Изобретение относится к устройствам формирования управляющих воздействий в функции времени (т.е. к нелинейным корректирующим фильтрам) и может найти широкое применение в , системах управления технологическими процессами, а именно в приводах механизмов циклического действия с относительно большим временем неустановившихся процессов (пуск,то1эможение), например, карьерных экскаваторов, прокатных станов, лифтов подъемных кранов и др.
По основному авт.св. № 855604 известен нелинейный фильтр для систем автоматического управления, содержащий последовательно соединенные задатчик, первый и второй огранчители и первый и второй интеграторы, выход первого интегратора подкл чен к второму входу второго ограничтеля и через пропорциональный усилитель - к второму входу первого ограничителя, а выход второго интегратора подключен к третьему входу первого ограничителяЦ.
Недостатком известного фильтра является низкое быстродействие. Цель изобретения - повышение быстродействия фильтра за счет обеспечения оптимальных переходных процессов при малых входных сигналах.
Поставленная цель достигается тем,, что в нелинейный фильтр для, систем .автоматического регулирования дополнительно введены третий ограничитель, два блока односторонней проводимости, переключатель и второй и третий пропорциональные усилители,причем выход задатчика соединен с первым входом первого ограничителя через переключатель, выход второго интегратора соединен с четвертым входом первого ограни-i чителя через последовательно сое- диненные третий ограничитель, переключатель и параллельно соединенные выходами первый и второй блоки односторонней проводимости, выход задатчика соединен с вторым входом третьего ограничителя через второй пропорциональный усилитель, а выход второго интегратора соединен с третим входом первого ограничителя чере третий пропорциональный усилитель, I
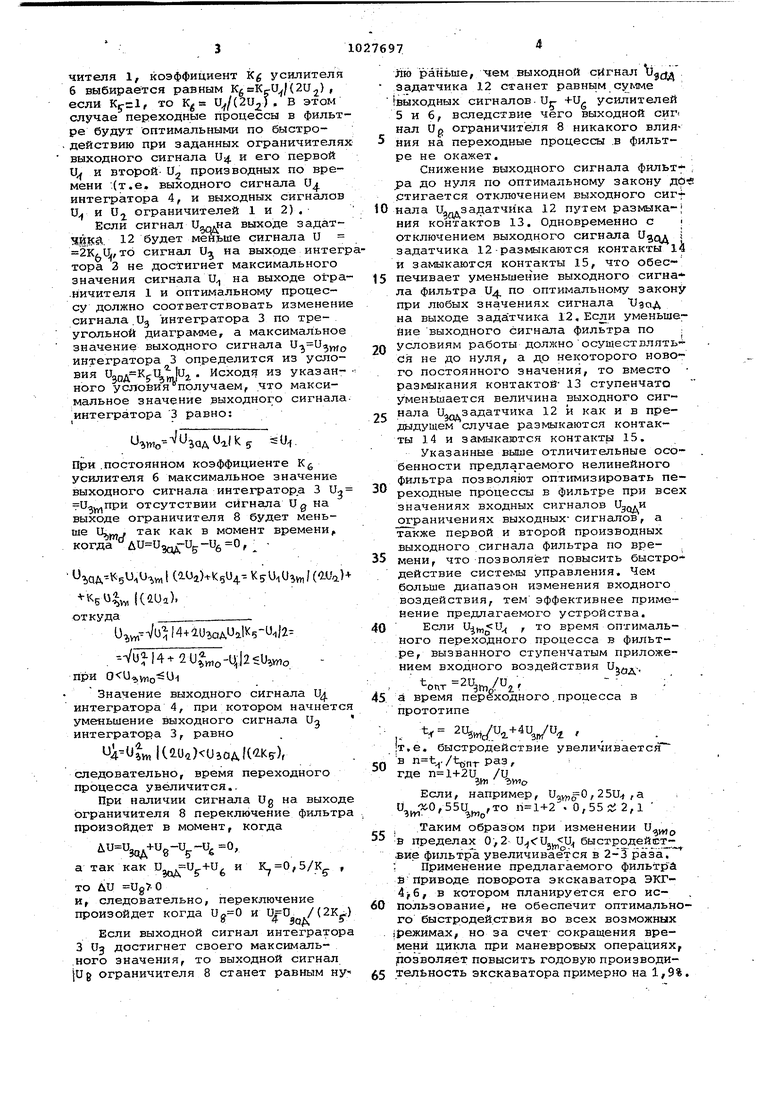
На фиг. 1 представлена блок-схема устройства; на фиг, 2 - эпюры напряжений, иллюстрирующие работу устройства.
