(21)3944114/40-11
(22)19.08.85
(46) 07.07.88. Бкш. № 25 (72) Р.И.Янбулатов, В.Н.Колычков и С.И.Акохов (53) 621.86.061 (088.8) (56) Козырей Ю.Г. Промыгаленные роботы. Справочник. - М.: Машиностроение, 1983, с. 160, рис. 416.
(54) ЗАХВАТНОЕ УСТРОЙСТВО (57) Изобретение относится к подъемно-транспортному оборудованию, в частности к захватным устройствам. Целью изобретения является уменьшение энергозатрат. Силовой цилиндр 2 подводит двуплечие рычаги 3 к грузу- мешку. Сжимается последний зажимными губками 6 при переходе тяг 4 мертвого положения и срабатывании конечного пневмопереключателя 8 при контакте с планкой 11. 1 ип.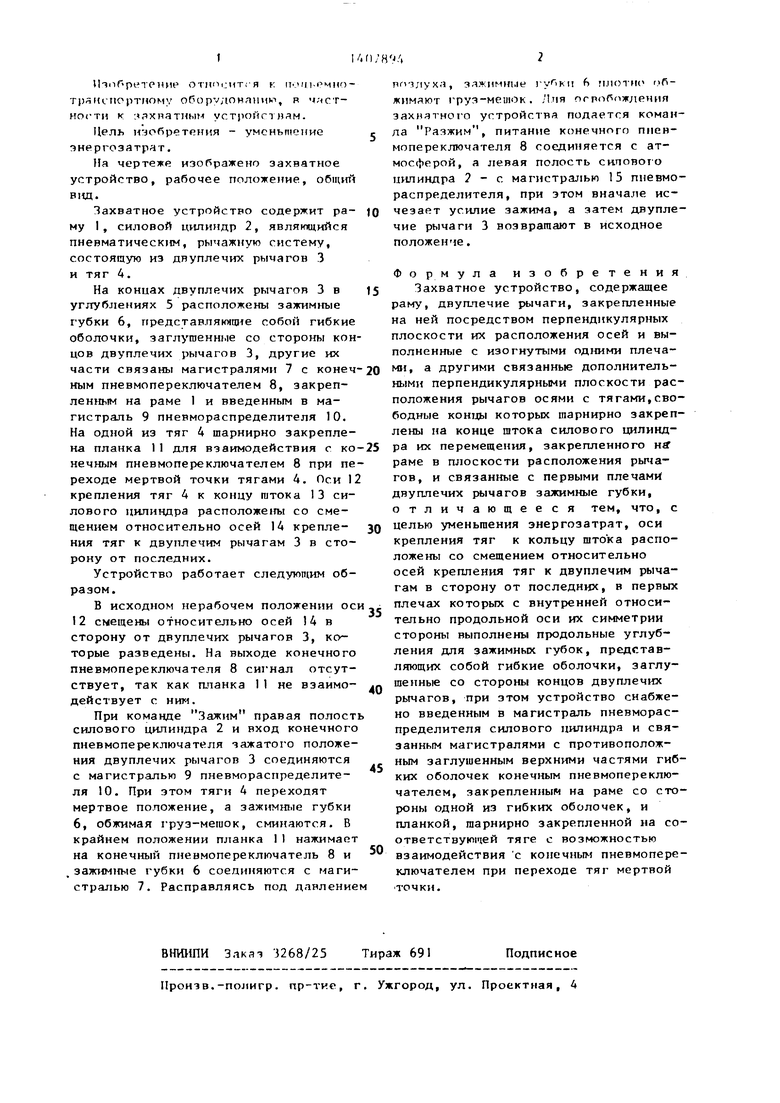
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для обработки деревянных заготовок | 1983 |
|
SU1155445A1 |
| Грузозахватное устройство | 1987 |
|
SU1497147A1 |
| Грузозахватное устройство | 1987 |
|
SU1491799A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| Станок для обработки заготовок ручек ножей | 1985 |
|
SU1308476A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Захват-кантователь для рулонов листовой стали | 1979 |
|
SU977354A1 |
(Л
ИтпГ ретоние отм чсчтся к П :и|ьрми(1- тряисиортмому оборулонаним, в иостн к ;«яхпатиыи устройпнлм.
