму с вертикальными направляющими 4, механизм 5 подъема, грузовой канат 6, перекинутый через блок 7 и связанный с грузоподъемной кареткой 8, имеющей консоль 9 с телескопическим захватом 10.
Перегружаемый затаренный груз 11 загружается на подвеску 12 конвейера или разгружается с нее. Сбоку рамы каретки 8 имеются цапфы 13, на которых бэлаксирно смонтированы двуплечие рычаги 14, несущие на концах оси для катков 15,16 со встроенными боковыми роликами 17 и 18.
Цапфа 13 соединена с рамой каретки 8 шарнирно при помощи валика 19, пропущенного через отверстие в головке 20 цапфы 13 и закрепленного в раме каретки 8, при этом ось С валика 19 расположена пер- пендикуЬярно продольной оси цапфы 13.
Устройство работает следующим образом.
При подходе подвески 12 конвейера с тарным грузом 11 к позиции манипулятора каретка 8 с захватом 10 поднимается с помощью механизма 5 и площадка секции захвата 10 приподнимает груз 11, снимая его с лап подвески 12. Затем происходит поворот платформы 2 от привода 3 на угол 90° и за счет перемещения секций телескопического захвата 10 груз 11 перемещается в ячейку стеллажа или пристаночного накопителя. После опускания вниз каретки 8 на некоторую величину тарный груз 11 будет
положен на полки ячейки стеллажа или накопителя. Секции захвата 10 возвратятся в исходное положение, а манипулятор повернется на 90° в обратном направлении и будет готов повторить цикл работы. Загрузка
подвески 12 конвейера осуществляется в обратной последовательности после снятия груза 11 из ячейки стеллажа. В процессе перемещения каретки 8 на катках 15 и 16 по вертикальным направляющим 4 возникающие боковые нагрузки передаются через ролики 17 и 18 на рычаг 14, который, имея возможность поворачиваться вместе с цапфой 13 вокруг валика 19, обеспечивает равномерное распределение нагрузки между
роликами 17 и 18, Одновременно за счет поворота рычага 14 вокруг оси цапфы 13 обеспечивается равномерное распределение нагрузки между катками 15 и 16. В итоге уменьшается износ поверхности вертикальных направляющих 4 и повышается надежность и долговечность работы устройства в целом.
Формула изобретения Манипулятор для перегрузки штучных
грузов, включающий вертикальные направляющие стойки, грузоподъемную каретку с захватом, связанный с грузомподъемной кареткой механизм подъема и размещенные в вертикальных направляющих стойках и соединенные с грузовой кареткой через цапфы поворотные двуплечие рычаги с осями с установленными на них катками и со встроенными в последние боковыми роликами, отличающийся тем, что, с целью
повышения надежности и долговечности работы и снижения трудоемкости изготовления, он снабжен смонтированными на цапфах головками, каждая из которых выполнена с отверстием, перпендикулярным
продольной оси цапфы, и закрепленными на каретке валиками, расположенными в от- верстиях головок.
Фиг.З
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Манипулятор для перегрузки штучных грузов | 1988 |
|
SU1535798A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
