4
ачЛ.
оо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1983 |
|
SU1107240A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1989 |
|
SU1695480A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1977 |
|
SU736349A1 |
| Задающее устройство для электропривода | 1984 |
|
SU1248021A2 |
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Задатчик интенсивности | 1976 |
|
SU738076A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ИНТЕРВАЛ ВРЕМЕНИ | 1991 |
|
RU2032269C1 |
| Система управления положением | 1987 |
|
SU1513415A1 |
Изобретение относится к электротехнике, а именно к электроприводам постоянного тока, в частности к задающим устройствам систем тиристорного управления электроприводами шахтных Подъемных установок, лифтов, канатных дорог и т.По Целью изобретения является улучшение динамических характеристик электропривода. Данное задающее устройство позволяет формировать задающее воздействие, имеющее участок дотягивания перед остановкой исполнитапьного механизма, , участок с нулевым ускорением. Достигается это ограничением входного управля- кнцего сигнала до величины, соответствующей- скорости дотягивания в момент начала замедления. Использование изобретения позволяет улучшить динамические характеристики электропривода путем формирования диаграммы задающего воздействия с ограничением ускорений и рывков, 2 ил. о со (Л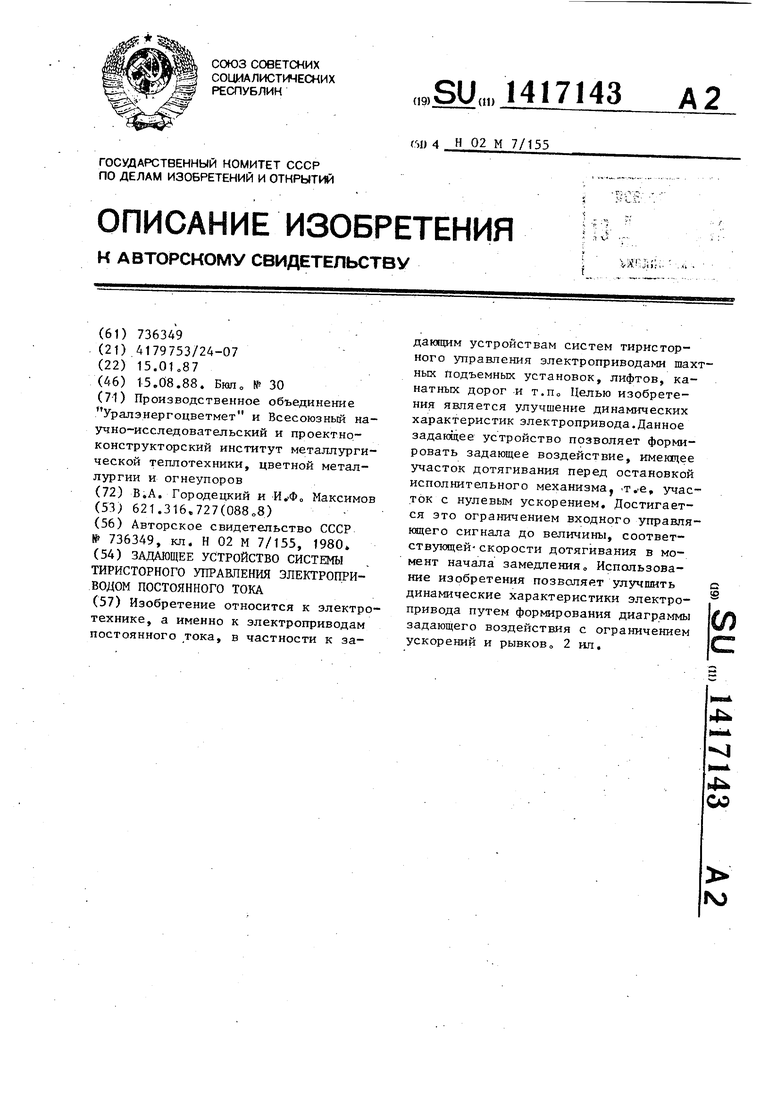
К)
1
Изобретение относится к электротехнике, а именно к электроприводам постоянного тока, в частности к за- дакхдим устройствам систем тиристор- ного управления электроприводами шахтных подъемных установок, лифтов и канатных дорог
Цель изобретения - улучшение динамических характеристик электропри йода.