Устройство содержит первый и второй ограничители 1 и 2, первый и второй интеграторы 3 и 4, третий, первый и второй пропорциональные усилители 5,6 и 7, третий ограничитель 8, переключатель 9, первый и второй блоки 10 и 11 односторонней проводимости, задатчик
12, первые и вторые замыкающие контакта 13 и 14 переключателя 9, размыкающие контакты 15, переключателя 9.
Устройство работает следующим образом.
Включение устройства в работе осуществляется замыканием контактов 13 и 14 и размыканием контактов 15 переключателя 9. При этом на вход ограничителя 1 -подаются постоянный сигНад выхода задатчика 12,равный (или пропорциональный) максимальному заданному значению выходного сигнала 04 ,и выходные сигналы усилителей 5 и 6 и ограничителя 8. Коэффициенты К и К усилителей 5 и 6 выбираются в зависимости от требований к характеристикам фильтра,а коэффициент усилителя 7 выбирается из условия К 0,5/К5- , выходной сигнал ограничителя 8 Ug по абсолютной величине равен половине максимально возможного сигнала С дзадатчика 12. В частности, коэффициент Kg усилителя 5 может быть равен едини- це и тогда максимальное значение выходного сигнала и. будет равно tLn.,
На входе ограничителя 1 будет формироватря разность AU UjQ fUg-U5-- -Ug. Так как в начальный момент времени разность и U70, то на выходе ограничителя 1 будет постоянный сигнал и, а на выходе ограничителя 2 сигнал и. Следовательно, выходные сигналы интеграторов 3 и 4 будут увеличиваться; сигнал Ug на выходе интегратора 3 по линейному закону, а сигнал U4. на выходе интегратора 4 по параболе до тех пор, пока выходной сигнал и, интегратора 3 не станет равным сигналу и на выходе ограничителя 1,, После этого выходной сигнал Uj интегратора 3 остается постоянным равным по величине выходному сигналу U ограничителя 1, 5 3. ВЫХОДНОЙ сигна;л Ux интегратора 4 будет увеличиваться по линейному закону.
В момент времени, когда на входе ограничителя 1 разность ди изменит знак,, поменяются знаки на выходах ограничителя 1 и ограничителя 2. В результате выходной сигнал U интегратора 3 начнет уменьшаться по линейному закону, а сигнал U на выходе интегратора 4 начнет приближаться по параболе к заданному максимальному значению.Для того, чтобы сигнал Uvj на выходе интегратора 3 стал равным нулю в тот момент, когда .выходной ,сигнал Чд интегратора 4 станет равным сигналу Uj..Ha выходе задатчика 12,при условии, что в процессе работы фильтра выходной сигнал и интегратора 3 должен достигать максимального значения, равного выходному сигналу 0 ограничителя 1, коэффициент К усилителя 6 выбирается равным (2Uj) , если Kg-rl, то Kg (2U2) , В этом случае переходные процессы в фильт ре будут оптимальными по быстродействию при заданных ограничителя выходного сигнала 04 и его первой и и второй- Uj производных по времени .(т.е. выходного сигнала 0 интегратора 4, и выходных сигналов 0 и и ограничителей 1 и 2) . Если сигнал выходе задатTJgKsl. 12 будет меньше сигнала U 2K/li, то сигнал U на выходе интег тора 3 не достигнет максимального значения сигнала и на выходе ot-p .ничителя 1 и оптимальному процессу должно соответствовать изменени сигнала Ug интегратора 3 по треугольной диаграмме, а максимальное значение выходного сигнала U.j U;jyj, интегратора 3 определится из условия , . Исходя из указанного условия получаем, что максимальное значение выходного сигнала интегратора 3 равно: U. При .постоянном коэффициенте К усилителя 6 максимальное значение выходного сигнала интегратора 3 Ш отсутствии сигнала U Q на выходе ограничителя 8 будет меньше и,„ так как в момент времени когда °ди идод-ир- б ° . .KgU,O KiOib 54 ,, (aUa) ). откуда. и,, l4 lUгaAUal -U-1l2. --VDjj4 2U - J2 U,mo при . Значение выходного сигнала U интегратора 4, при котором начнетс уменьшение выходного сигнала U интегратора 3, равно )U5aAl(iK), следовательно, время переходного процесса увеличится.. При наличии сигнала Ug на выход ограничителя 8 переключение фильтр произойдет в момент, когда а так как (,+(, и ,5/К , то ли Ug70. и, следовательно, переключение произойдет когда U. и /(2К.. Зад Если выходной сигнал интегратор 3 Uj достигнет своего максималь.