//
4;
со
СП
ел сд
1П-П-1
сриг.г
л
Изобретение относится к устройствам для Ьаботы в автоматическом режиме и может рыть использовано в автоматических станоч- jibix линиях, например, при подаче заготовок в кассеты ленточнопильного тарно- делительного станка.
Цель изобретения - обеспечение надежной ориентированной подачи на приемный конвейер штучпых грузов.
На фиг. 1 изображено устройство для |г1одачи штучных грузов, вид сбоку; на фиг. 2 рукоять с захватом при подаче заготовки, ориентированной по ширине выпиливаемой доп.1,ечки (пунктиром дано положение захвата при подаче заготовок, не ориенданного размера контакты 14 и 15 не взаими- действуют. После настройки устройство включают в работу. Рукоять 5, передвигаясь по колонке 3 вниз, захватывает отдельную заготовку 17, а гидроиилиндр 9, воздействуя на челюсть 0, зажимает ее. Если заготовка 17 соответствует заданному размеру по толщине (шири.не выпиливаемой дощечки), то контакты 14 и 15 разомкнуты, и потому рукоять 5, поворачиваясь 10 вокруг колонки 3, подает заготовку 17 {без поворота около ее продольной оси) к месту укладки в кассету 18 приемного конвейера 19 ленточнопильного станка, челюсти захвата разжимаются, заготовка 17
гированных по щирнне выпиливаемой до-укладывается в кассету 18. Затем рукоять 5
щечки, т. е. заготовка повернута на 90°);возвращается в исходное положение. Если
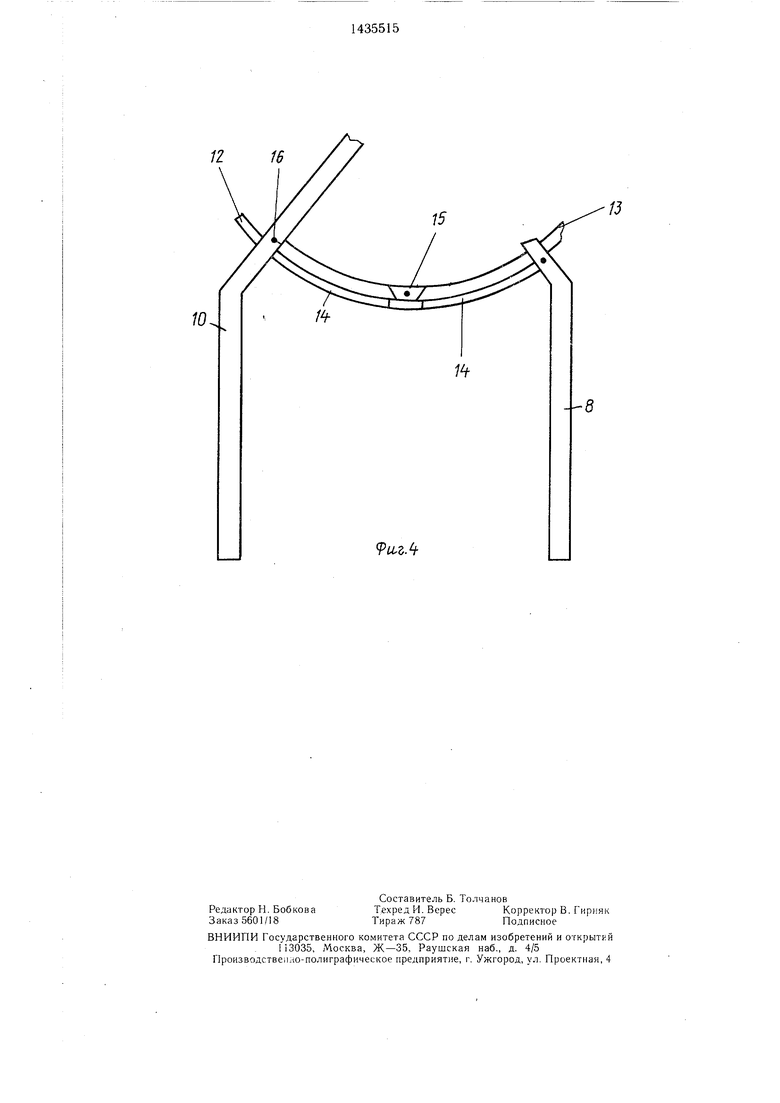
вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - следящее приспособление.