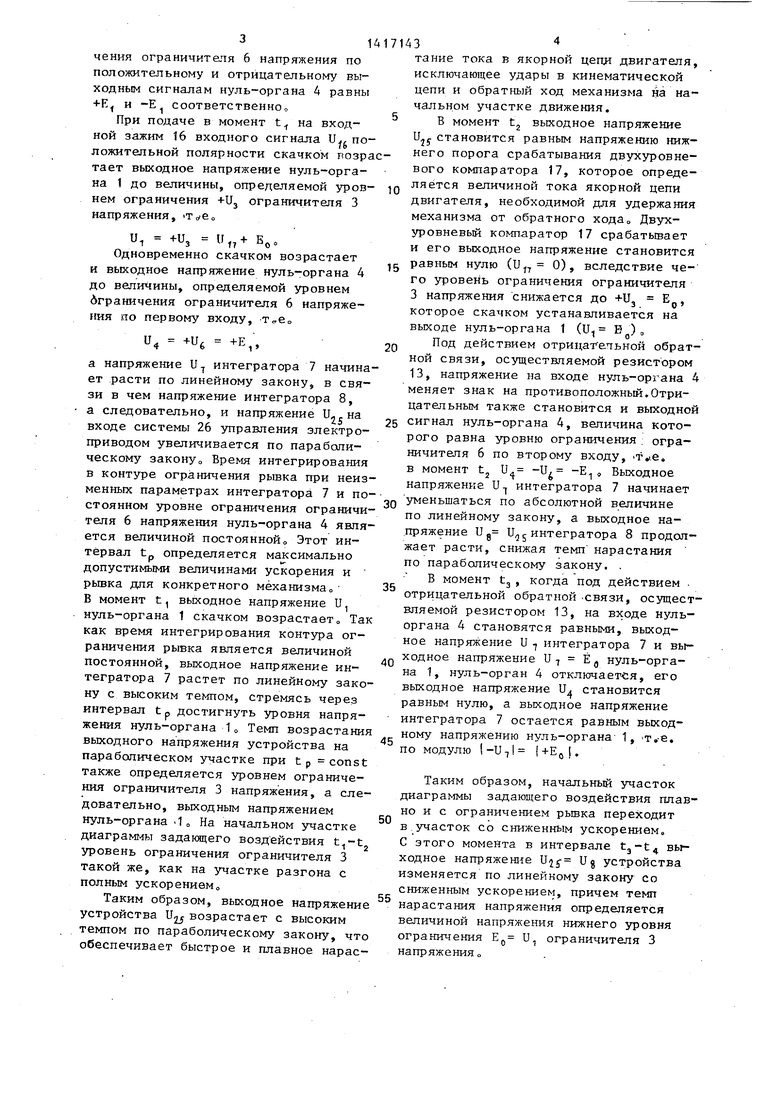
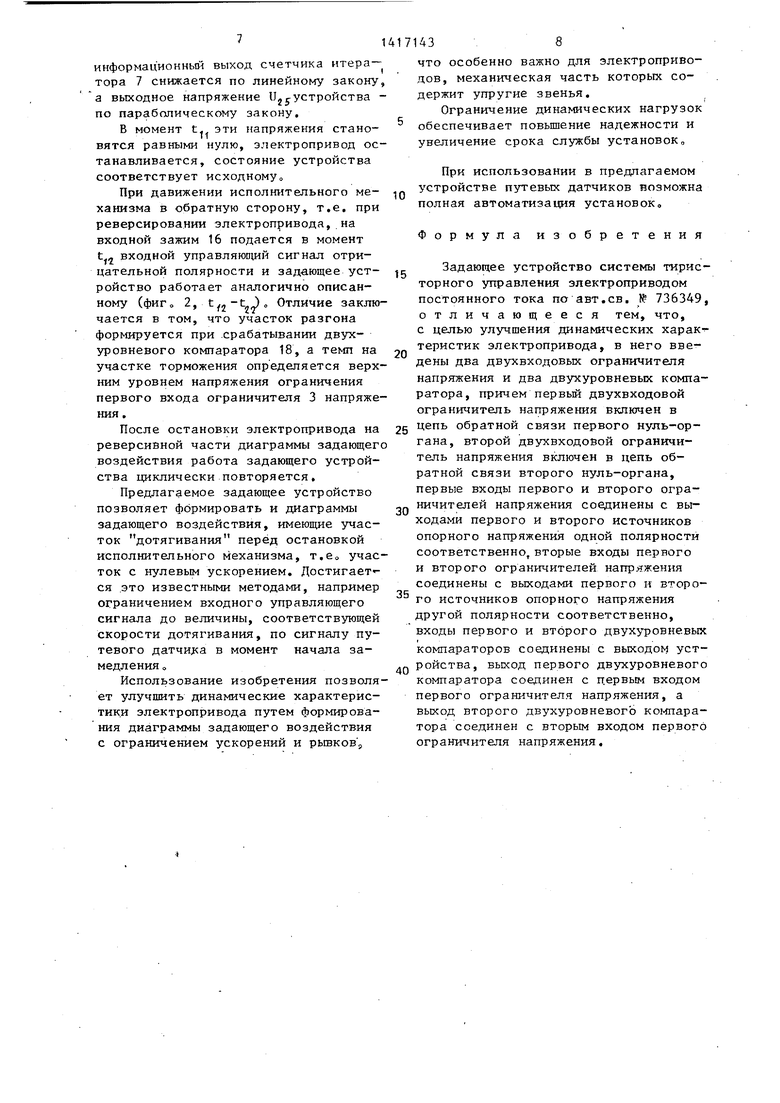
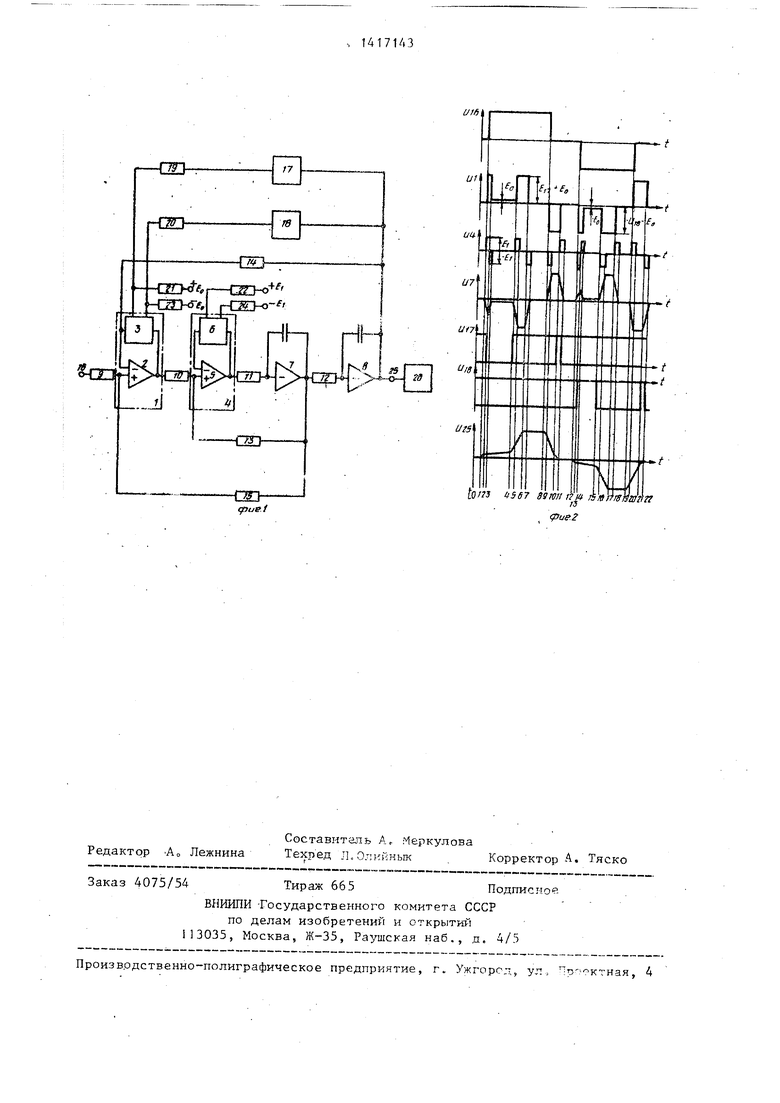
На фиг с 1 приведена функциональная схема предлагаемого задающего устройства; на фиг, 2 - эпюры напряжений, поясняюпще его работу,.
