Изобретение относится к подъемно- транспортному машиностроению, а именно к устройствам для перегрузки штучных грузов со стеллажа на подвесной конвейер или с конвейера на прнста- ночный накопитель и т.п.
Цель изобретения - повышение надежности и долговечности путем снижения износа направляющих за счет равномерного распределения нагрузки между катками каретки.
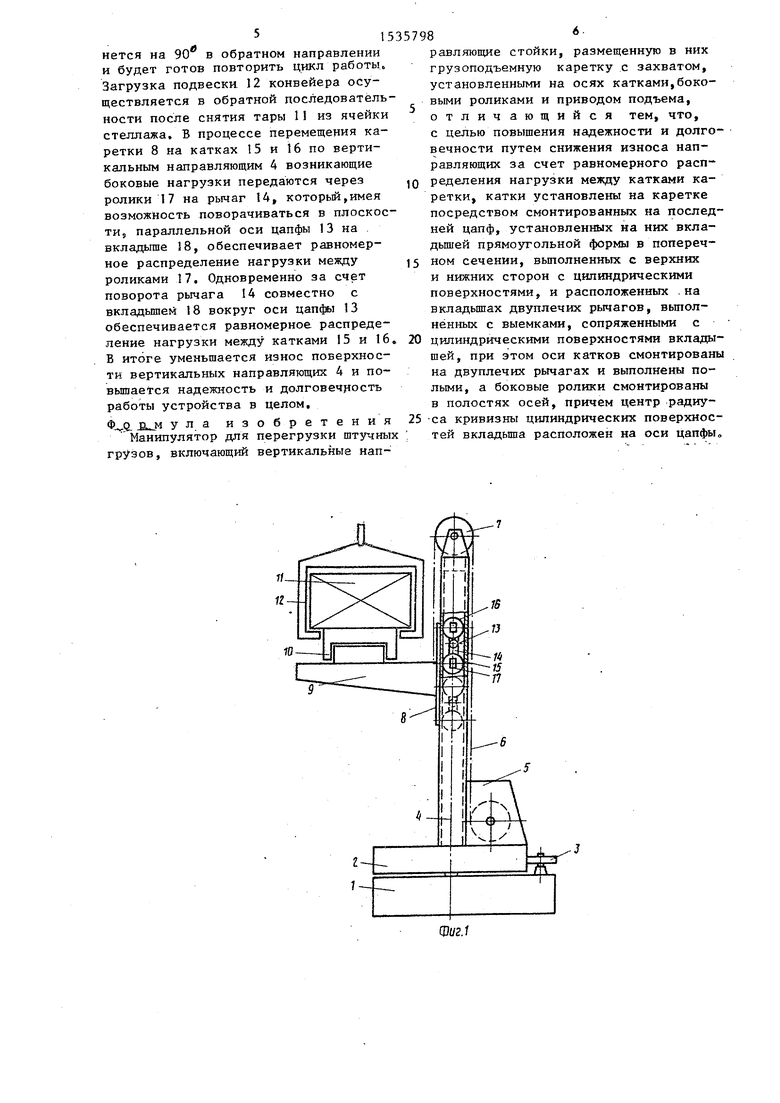
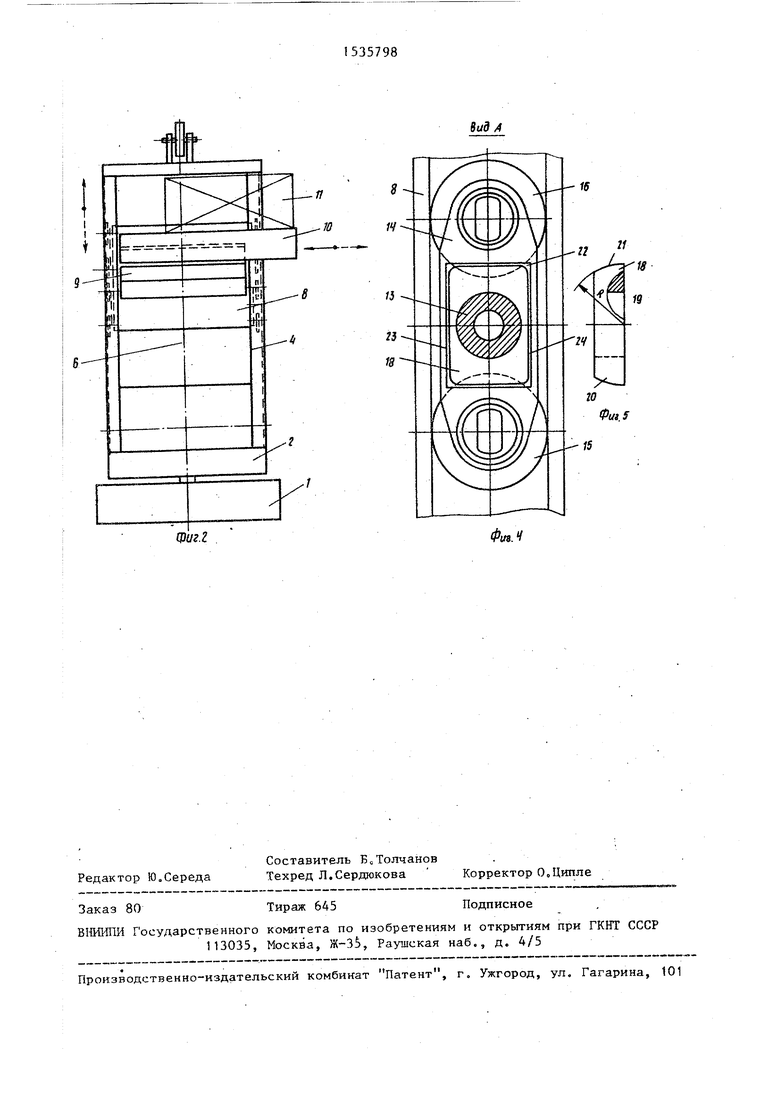
На фнг.1 схематично изображен пред лаг аепый манипулятор дпч перегрузки штучных грузов; на фиг.2 - то же,
виц спереди; на фш , э - узеп установки дпухплечего рычага с катками на цапфе каретки; па фиг. 4 - вид А на фиг,1; на фиг. 5 - г-кладыга, вид сбоку.
Манипулятор для перегрузки штучных грузов содержит основание 1, смонти- ронаннуго на вертикальной оси пот орот- ную платформу 2, привод 3 поворота, раму с вертикальным1 направляющими 4, механизм 5 подъема, грузовой канат 6, перекинутый через блок 7 и связанный с грузоподъемной кареткой 8, имеющей консоль 9 с захватом 10, выполненным телескопическим. Затаренный груз 11 передается на подвески 12 подвесного конвейера. Сбоку каретки 8 имеются цапфы 13, на которых балансирно смонтированы двухплечие рычаги 14, несущие на концах полые оси для катков 15 и 16 со вс троеннь - мн в полостях осей боковыми роликами 17. На цчпфах 13 установлены вилады5
0
0
5
0
5
ши 18, имеюшие отверстия 19, под диаметр цапфы 13 и в поперечном селении выполнены прямоугольной формы. На верхних и нижних концах вкладыш 18 выполнен с цилиндрическими поверхностями 20 и 21, радиус кривизны R которых имеет центр на оси цапфы 13, В теле рычага 14 имеется выемка 22 ответной формы, с боковыми стенками которой сопрягаются плоские поверхности 23 и 24 вкладыша 18.
Такое исполнение вкладыша и двуплечего рычага обеспечивает строго фиксированный поворот на цапфе рычага с катками в двух взаимно перпендикулярных плоскостях, что крайне необходимо для обеспечения работоспособности устройства в целом и для достижения поставленной цели.
Устройство работает следующим образом.