I Устройство содержит закрепленный на основании 1 поворотный стол 2 с установленже заготовка 17 оказалась зажатой между челюстями 8 и 10 другой стороной, не соответствующей заданному размеру, то контакты 14 и 15 оказываются замкнуты ной на нем колонкой 3, несущей подвиж- 20 я подается команда на работу гидроци- ный вдолЬ нее корпус 4. В последнемлиндра 11, который поворачивает диск 7 с
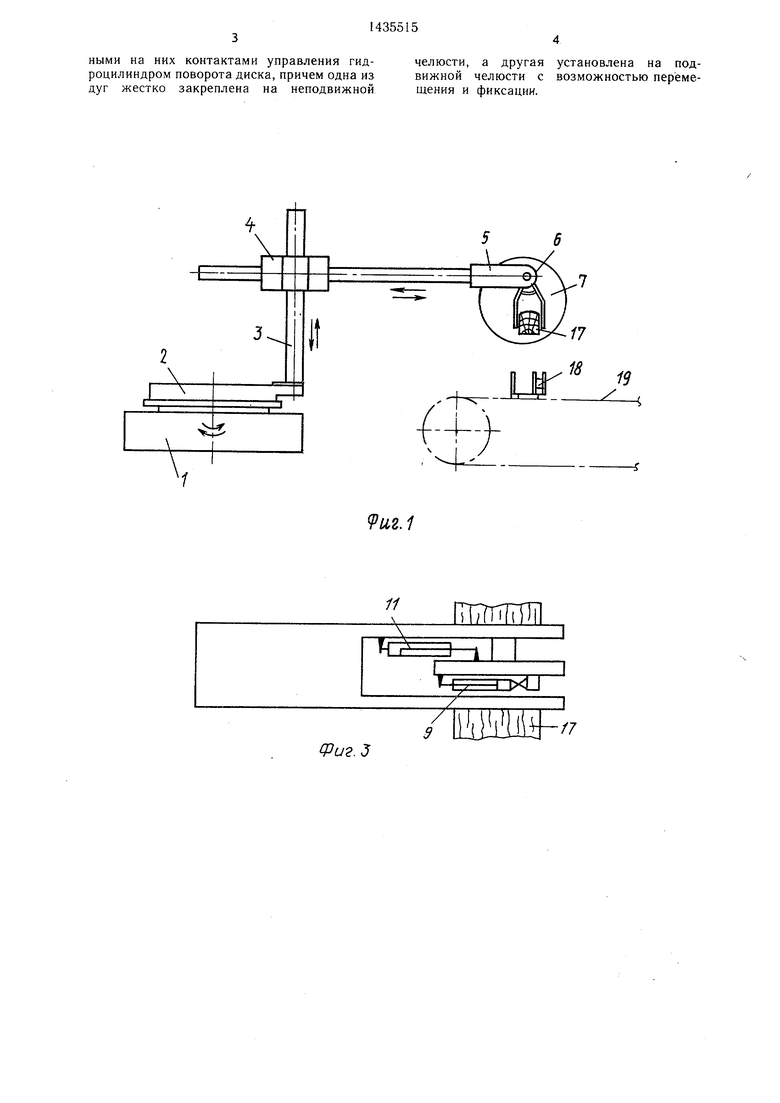
закреплена с возможностью перемещения вдоль своей продольной оси рукоять 5 с захватом и механизмом его ориентации. Вращение колонки относительно вертикальной оси обеспечивается поворотным столом 2. Вертикальный подъем рукояти 5 осуще- |ствляется при перемещении корпуса 4 по колонке 3. На рукояти 5 щарнирно посредством оси 6 закреплен диск 7, жестко связанный с неподвижной челюстью 8 захвата. Для зажима грузов установлен при- вод в виде гидроцилиндра 9, один конец которого шарнирно связан с диском 7. а I второй - с подвижной челюстью 10 захвата. Челюсть 10 установлена подвижно относительно диска 7 и с возможностью вращения вокруг оси 6, а гидроцилиндр П, служащий для поворота диска в вертикальной плоскости, одним концом щарнирно соединен с рукоятью 5, а вторым концом - с диском 7. Между челюстями 8 и 10 смонтировано следящее приспособление, выпол- дО привода челюстей, отличающееся тем, что, с ненное в виде дуг 12 и 13 с контак-целью обеспечения надежной ориентировантами 14 и 15 соответственно для управ-ной подачи на приемный конвейер щтуч30
захватом и заготовкой 17 на 90°, при этом заготовка ориентируется по отношению к кассетам для укладки заданным размером. После этого подается команда и рукоять 5 сначала вдвигается в корпус 4 на величину смещения заготовки, затем поворачивается вокруг колонки 3 к месту укладки заготовки 17 в кассеты 18, опускается, челюсти разжимаются и заготовка 17 опускается в кассету 18. Затем цикл повторяется.