Задакдцее устройство содержит нул орган 1, состоящий из компараторов и включенного в его цепь отрицатель ной обратной связи ограничителя 3 н
пряжения, нудь-орган 4, состоящий из 20 ков опорных- напряжений определяется
аналогичным образом соединенных компаратора 5 и ограничителя 6 напряжения, и вьтолненные на операционных усилителях интеграторы 7 и В,, Нуль-органы
1 и 4 и интеграторы 7 и 8 соединены 25 жения через резисторы 21 и 22 соотмежду собой последовательно через резисторы 9-12 так, что на входе каждог
из них включен соответствующий резисторе Неинвертирующий вход нуль-органа 4 через резистор 13 соединен с выхо- дом интегратора 7, а. через резистор
10- с выходом нуль-органа 1, Нуль- орган 4, интегратор 7, резисторы 10,
11и 13 образуют внутренний подчиненный контур огра,ничения рывка системы отработки управляющего сигнала, которой и является задающее устройство, причем цепь отрицательной обратной связи внутреннего контура вьтолнена
.на резисторе 13, Инвертирующий вход нуль-органа 1 через резистор 14 соединен с выходом интегратора 8, Нуль- орган 1, интегратор 8, резисторы 9,
12и 14 вместе с внутренним конт-урок образуют вшеншний контур системы от- рЬботки управляющего сигнала, в котором цепь отрицательной обратной связи вьшолнена на резисторе 14, Не- инвертирующий вход нуль-органа 1 соединен с выходом интегратора 7 через резистор 15, который образует цепь стабилизации задающего устройства,
а через резистор 9 - с входным зажимом 16, предназначенным для подачи входного управляющего сигнала. Задающее устройство содержит также двухуровневые компараторы 17 и 18, входы которых подключены к выходу интегратора 8, являюцемуся одновременно
выходом устроиства, а их- выходы через резисторы 19 и 20 соответственно подключены к первому и второму входам регулируемого ограничителя 3 напряжения,
В качестве ограничителей 3 и 6 напряжения могут быть использованы известные устройства. Уровень ограничения напряжения и полярность ограничиваемого сигнала определяются величиной и папярностью опорньгх напряжений на входах ограничителя напряжения. Для создания неизменного во времени уровня ограничения напряжения входы ргра ничителя напряжения подключают к источникам постоянного напряжения через резисторы, сопротивлением которых и напряжением источнинапряжение на входах ограничителя напряжения. Первые входы ограничителей 3 и 6 напряжения подключены к источникам я +Е/ опорного напря
0
5
0
с
0
5
ветственно, вторые входы - к источни- кам -Eg и ,,-Е опорного напряжения через резисторы.23 и 24 соответственно.