При подходе подвески 12 конвейера с тарным грузом 1 к позиции манипулятора каретка 8 с захватом 10 поднимается с помощью грузоподъемного механизма 5 и площадка секции захвата 10 приподнимает тару 11, снимая ее с лап подвески 12. Затем происходит поворот платформы 2 от привода 3 на угол 90° и за счет перемещения секций телескопического захвата 10 груз 11 перемещается в ячейку сталла- жа или пристаночного накопителя,После опускания каретки 8 на некоторую величину тарный груз 1 будет положен на полки ячейки стеллажа или накопителя. СРКЦИИ захвата 10 развратятся в исходное положение, а манипулятор повер
51
нется на 90 в обратном направлении и будет готов повторить цикл работы.
Загрузка подвески 12 конвейера осуществляется в обратной последовательности после снятия тары 11 из ячейки стеллажа. В процессе перемещения каретки 8 на катках 15 и 16 по вертикальным направляющим 4 возникающие боковые нагрузки передаются через ролики 17 на рычаг 14, который,имея возможность поворачиваться в плоскости, параллельной оси цапфы 13 на акладыше 18, обеспечивает равномерное распределение нагрузки между роликами 17. Одновременно за счет поворота рычага 14 совместно с вкладышем 18 вокруг оси цапфы 13 обеспечивается равномерное распреде- пение нагрузки между катками 15 и 16 В итоге уменьшается износ поверхности вертикальных направляющих 4 и повышается надежность и долговечность работы устройства в целом.
Ф-Л ула изобретения
Манипулятор для перегрузки штучны грузов, включающий вертикальные нап
0
5
0
5
равняющие стойки, размещенную в них грузоподъемную каретку с захватом, установленными на осях катками,боковыми роликами и приводом подъема, отличающийся тем, что, с целью повышения надежности и долговечности путем снижения износа направляющих за счет равномерного распределения нагрузки между катками каретки, катки установлены на каретке посредством смонтированных на последней цапф, установленных на них вкладышей прямоугольной формы в поперечном сечении, выполненных с верхних и нижних сторон с цилиндрическими поверхностями, и расположенных на вкладышах двуплечих рычагов, выполненных с выемками, сопряженными с цилиндрическими поверхностями вкладышей, при этом оси катков смонтированы на двуплечих рычагах и выполнены полыми, а боковые ролики смонтированы в полостях осей, причем центр радиуса кривизны цилиндрических поверхностей вкладыша расположен на оси цапфы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для перегрузки штучных грузов | 1989 |