Формула изобретения
1. Устройство для подачи штучных .,, грузов, включающее поворотный стол со смонтированной на нем колонкой, подвижный вдоль колонки корпус и помещенную в ней подвижную вдоль продольной оси рукоять с захватом на свободном конце в виде неподвижной и подвижной от
ления гидроцилиндром 11. Дуга 12 жестко закреплена на неподвижной челюсти 8, а дуга 13 закреплена с возможностью перемещения при помощи болта 16 на под- вижной челюсти 10.
Все перемещения механизмов устройства осуществляются от индивидуальных приводов. Ход поршня гидроцилиндра 11, слуных грузов, захват установлен на рукояти поворотно в вертикальной плоскости и снабжен размещенным между челюстями следящим приспособлением.
2. Устройство по п. 1, отличающееся тем, что захват установлен на рукояти посредством поворотного на оси в вертикальной плоскости диска, имеюш.его гидрожащего для поворота диска 7 вокруг осицилиндр поворота, щарнирно соединенный
6, позволяет поворачивать диск 7 на 90° Груз в виде заготовки 17 подается в кассеты 18 приемного конвейера 19.
Устройство работает следующим образом.
Предварительно челюсти 8 и 10 захвата
одним концом с рукоятью, а другим с диском, при этом неподвижная челюсть захвата жестко соединена с диском, а подвижная челюсть установлена на оси диска, причем привод подвижной челюсти настраивают на заданную ширину заготов- 55 шарнирно установлен на диске, ки 17 (по ширине выпиливаемой дошеч- 3. Устройство по пп. 1 и 2, отлики). Для этого устанавливают контактычающееся тем, что следящее приспособлетак, что в период захвата заготовки за-ние выполнено в виде дуг с закрепленданного размера контакты 14 и 15 не взаими- действуют. После настройки устройство включают в работу. Рукоять 5, передвигаясь по колонке 3 вниз, захватывает отдельную заготовку 17, а гидроиилиндр 9, воздействуя на челюсть 0, зажимает ее. Если заготовка 17 соответствует заданному размеру по толщине (шири.не выпиливаемой дощечки), то контакты 14 и 15 разомкнуты, и потому рукоять 5, поворачиваясь вокруг колонки 3, подает заготовку 17 {без поворота около ее продольной оси) к месту укладки в кассету 18 приемного конвейера 19 ленточнопильного станка, челюсти захвата разжимаются, заготовка 17
укладывается в кассету 18. Затем рукоять 5
же заготовка 17 оказалась зажатой между челюстями 8 и 10 другой стороной, не соответствующей заданному размеру, то контакты 14 и 15 оказываются замкнуты я подается команда на работу гидроци- линдра 11, который поворачивает диск 7 с
привода челюстей, отличающееся тем, что, с целью обеспечения надежной ориентирован
захватом и заготовкой 17 на 90°, при этом заготовка ориентируется по отношению к кассетам для укладки заданным размером. После этого подается команда и рукоять 5 сначала вдвигается в корпус 4 на величину смещения заготовки, затем поворачивается вокруг колонки 3 к месту укладки заготовки 17 в кассеты 18, опускается, челюсти разжимаются и заготовка 17 опускается в кассету 18. Затем цикл повторяется.
Формула изобретения
привода челюстей, отличающееся тем, что, с целью обеспечения надежной ориентирован1. Устройство для подачи штучных грузов, включающее поворотный стол со смонтированной на нем колонкой, подвижный вдоль колонки корпус и помещенную в ней подвижную вдоль продольной оси рукоять с захватом на свободном конце в виде неподвижной и подвижной от
ных грузов, захват установлен на рукояти поворотно в вертикальной плоскости и снабжен размещенным между челюстями следящим приспособлением.