Зажим 25 на выходе интегратора 8 служит для подачи выходного сигнала задающего устройства на вход системы 26 тиристорного управления электроприводом постоянного тока
Устройство работает следующим обраSOMo
В начальный момент времени t t, (фиг. 2) з.адающее устройство находится в исходном состоянии о При этом на входном 16 и выходном 25 зажимах напряжения равнь U О, 15 0 выходах йуль-органов 1 и 4 U , О,. и т 0; на выходах интеграторов 7 и 8 UT О, и %5 0; уровень ограничения ограничителя 3 напряжения по положительному выходному сигналу нуль-органа 1 определяется суммой входных напряжений, подаваемых на его первый вход: +Uj +U, + Ер, Уровень ограничения ограничителя 3 напряжения по отрицательног«гу выходному сигналу нуль-органа 1 определяется суммой отрицательных входных напряжений, подаваемых на его второй вход: -УЗ -UY,- Eg, где и„ ; U,g ; +Е ; -Е - напряжения на выходах двухуровневых компараторов 17 и 18 и источников опорных напряжений +Ед и -Ед соответственно фовни ограни- ,
314
чения ограничителя 6 напряжения по положительному и отрицательному выходным сигналам нуль-органа 4 равны +Е и -Е соответственноо
При подаче в момент t на входной зажим 16 входного сигнала U положительной полярности скачком розрас тает выходное напряжение нуль-органа 1 до величины, определяемой уровнем ограничения +Uj ограничителя 3 напряжения, То-ео
и, ч-Из U,,+ Б,„ Одновременно скачком возрастает и выходное напряжение нуль-органа 4 до величины, определяемой уровнем дграничения ограничителя 6 напряжения по первому входу, т,ео
4 ,
а напряжение U интегратора 7 начинает расти по линейному закону, в связи в чем напряжение интегратора 8, а следовательно, и напряжение U, на входе системы 26 управления электроприводом увеличивается по параболическому законуо Время интегрирования в контуре ограничения рывка при неизменных параметрах интегратора 7 и постоянном уровне ограничения ограничителя 6 напряжения нуль-органа 4 является величиной постоянной. Этот интервал tp определяется максимально допустимыми величинами ускорения и рьшка для конкретного механизма В момент t, выходное напряжение U, нуль-органа 1 скачком возрастает Так как время интегрирования контура ограничения рывка является величиной постоянной, выходное напряжение интегратора 7 растет по линейному закону с высоким темпом, стремясь через интервал tp достигнуть уровня напряжения нуль-органа 1 о Темп возрастания вькодного напряжения устройства на параболическом участке при t р const также определяется уровнем ограничения ограничителя 3 напряжения, а следовательно, выходным напряжением нуль-органа I На начальном участке диаграммы задающего воздействия уровень ограничения ограничителя 3 такой же, как на участке разгона с полным ускорением
Таким образом, выходное напряжение устройства Ujj возрастает с высоким темпом по параболическому закону, что обеспечивает быстрое и плавное нарас
3
тание тока в якорной цепл двигателя, исключающее удары в кинематической цепи и обратршй ход механизма на начальном участке движения.
В момент tj выходное напряжение
и., становится равным напряжению нижнего порога срабатывания двухуровневого компаратора 17, которое определяется величиной тока якорной цепи двигателя, необходимой для удержания механизма от обратного хода Двухуровневый компаратор 17 срабатывает и его выходное напряжение становится
равным нулю (V1-, 0), вследствие чего уровень ограничения ограничителя 3 напряжения снижается до +Uj Е, которое скачком устанавливается на выходе нуль-органа 1 (U В),
Под действием отридагечьной обратной связи, осуществляемой резистором 13, напряжение на входе нуль-органа 4 меняет знак на противоположный,Отрицательным также становится и выходной
сигнал нуль-органа 4, величина которого равна уровню ограничения . ограничителя 6 по второму входу, Т.I.e. в момент tj и, -и -Е, Выходное напряжение U-, интегратора 7 начинает
уменьшаться по абсолютной величине по линейному закону, а выходное напряжение и д U,jj интегратора 8 продолжает расти, снижая темп нарастания по параболическому закону. .
35
45
В момент t. , когда под действием .
отрицательной обратной -связи, осуществляемой резистором 13, на входе нуль- органа 4 становятся равными, выходное напряжение U -, интегратора 7 и вы
. ходное напряжение U Ё нуль-органа 1, нуль-орган 4 отключается, его вькодное напряжение U, становится равным нулю, а выходное напряжение
интегратора 7 остается равным выходному напряжению нуль-органа- 1, Т.-е.
