Изобретение относится к машиностроению, а именно к системам управления гидравлическими прессами.
Цель изобретения - расширение тех нологических возможностей и увеличение производительности путем повышения точности ковки и снижения динамических нагрузок.
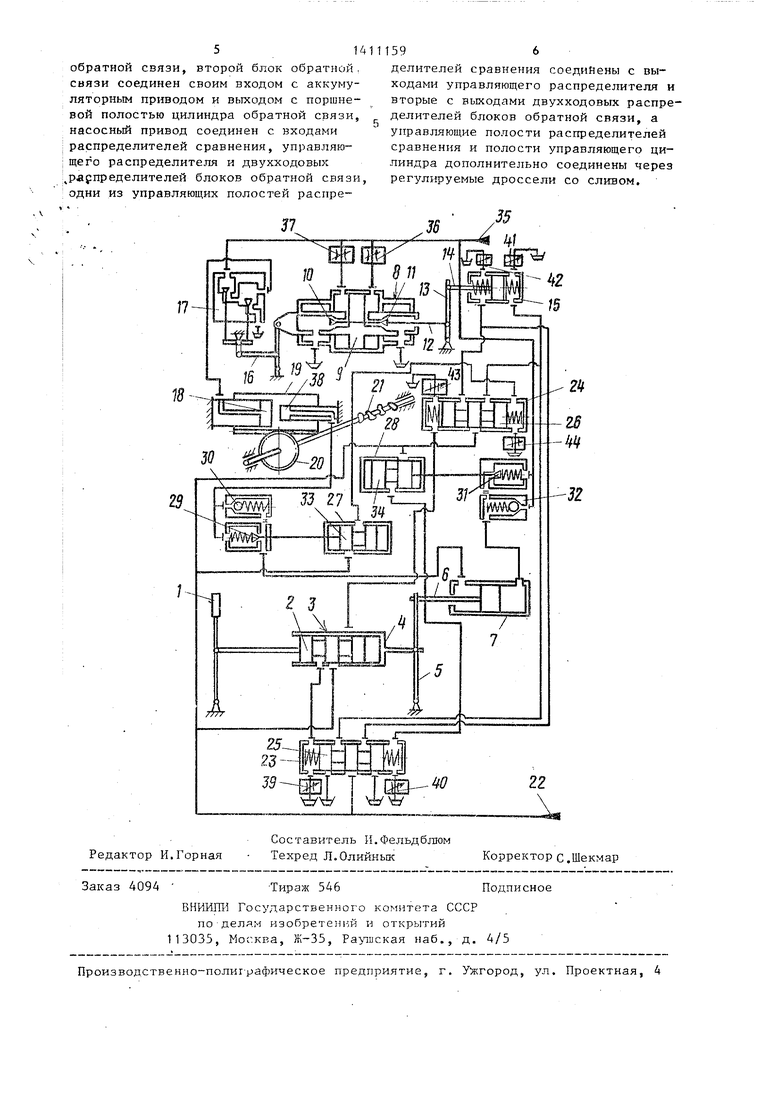
На чертеже представлена принципи- альная схема системы управления главным распределителем гидравлического jnpecca.
Система управления содержит рукоятку 1 управления, соединенную с зо- летником 2 управляющего распределителя 3, корпус 4 которого соединен ры- гчагами 5 со штоком 6 цилиндра 7 об- Iратной связи, гидроусилитель 8 в ви- |де смонтированного в циливдре двух- штокового поршня 9 с обратными клапанами 10 и 11, соединенными тягой 12 :между собой и через рычаги 13 со |штоком 14 управляющего цилиндра 15. :11оршень 9 связан одним из своих што- ков через следящую шарнирно-рьмажную |систему 16 с двухклапанным распреде- |Лителем 17, выход которого соединен ic управляющей полостью 18 гидромотора 19, связанного через реечно-шестерен ный механизм 20 с куланковым валом ;21 главного распределителя пресса (не показан). Насосный привод 22 соединен с входами распределителей 23 и 24 сравнения с подпружиненными золотниками 25 и 26, входом управляющего распределителя 3 и входами двухходовых распределителей 27 и 28 блоков обратной связи, включающих обратные клапаны 29-32. Клапаны 29 и 31 соединены тягами с золотниками 33 и 34 распределителей 27 и 28. Аккумуляторный привод 35 соединен с входами распределителя 17 и обратного клапана 32 и через дроссели 36 и 37 с полостями гидроусилителя 8.
Вход клапана 30 соединен с по- Д лостью 38 гнцромотора 19, а выход - со штоковой полостью цилиндра 7, поршневая полость которого соединена с выходом клапана 32. Выходы распределителей 23 и 24 соединены между собой и с полостями цилиндра 15, а их управляющие полости - с выходами распределителей 3,27 и 28. Управляющие полости распределителя 23, полости цилиндра 15 и распределителя 24 дополнительно соединены со сливом
5 0 о ,
„
5
0
через регулируемое дроссели 39, 40, 41, 42, 43 и 44 соответственно,
Система управления работает следующим образом.