Цель нчобретения - уменьшение
энергозатрат.
я чертеже изоРражено захватное устройство, рабочее положение, o6iuirii вид.
Захватное устройство содержит ра- му I, силовой цилиндр 2, являющийся пневматическим, рычажную систему, состоящую из днуплеч1гх рычагов 3 и тяг 4.
На концах двуплечих рычагов 3 в углублениях 5 расположены зажимные губки 6, представлякнщ1е собой гибкие оболочки, заглушенные со стороны концов двуплечих рычагов 3, другие их части связаны магистралями 7 с конеч ным пневмопереключатепем 8, закрепленным на раме 1 и введенным в магистраль 9 пневмораспределителя 10. На одной из тяг 4 шарнирно закреплена планка 11 для взаимодействия с ко нечным пневмопереключателем 8 при переходе мертвой точки тягами 4. Оси 12 крепления тяг 4 к концу штока 13 силового цилиндра расположе1ты со смещением относительно осей 14 крепле- ния тяг к двуплечим рычагам 3 в сторону от последних.
Устройство работает следующим образом.
В исходном нерабочем положении ос 12 смещены относительно осей 14 в сторону от двуплечих рычагов 3, ко торые разведены. На выходе конечного пневмопереключателя 8 сигнал отсутствует, так как планка 11 не взаимо- действует с ним.
При команде Зажим правая полост силового цилиндра 2 и вход конечного пневмопереключателя зажатого положения двуплечих рычагов 3 соединяются с магистралью 9 пневмораспределителя 10. При этом тяги 4 переходят мертвое положение, а зажимшпе губки 6, обжимая груз-мешок, сминаются. В крайнем положении планка 11 нажимает на конечный пневмопереключатель 8 и ,зажимные губки 6 соединяются с магистралью 7. Расправляясь под давление
г
Q
5 0 5 О
Q
5
5
p :ijiyх.ч, зяжимные ) уПки в плотмс (обжимают груз-меток. /1т1Я огр(1Рс жденип захнятного устройства подается команда Разжим, питание конечного пневмопереключателя 8 соединяется с атмосферой, а левая полость сиповот О цилиндра 2-е магистралью 15 пневмораспределителя, при этом вначале исчезает усилие зажима, а затем двуплечие рычаги 3 возвращают в исходное положенче.
Формула изобретения
Захватное устройство, содержащее раму, двуплечие рычаги, закрепленные на ней посредством перпендикулярных плоскости их расположения осей и выполненные с изогнутыми одними плечами, а другими связанные дополнительными перпендикулярными плоскости расположения рычагов осями с тягами,свободные КОН1ДЫ которых шарнирно закреплены на конце штока силового цилиндра их перемещения, закрепленного н раме в плоскости расположения рьша- гов, и связанные с первыми плечами двуплечих рычагов зажимные губки, отличающееся тем, что, с целью уменьшения энергозатрат, оси крепления тяг к кольцу штока расположены со смещением относительно осей крепления тяг к двуплечим рычагам в сторону от последних, в первых плечах которых с внутренней относительно продольной оси их симметрии стороны выполнены продольные углубления для зажимных губок, представляющих собой гибкие оболочки, заглушенные со стороны концов двуплечих рычагов, при зтом устройство снабжено введенным в магистраль пневмораспределителя силового цилиндра и связанным магистралями с противоположным заглушенным верхними частями гибких оболочек конечным пневмопереключателем, закрепленным на раме со стороны одной из гибких оболочек, и планкой, шарнирно закрепленной на со- ответствую1чей тяге с возможностью взаимодействия с конечным пневмопереключателем при переходе тяг мертвой
ТОЧКИ.