2. Устройство по п. 1, отличающееся тем, что захват установлен на рукояти посредством поворотного на оси в вертикальной плоскости диска, имеюш.его гидроцилиндр поворота, щарнирно соединенный
ными на них контактами управления гидроцилиндром поворота диска, причем одна из дуг жестко закреплена на неподвижной
челюсти, а другая установлена на подвижной челюсти с возможностью перемещения и фиксации.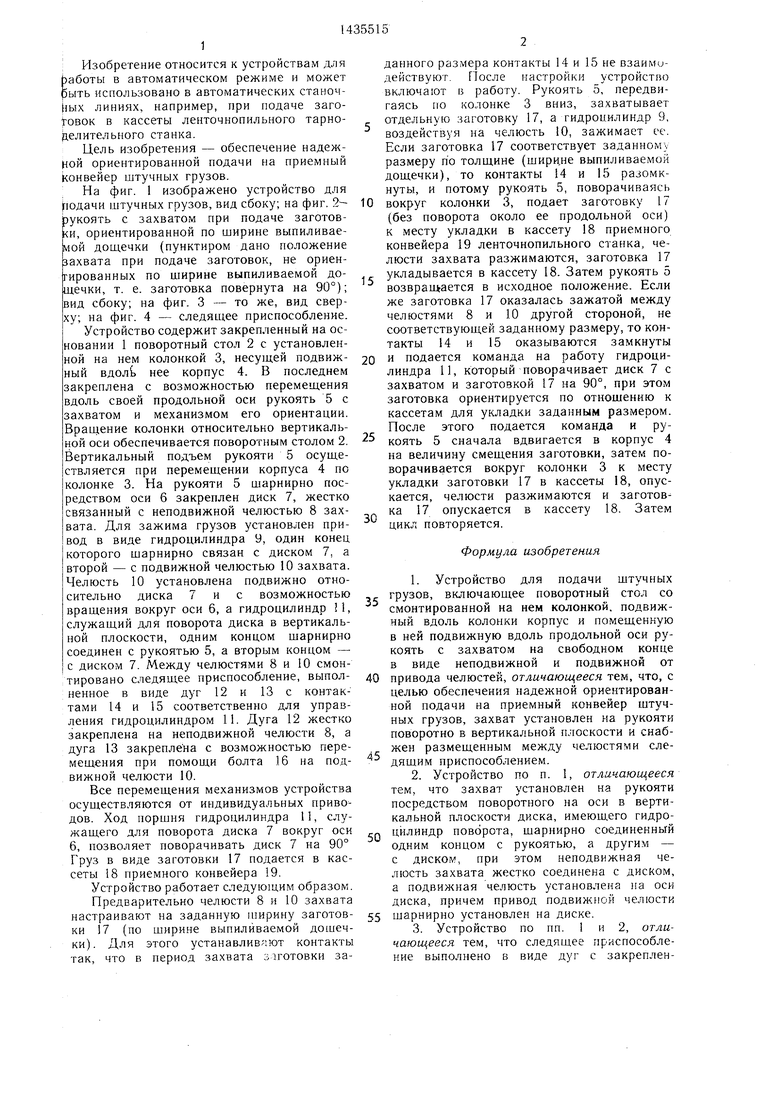
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство подачи заготовок | 1987 |
|
SU1493572A1 |
| Рабочее оборудование гидравлического экскаватора | 1990 |
|
SU1778245A1 |
| Устройство для погрузки длинномерных изделий | 1974 |
|
SU529940A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| Строительный манипулятор | 1986 |
|
SU1355676A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1661290A1 |
| Рабочее оборудование одноковшового экскаватора | 1988 |
|
SU1602951A1 |
| УСТРОЙСТВО для ПОГРУЗКИ ДЕРЕВЬЕВ | 1973 |
|
SU375054A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| АВТОМОБИЛЬНЫЙ КОНСОЛЬНЫЙ КРАН | 2016 |
|
RU2624888C1 |
Изобретение относится к устр-вам для работы в автоматическом режиме и м. б. использовано в автоматических станочных линиях, например, при подаче заготовок в кассеты ленточнопильного тарно- делительного станка. Цель - обеспечение надежной ориентированной подачи на приемный конвейер штучных грузов. На поворотном столе установлена колонка, несущая подвижный вдоль нее корпус. В последнем закреплена с возможностью пере.