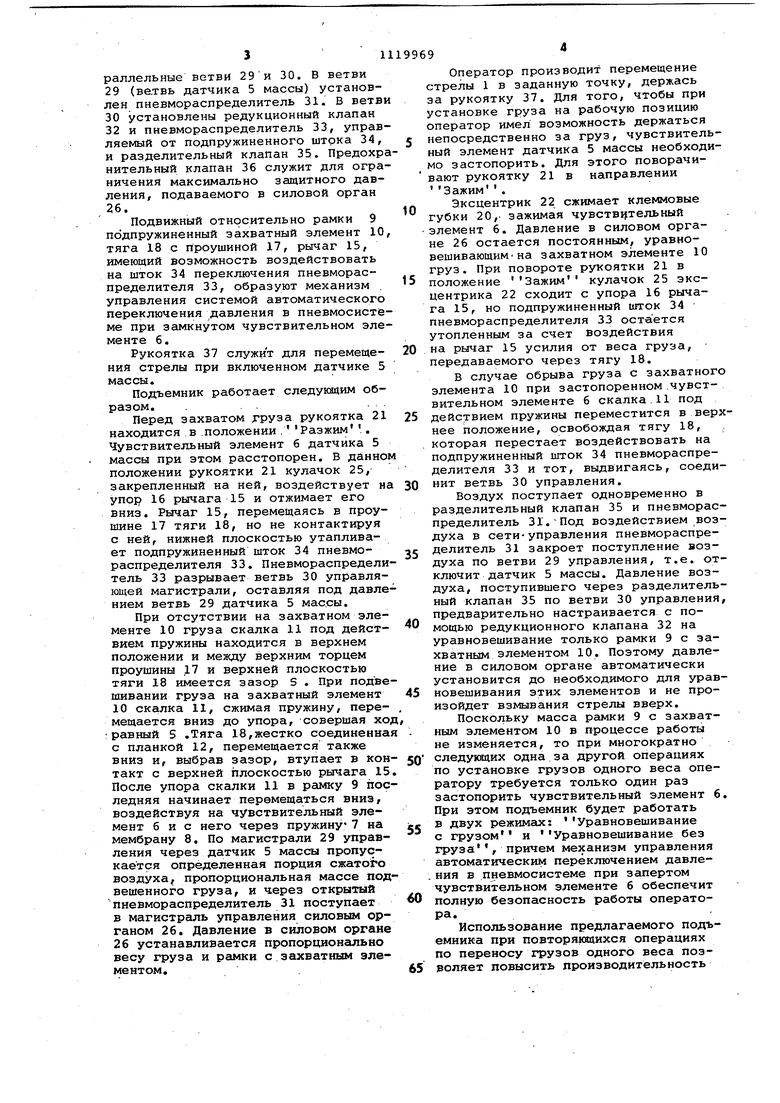
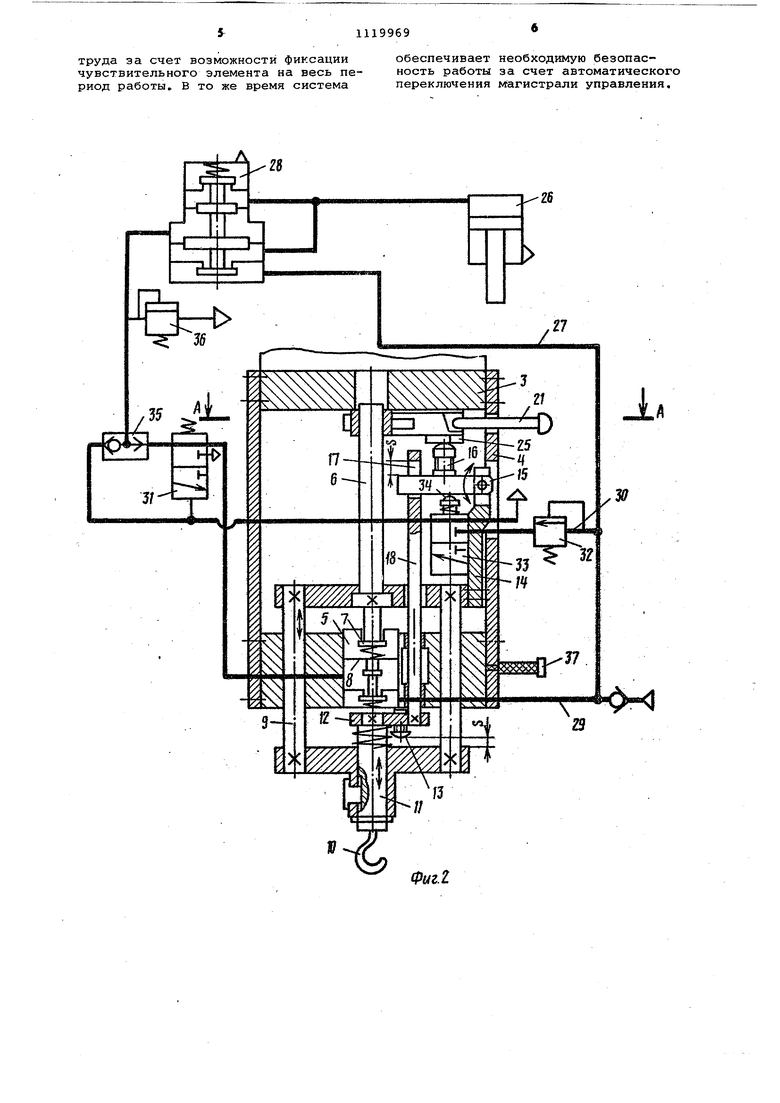
Изобретение относится к подъемно транспортным механизмам, а именно к уравновешивающим подъемникам. Известен уравновешивающи подъем ник, содержащий грузовую стрелу, не сущую грузозахватный орган, систему управления подъемником, имеющую источник сжатого воздуха, соединенный с силовым органом посредством напорной магистрали,в которой установ лен усилитель мощности, соединенный с магистралью управления, снабженно датчиком массы, установленным вмест с усилителем мощности последовательно в магистрали управления, при этом система имеет трехлинейный распределитель и редукционный кладан, установленные в магистрали управления параллельно датчику массы, соединенному с одним из входов распределителя, с другим входом которого соединен редукционный клапан, а с выходом - усилитель .мощности tilНедостатком известного подъемника является сравнительно низкая производительность его работы. Кроме того известная система не исключает возможности взмывания стрелы при обрыве груза с грузозахватного органа. Наиболее близким техническим решением к предлагаемому является уравновешивающий подъемник, содержащий грузовую стрелу, несущую грузозахватный орган, снабженный рамкой, датчик массы с чувствительным элементом и стопором чувствительного элемента, выполненным с рукояткой, пневмосистему, включающую силовой орган, распределитель и редукционный клапан, установленный в магистрали управления силовым органом 21. Недостатком известного устройства является его низкая производительность при манипулировании с грузами одинаковой массы и, кроме того, в данном устройстве не исключается возможность взмывания стрелы при обрыве груза. Цель изобретения - повышение производительности труда путем автомати зации процесса уравновешивания и безопасности работы. Для достижения указанной цели в уравновешивакядем подъемнике, содержащим грузовую стрелу, несущую грузо захватный орган, снабженный рамкой, датчик массы с чувствительным элемен том и стопором чувствительного элемента, выполненным с рукояткой, пнев мосистему, включающую силовой орган, распределитель и редукционный клапан установленный в магистрали управления силовым органом, указанная рукоятка имеет кулачок, а пневмосистема снабжена механизмом автоматического