по модулю -U-,l (+EQ|,
50
55
Таким образом, начальньй участок диаграммы задающего воздействия плавно и с ограничением рьшка переходит в участок со сниженным ускорением С этого момента в интервале выходное напряжеш{е 1125- Ug устройства изменяется по линейному закону со сниженным ускорением, причем темп нарастания напряжения определяется величиной напряжения нижнего уровня ограничения Е U, ограничителя 3 напряжения
В Момент t4 вькодное напряжение Ujj становится равным напряжению верхнего порога срабатывания двухуровневого компаратора 17, который определяется, например, для скиповых подъ- емных установок максимально доп усти- ; мой скоростью выхода скипа из разгру- зочных кривых в этот момент напря- 1 жения Uj , и и U4 на выходе двух- уровневого компаратора 17, первом входе огра нргчителя 3 напряжения и выходах нуль-органов 1 и 4 скачкообразно возрастают до уровней, соответствующих моменту Ь В интервале
Чty выходное напряжение U gУстройства плавно по параболической кривой достигает точки перехода в участок основного разгона с полным ускорением. Этот момент t,. определяется моментом
3
достижения равенства по абсолютной
: величине выходного напряжения U-, интегратора 7 и выходного напряжения
.и U|-7 + Е нуль-органа 1, после чего нуль-орган 4 откл1сгчается, а интегратор 8 переходит в режим интегрирования постоянного напряжения (-117 , По этой причине в интервал времени выходное напряжение Ujjустройства изменяется по линейному закону с полным ускорением, определяемым верхним уровнем напряжения ограничения БЗ Е U ограничителя 3 напряжения„
В момент t, определяемый момен,том начала перевода исполнительного механизма на установившуюся скорость движения, под действием отрицатель- . ной обратной связи внешнего контура
15 приводом выходит на установившуюся скорость движения в интервале времени
t,-t
g, т.е. на время действия входного управляющего сигнала U
В момент t.
U
когда управляющий
2Q сигнал и становится равным нулю, входной сигнал U jустройства по цепи отрицательной обратной связи через резистор 14 вызывает срабатывание нуль-органа 1, при этом выходное на25 пряжение отрицательно и равно: U -UIJ-E, так как положительный сигнал U-j поступает на инвертируюгщй вход, нуль-органа 1. Напряжение на выходе нуль-органа 4 скачком становит3Q ся отрицательным, а выходное напряжение и интегратора 7 увеличивается по линейному закону, вследствие чего выходное напряжение Ug U jинтегратора 8 снижается по параболическому закону, переводя диаграмму задающего
35
воздействия на участок замедления. В момент tg выходное напряжение и интегратора 7 достигает уровня (по абсолютной величине) выходного
системы отработки управляющего сигна- Q напряжения U нуль-органа 1, в результате чего отключается нуль-орган 4, а выходное напряжение Ug. U jинтегратор а 8 начинает снижаться по линейному закону, что продолжается в инла, осуществляемой резистором 14, выходной сигнал 11,25 устройства, поступающий на инвертирукщий вход нуль- органа 1, становится равным по величине суммарному сигналу на неинвертирующем входе этого нуль-органа Суммарный сигнал представляет собой
. тервале времени 45ч
tg t(
t, выходное напряжение
В момент
Uj устройства, поступающее через резистор 14 цепи отрицательной обратной
Uj устройства, поступающее через резистор 14 цепи отрицательной обратной
разностное напряжение на неинвертирующем входе нуль-органа 1 от воздей- связи внешнего контура на инвертиру- ствия через резистор .9 входного управ-gQ ющий вход нуль-органа 1, сравнивает- ляющего напряжения U и воздействия ся по уровню с напряжением U интегра- выходного сигнала U интегратора 7 по цепи стабилизации, осуществляемой через резистор 1 5о В момент равенства этих сигналов нуль-орган .1 отключается и его выходное напряжение становится
)5
тора 7, поступаюш 1м через резистор 15 цепи стабилизации на неинвертирующий вход этого нуль-органа, в результате чего его выходное напряжение становится равным нулю. Под действием внутренней обратной связи напряжение нуль-органа 4 скачком становится поравным нулю. Под действием внутренней обратной связи, осуществляемой резистором 13, напряжение на неинвертирующем входе и выходе нуль-органа 4 становится отрицательным, при этом выходное напряжение U -Р:. Напряжение U-, на выходе интегратора 7 начинает снижаться по абсолютной величине по линейному закону, что вызывает дальнейшее увеличение выходного сигнала Ut5 устройства по параболическому закону.
В момент t выходной сигнал U.jустройства сравнивается по величине с входным управляюпд м сигналом U.,, а исполнительньш механизм под воздействием системы 26 управления электро15 приводом выходит на установившуюся скорость движения в интервале времени
t,-t
g, т.е. на время действия входного управляющего сигнала U
В момент t.