мещения вдоль своей оси рукоять (Р) 5 с захватом и механизмом его ориентации. Установленный на свободном конце Р 5 захват выполнен в виде неподвижной 8 и подвижной 10 челюстей и расположен на ней поворотно в вертикальной плоскости. На Р 5 шарнирно посредством оси 6 закреплен диск (Д) 7, жестко связанный с челюстью 8, имеющи; : гидроцилиндр (ГЦ) 11 поворота. Один конец последнего шарнирно связан с Р 5, другой - с Д 7. Челюсть 10 установлена на оси 6 Д 7, ее привод в виде ГЦ 9 шарнирно установлен на Д 7. Между челюстями 8 и 10 смонтировано следящее приспособление в виде дуг с контактами для управления ГЦ 11. Если заготовка 17 зажата между челюстями 8 и 10 стороной, не соответствующей заданному размеру, контакты следящего приспособления замыкаются. Подается команда на работу ГЦ .11. Последний поворачивает Д 7 с захватом и заготовкой 17 на 90°. При этом заготовка 17 ориентируется заданным размером для последующей укладки. 2 з.п. ф-лы, 4 ил. g (Л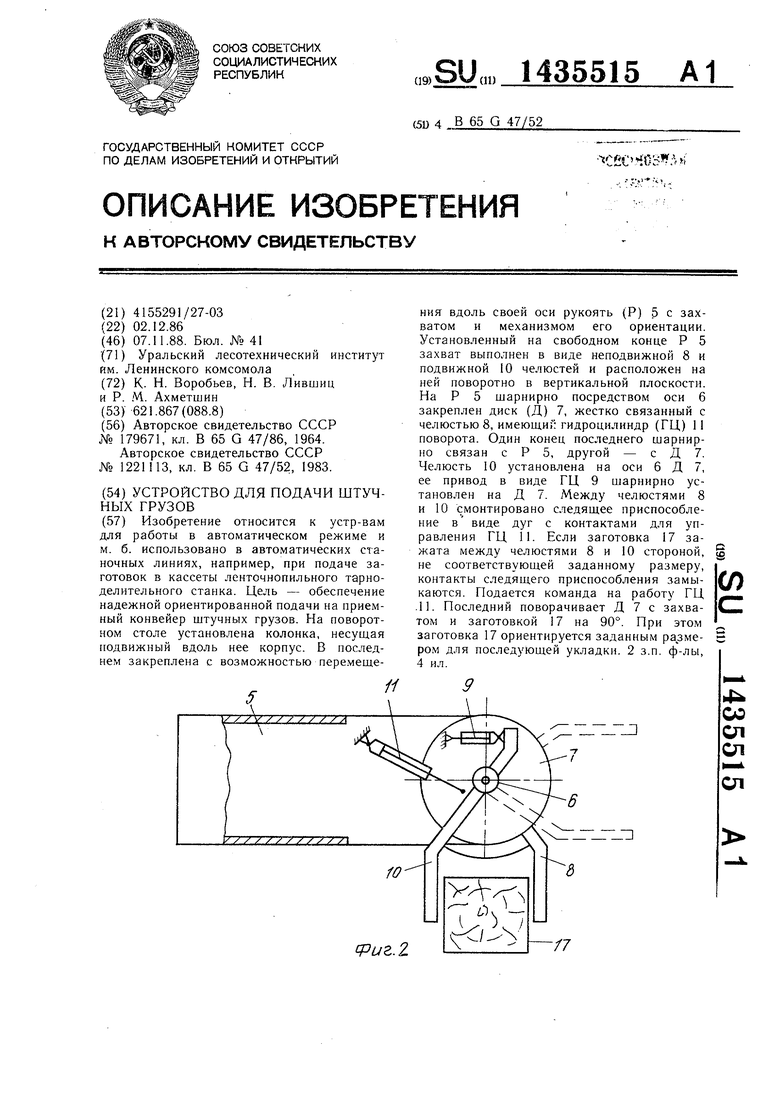
Cpu2.
9аг.1
М17
РагЛ
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ | 0 |
|
SU179671A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1983 |
|
SU1221113A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