переключения давления в магистрали управления, состоящим из рычага, закрепленного на рамке, и тяги с прорезью, при этом свободный конец рычага размещен в прорези тяги, другой конец которой жестко связан при помощи подпружиненной скалки с грузозахватным органом, причем на верхней плоскости рычага установлен упор, взаимодействующий с кулачком рукоятки, а в магистрали управления установлен дополнительный распределитель со штоком для взаимодействия с нижней плоскостью рычага. На фиг. 1 приведена схема уравновешивающего подъемника; на фиг. 2 принципиальная схема системы управления подъемника; на фиг. 3 - сечение А-А на фиг. 2. Уравновешивающий подъемник содержит грузовую стрелу 1, закрепленную на стойке 2. На конце стрелы 1 шарнирно установлен кронштейн 3 с тягами 4, на которых неподвижно закреп-, лен датчик.5.массы..Датчик.5.имеет. чувствительный..элемент 6, кот.орый посредством .пружины 7 соединен с. мембраной 8. На .датчике 5 подвешен грузозахватный орган, выполненный . в виде рамкИ 9, которая опирается на чувствительный элемент б и может перемещаться вместе с ним в направляющих корпуса датчика 5 -массы относительно грузовой стрелы 1. Снизу рамка 9 снабжена.захватным элементом 10, состоящим из подвижной и подпружиненной относительно рамки 9 скалки 11, на нижнем конце имеющей крюк,а на верхнем - закрепленную планку 12 с упором 13. . На рамке 9 крепится кронштейн 14, на котором на оси установлен рычаг 15, снабженный регулируемым упором 16. Рычаг 15 свободно входит в проушину 17 тяги 18, жестко соединенной с планкой 12 скалки 11. Подъемник имеет стопор чувствительного элемента б относительно корпуса датчика 5, выполненный в виде клеммного соединения чувствительного элемента 6 с планкой 19, неподвижно закрепленной на кронштейне 3. Зажим клеммовых губок 20 осуществляется посредством рукоятки 21, оканчивающейся эксцентриком 22, закрепленным на оси 23 болта 24, вставленного в отверстие клеммовых губок 20. На рукоятке 21 эксцентрика 22 закреплен кулачок 25, имеющий возможность взаимодействовать с регулируемым упором 16 рычага 15. Пневмосистема управления уравновешивающим подъемником включает силовой орган 26, связанный посредством напорной магистрали 27 с пневмостанцией. В напорной магистрали 27 установлен усилитель 28 мощности. От напорной магистрали 27 ответвляется магистраль управления, имеющая две параллельные ветви 29 и 30. В ветви