ного значения, то выходной сигнал JUg ограничителя 8 станет равным ну jik) раньше, чем выходной сигнал grf задатчика 12 станет равным сумме (выходных сигналов. Ur- +Ug усилителей 5 и 6, вследствие чего выходной сиг нал Up ограничителя 8 никакого влияния на переходные процессы .в фильтре не окажет. Снижение выходного сигнала фильт ра. до нуля по оптимальному закону дОе стигается отключением выходного сиг4нала и одзадатчика 12 путем размыка-j ния контактов 13. Одновременно с i отключением выходного сигнала j задатчика 12-размыкаются контакты 1 и замыкаются контакты 15, что обес печивает уменьшение выходного сигна ла фильтра U по оптимальному закону при любых значениях сигнала UgoA на выходе задатчика 12, Если уменьшение выходного сигнала фильтра по ; условиям работы должноосу1цествлять ся не до нуля, а до некоторого ново го постоянного значения, то вместо размыкания контактой- 13 ступенчато уменьшается величина выходного сигнала . задатчика 12 и как и в предыдущем случае размыкаются контакты 14 и замыкаются контакты 15. Указанные выше отличительные особенности предлагаемого нелинейного фильтра позволяют оптимизировать переходные процессы в фильтре при всех значениях входных сигналов отграничениях выходных-сигналов, а также первой и второй производных выходного сигнала фильтра по времени, что позволяет повысить быстродействие системы управления. Чем больше диапазон изменения входного воздействия, темэффективнее применение предлагаемого устройства. Если U.:U , то время оптимального переходного процесса в фильтре, вызванного ступенчатым приложением входного воздействия ,/и, -- : а время переходного,процесса в прототипе t ,j , т.е. быстродействие увеличивается в ,./-Ь(птРаз, где /и № ЬУИо Если, например, , 25и.+,а 0,, 55U,то п 1+2-. 0,55-2,1 Таким образом при изменении U,, ,. - лгг; у пределах 0;, 2 быстродейЕТне фильтра увеличивается в 2-3 раэа Применение предлагаемого фильтра Вприводе поворота экскаватора ЭКГ4j6, в котором планируется его использование, не обеспечит оптимальноо быстродействия во всех возможных ежимах, но за счет сокращения вреени цикла при маневровых операциях, озволяет повысить годовую производиельность экскаватора примерно на 1,9%.
i/wd/ ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Устройство управления приводом балансировочного стенда | 1982 |
|
SU1118962A2 |
| Задающее устройство для электропривода | 1986 |
|
SU1410251A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для управления приводом шахтной подъемной машины | 1987 |
|
SU1447743A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Устройство для регулирования угла запаса ведомого сетью инвертора | 1983 |
|
SU1270852A1 |
| Измеритель коэффициента нелинейности пилообразного напряжения | 1980 |
|
SU894607A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Устройство управления приводом балансировочного стенда | 1982 |
|
SU1019396A1 |
НЕЛИНЕЙНЫЙ ФИЛЬТР ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПО авт. св. 855604, отличающий с я тем, что, с целью повышения быстродействия, в нем дополнительно установлены третий ограничитель , дваблока односторонней проводимости, переключатель и второй и третий пропорциональные усилители, причем выход эадатчика соединен с первым входом первого ограничителя через переключатель, выход второго интегратора соединен с четвертым входом первого ограничителя через последовательно соединенные третий ограничитель, переключатель и параллельно соединеные выходами первый и второй блоки односторонней проводимости, выход задатчика соединен с вторым входом третьего огра.ничителя через второй пропорциональный усилитель, а выход второго интегратора сх1единен с третьим входом W первого ограничителя через третий .пропорциональный усилитель.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Нелинейный фильтр для систем автоматического управления | 1979 |
|
SU855604A2 |