U
когда управляющий
2Q сигнал и становится равным нулю, входной сигнал U jустройства по цепи отрицательной обратной связи через резистор 14 вызывает срабатывание нуль-органа 1, при этом выходное на25 пряжение отрицательно и равно: U -UIJ-E, так как положительный сигнал U-j поступает на инвертируюгщй вход, нуль-органа 1. Напряжение на выходе нуль-органа 4 скачком станови3Q ся отрицательным, а выходное напряжение и интегратора 7 увеличивается по линейному закону, вследствие чего выходное напряжение Ug U jинтегратора 8 снижается по параболическому закону, переводя диаграмму задающего
35
воздействия на участок замедления. В момент tg выходное напряжение и интегратора 7 достигает уровня (по абсолютной величине) выходного
. тервале времени 45ч
tg t(
t, выходное напряжение
В момент
Uj устройства, поступающее через резистор 14 цепи отрицательной обратной
связи внешнего контура на инвертиру- gQ ющий вход нуль-органа 1, сравнивает- ся по уровню с напряжением U интегра-
связи внешнего контура на инвертиру- gQ ющий вход нуль-органа 1, сравнивает- ся по уровню с напряжением U интегра-
)5
тора 7, поступаюш 1м через резистор 15 цепи стабилизации на неинвертирующий вход этого нуль-органа, в результате чего его выходное напряжение становится равным нулю. Под действием внутренней обратной связи напряжение нуль-органа 4 скачком становится пог г т- TTTt Ti SnorTi ТЭТЛ t
10
ложительным и в интервале времени t.«информационный выход счетчика итератора 7 снижается по линейноьгу закону, а выходное напряжение Ujj устройства - по параболическому закону,
В момент t, эти напряжения становятся равными нулю, электропривод останавливается, состояние устройства соответствует исходному,,
При давижении исполн 1тельного механизма в обратную сторону, т.е. при реверсировании электропривода,.на входной зажим 16 подается в момент t входной управляющий сигнал отрицательной полярности и зада.Ю1цее устройство работает аналогично описанному (фиго 2, Ло Отличие заключается в том, что участок разгона формируется при .срабатывании двухуровневого компаратора 18, а темп на участке торможения определяется верхним уровнем напряжения ограничения первого входа ограничителя 3 напряжения .
После остановки электропривода на реверсивной части диаграммы задающего воздействия работа задающего устройства циклически повторяется.
Предлагаемое задающее устройство позволяет формировать и диаграммы задающего воздействия, имеющие участок дотягивания перёд остановкой исполнительного механизма, т.е участок с нулевым ускорением, Достигает - ся .это известными методами, например ограничением входного управляющего сигнала до величины, соответствующей скорости дотягивания, по сигналу путевого датчид а в момент начала замедления о
Использование изобретения позволяет улучшить динамические характеристики электропривода путем формирования диаграммы задающего воздействия с ограничением ускорений и рьтков р
,
14171438
что особенно важно для электроприводов, механическая часть которых содержит упругие звенья.
Ограничение динамических нагрузок обеспечивает повышение надежности и увеличение срока службы установок.
При использовании в предлагаемом устройстве путевых датчиков возможна полная автоматизация установок.
Формула изобретения
5
0
Задающее устройство системы тирис- торного управления электроприводом постоянного тока по авт.ев, № 736349, отличающееся тем, что, с целью улучшения динамических харак теристик электропривода, в него введены два двухвходовых ограничителя напряжения и два двухуровневых компаратора, причем первьй двухвходовой ограничитель напряжения включен в g цепь обратной связи первого нуль-органа, второй двухвходовой ограничитель напряжения включен в цепь обратной связи второго нуль-органа, первые входы первого и второго ограничителей напряжения соединены с выходами первого и второго источников опорного напряжения одной полярности соответственно, вторые входы первого и второго ограничителей напряжения соединены с выходами первого и второго источников опорного напряжения другой полярности соответственно, входы первого и второго двухуровневых компараторов соединены с выходом устройства, выход первого двзосуровневого компаратора соединен с первым входом первого ограничителя напряжения, а выход второго двухуровневого Koi-mapa- тора соединен с вторым входом первого ограничителя напряжения.
0
5
0
t-f-orxffe,
,fr
ta3
tpue.t
fpue.Z