29(ветвь датчика 5 массы) установлен пневмораспределитель 31. В ветви
30установлены редукционный клапан 32 и пневмораспределитель 33, управляемый от подпружиненного штока 34, и разделительный клапан 35. Предохранительный клапан 36 служит для ограничения максимально защитного давления, подаваемого в силовой орган
26.
Подвижный относительно рамки 9 подпружиненный захватный элемент 10, тяга 18 с проушиной 17, рычаг 15, имеющий возможность воздействовать на шток 34 переключения пневмораспределителя 33, образуют механизм . управления системой автоматического переключения давления в пневмосистеме при замкнутом чувствительном элементе 6.
Рукоятка 37 служит для перемещения стрелы при включенном датчике 5 массы.
Подъемник работает следукядим образом. . . .
Перед захватом груза рукоятка 21 находится в.положении.Разжим . Чувствительный элемент 6 датчика 5 массы при этом расстопорен. В данном положении рукоятки 21 кулачок 25, закрепленный на ней, воздействует на упор 16 рычага 15 и отжимает его вниз. Рычаг 15, перемещаясь в проушине 17 тяги 18, но не контактируя с ней, нижней плоскостью утапливает подпружиненный шток 34 пневмораспределителя 33. Пневмораспределитель 33 разрывает ветвь 30 управляющей магистрали, оставляя под давлением ветвь 29 датчика 5 мас.сы.
При отсутствии на захватном элементе 10 груза скалка 11 под деиствием пружины находится в верхнем положении и между верхним торцем проушины 17 и верхней плоскостью тяги 18 имеется зазор S . При подвешивании груза на захватный элемент 10 скалка 11, сжимая пружину, перемещается вниз до упора, совершая ход :равный 5 .Тяга 18,жестко соединенная с планкой 12, перемещается также вниз и, выбрав зазор, втупает в контакт с верхней плоскостью рычага 15. После упора скалки 11 в pciMxy 9 последняя начинает перемещаться вниз, воздействуя на чувствительный элемент бис него через пружину- 7 на мембрану 8. По магистрали 29 управления через датчик 5 массы пропускается определенная порция CKaToio воздуха, пропорциональная массе подвешенного груза, и через открытый пневмораспределитель 31 поступает в магистраль управления силовым органом 26. Давление в силовом органе 26 устанавливается пропорционально весу груза и рамки с захватным элементом.