|
SU1643349A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Склад для хранения штучных грузов | 1982 |
|
SU1030265A1 |
| БАЛАНСИРНОЕ УСТРОЙСТВО ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 1992 |
|
RU2026263C1 |
| МЕХАНИЗИРОВАННЫЙ СКЛАД | 1989 |
|
RU2033377C1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1980 |
|
SU967929A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Конвейер для транспортировки и перегрузки штучных грузов | 1972 |
|
SU540779A1 |
Изобретение относится к подъемно-транспортному машиностроению и позволяет повысить надежность и долговечность путем снижения износа направляющих за счет равномерного распределения перегрузки между катками каретки. Манипулятор включает вертикальные направляющие стойки 4 и размещенную в них грузоподъемную каретку (ГК) 8 с захватом и приводом подъема. На ГК 8 смонтированы цапфы 13, на которых установлены вкладыши (В) 18 прямоугольной формы с цилиндрическими поверхностями на верхней и нижней сторонах. На В 18 установлены двуплечие рычаги (ДР) 14 с выемками под цилиндрические поверхности В 18. На ДР 14 смонтированы полые оси для катков 15, 16. В полостях осей укреплены боковые ролики 17. Центр радиуса кривизны цилиндрических поверхностей В 18 расположен на оси цапфы 13. Груз передается на подвески подвесного конвейера или снимается с подвески. При подъеме ГК 8 она захватом снимает груз с подвесок, поворачивается и опускается с ним к месту приема. При перемещении ГК 8 по направляющим стойкам 4 боковые нагрузки передаются через ролики 17 на ДР 14, который поворачивается на В 18 в плоскости, параллельной оси цапфы 13, что обеспечивает равномерное распределение нагрузок на ролики 17. За счет поворота ДР 14 совместно с В 18 вокруг цапфы 13 обеспечивается равномерное распределение нагрузки между катками 15, 16. 5 ил.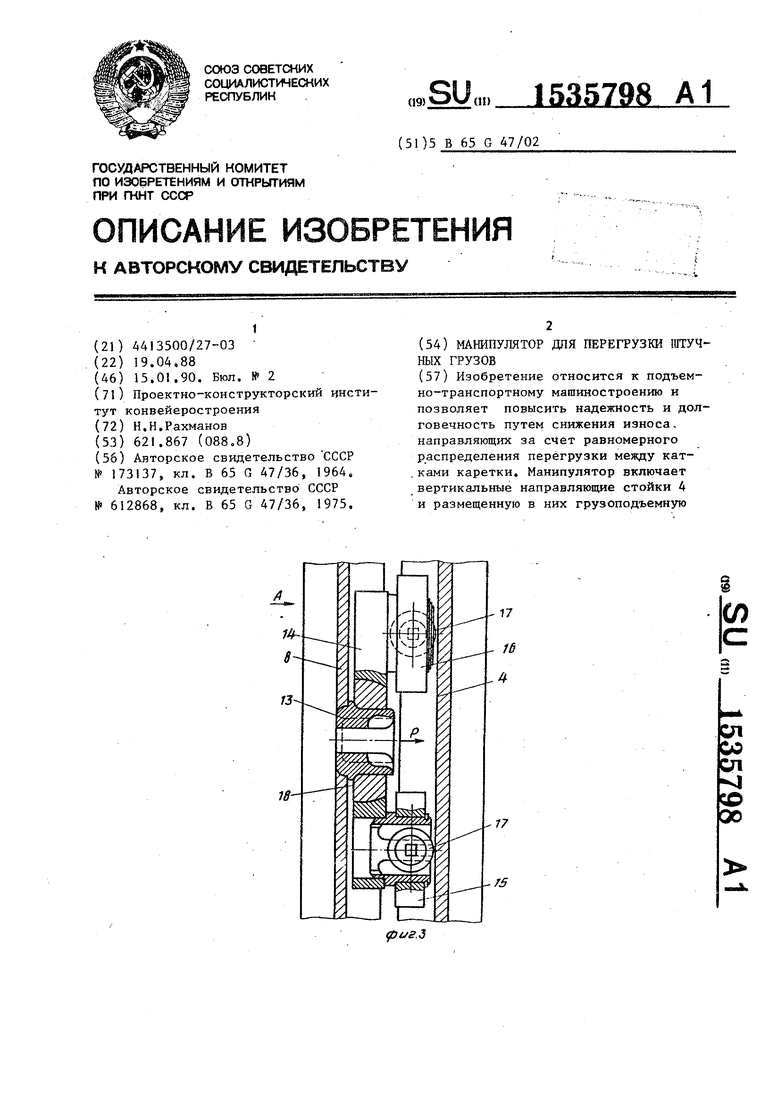
Tf.
1 г - -Я
гггг
Ю
-Я
х
Фуг7
Редактор Ю.Середа
Составитель Б0Топчанов
Техред Л.Сердюкова Корректор О.Ципле
Заказ 80
Тираж 645
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
5ud A
/V
/3
Фи.Ч
Подписное
| УСТРОЙСТВО для НАВЕШИВАНИЯ И СЪЕЛи ПРИКРЕПЛЕННБ1Х К ТРАВЕРСЕ ГРУЗОВ С КРЮКОВ ГРУЗОВЫХ ТЕЛЕЖЕК НОДВЕСНОГО ТОЛКАЮЩЕГОКОНВЕЙЕРА | 0 |
|
SU173137A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