Оператор производит перемещение стрелы 1 в заданную точку, держась за рукоятку 37. Для того, чтобы при установке груза на рабочую позицию оператор имел возможность держаться непосредственно за груз, чувствительный элемент датчика 5 массы необходимо застопорить. Для этого поворачивают рукоятку 21 в направлении Зажим.
Эксцентрик 22 сжимает клеммовые губки 20, зажимая чувствительный элемент 6. Давление в силовом органе 26 остается постоянным, уравновешивающим- на захватном элементе 10 груз. При повороте рукоятки 21 в положение Зажим кулачок 25 эксцентрика 22 сходит с упора 16 рычага 15, но подпружиненный шток 34 пневмораспределителя 33 остается утопленным за счет воздействия на рычаг 15 усилия от веса груза, передаваемого через тягу 18.
В случае обрыва груза с захватного элемента 10 при застопоренном .чувствительном элементе 6 скалка.11 под действием пружины переместится в верхнее положение, освобождая тягу 18, которая перестает воздействовать на подпружиненный шток 34 пневмораспределителя 33 и тот, выдвигаясь, соединит ветвь 30 управления.
Воздух поступает одновременно в разделительный клапан 35 и пневмораспределитель 31.-Под воздействием воздуха в сети-управления пневмораспределитель 31 закроет поступление воздуха по ветви 29 управления, т.е. отключит датчик 5 массы. Давление воздуха, поступившего через разделительный клапан 35 по ветви 30 управления, предварительно настраивается с помощью редукционного клапана 32 на уравновешивание только рамки 9 с захватным элементом 10. Поэтому давление в силовом органе автоматически установится до необходимого для уравновешивания этих элементов и не произойдет взмывания стрелы вверх.
Поскольку масса рамки 9 с захватным элементом 10 в процессе работы не изменяется, то при многократно следуквдих одна за другой операциях по установке грузов одного веса оператору требуется только один раз застопорить чувствительный элемент 6. При этом подъемник будет работать
Уравновешивание
в двух режимах:
с грузом и Уравновешивание без груза, причем механизм управления автоматическим переключением давления в пневмосистеме при запертом чувствительном элементе 6 обеспечит полную безопасность работы оператора.
Использование предлагаемого подъемника при повторяккцихся операциях по переносу 1ТРУЗОВ одного веса позволяет повысить производительность
труда за счет возможности фиксации чувствительного элемента на весь период работы, В то же время система
обеспечивает необходимую безопасность работы за счет автоматического переключения магистрали управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Уравновешивающий подъемник | 1984 |
|
SU1184799A1 |
| Уравновешивающий подъемник | 1977 |
|
SU751787A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
УРАВНОВЕШИВАЮЩИЙ ПОДЪЕМНИК, содержащий грузовую стрелу, несущую захватный орган, снабженный рамкой, датчик массы с чувствительным эле- . ментом и стопором чувствительного элемента, выполненным с рукояткой, пневмосистему, включающую силовой орган, распределитель и редукционный клапан, установленный в магистts , рали управления силовым органом, отличающийс я тем, что, с целью повышения производительности труда путем автоматизации процесса уравновешивания и безопасности работы, указанная рукоятка имеет кулачок, а пневмосистема снабжена механизмом автоматического переключения давления в магистрали управления, состоящим из рычага,закрепленного на рамке, и тяги с прорезью, при этом свободный конец рычага размещен в прорези тяги, другой конец которой жестко связан при помощи подпружиненной скалки с грузозахватным органом, причем на верхней плоскости рычага установлен упор, взаимодействующий с кулачком рукоятки, .а Л С в магистрали управления установлен дополнительный распределитель со штоком для взаимодействия с нижней плоскостью рычага.: со СО О) со Фп.1
19
А-Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