Перемещение рукоятки 1 влево от нейтрального положения вызывает перемещение влево золотника 2, который создает давление в левой управляющей полости распределителя 24, золотник 26 перемещается вправо на величину, пропорциональную разности между текущим и заданным положениями штока гидромотора 19, и соединяет штоковую полость цилиндра 15 с насосным приводом 22, а поршневую - со сливом. Поршень цилиндра 15 перемещается вправо и через гидроусилитель 8 открывает слив- пой клапан распределителя 17, соединяя полость 18 гидромотора 19 со сливом. Шток гвдромотора 19 перемещается влево с максимальной скоростью, и при этом жидкость из привода 35 поступает через обратный клапан 32 в поршневую полость цилиндра 7, перемещая его влево, а из штоковой полости цилиндра 7 через клапан 29 жидкость поступает в полость 38 гидромотора 19; Клапан 29 выполнен с характеристикой h C Q , т.е. перемещение клапана 29 пропорционально квадрату расхода Q через него и квадрату скорости штока гидромотора 19 при движении последнего влево. Клапан 29, перемещаясь влево, смещает золотник 33, и при этом If управляющей полости распределителя 24 создается давление, пропорциональное квадрату скорости штока гидромотора 19. В лерой управляющей полости распределителя 24 создается давление, пропорциональное разности между заданным положением штока гидромотора 19, при помощи распределителя 3, корпус, 4 которого соединен со штоком 6 ципиндра 7. Во время движения давление в левой управляющей полости распределителя 24 больше давления в его правой полости, и шток гидромотора 19 движется с максимальной скоростью. Перемещаясь пропорционально перемещению штока гидрот цилиндра 19, поршень цили11дра 7 пере- мещает влево корпус 4, в результате чего уменьшается давление в левой торцовой полости распределителя 24, , и как только это давление становится ниже давления в его правой управляющей полости, начинается этап торможения штока Г1-щромотора 19 с постоянным ускорением по формуле
V 2a-Z k-Z,
где V - скорость движения штока гидромотора;
а - ускорение штока гидромотораZ - разность мелщу текущим и заданным положениями штока гидромотора,
и при торможении Штока гидромотора 19 распределитель 24 поддерживает равенство
V k-Z
где k - коэффициент пропорциональности.
Если на этапе торможения ускорение торможения штока гидромотора уменьшается, т.е.
,
давление в правой управляющей полости распределителя 24 становится больше давления в левой управляющей полости, и золотник 26 перемещается влево, изменяя перепад давления на поршне цилиндра 15, и последний перемещается влево на величину, пропорциональную
k -Z
vV
;
и через гидроусилитель прикрывает сливной клапан распределителя 17, ко торый, умен ьшив расход жидкости, сни жает, скорость движения штока гидромотора 19.
Как только осуществляется равенство ,,
v k-z ,
золотник 26 возвращается в нейтральное положение. Если на этапе торможе ния ускорение торможения штока гидро мотора 19 становится вьше оптимального, т.е.
V k Z ,
золотник 26 перемещается, вправо, соединяя с линией нагнетания штоковую полость цилиндра 15, поршень которого перемещается вправо на величину, пропорциональную . k-Z - V .
Поршень цилиндра 15, перемещаясь вправо, через гидроусилитель 8 при- открьшает сливной клапан распределителя 7, увеличивая скорость движения штока гидромотора до величины V k-Z
При перемещении рукоятки 1 вправо от нейтрсшьного положения система управления работает аналогично, но в этом случае вместо распределителей
24 и 27 и обратн1)Гх клапанов 29 и 32 в работе участвуют распределители 23 и 28 и обратные клапаны 30 и 31. Экономический эффект при внедрении достигается за счет расширения технологических возможностей и повышения производительности.
Формула изобретения
Система управления главным рас- пределителем гидравлического пресса, содержащая следящую шй рнирно-рычаж- ную систему и соединенный рычагами с двухклапанным распределителем гцдро- уси.литель в виде цилиндра с двухшто- ковым поршнем и смонтированными в последнем обратными клапанами, соединенными между собой тягой, сервомотор с двумя управляющими полостями, связанный с кулачковым валом главного распределителя и соединенный одной из управляющих полостей с выходом двухклапанного распределителя, а также рукоятку управления и аккуму- ляторньш привод, отличающа
30
35
40
45
50
55
я с я тем, что, с целью расщирения технологических возможностей и увеличения производительности путем повышения точности ковки и снижения динамических нагрузок, она снабжена цилиндрами управления и обратной связи в виде смонтированных в корпусе и образующих в них штоковые и i поршневые полости поршней со штоками, управляющим распределителем в виде установленного в корпусе золотника, двумя распределителями сравнения с подпружиненными золотниками и управляющими полостями, двумя блоками обратной связи, каждый - в виде, двух обратных клапанов и соединенного тягой с одним из них двухходового распределителя, а также шесть регулируемых дросселей и насосный привод, при этом управляющий распределитель соединен посредством рычагов своим золотником с рукояткой управления и корпусом со штоком цилиндра обратной связи, управляющий цилиндр соединен своими штоками через рычаги с тягой обратных клапанов гидроусилителя, выходы распределителей сравнения соединены между собой и с полостями уп- равлякщего цилиндра, первый блок обратной связи соединен своим входом с второй полостью сервомотора и выходом со штоковой полостью цилиндра
37
32
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Система управления гидравлическим прессом | 1982 |
|
SU1057300A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Гидравлическая система рулевого управления транспортного средства | 1981 |
|
SU977256A1 |
| Система управления главным распределителем гидравлического ковочного пресса | 1987 |
|
SU1418068A1 |
| Устройство для управления машиной с режущим рабочим органом | 1976 |
|
SU652280A1 |
| Гидропривод грузовой лебедкиСТРЕлОВОгО САМОХОдНОгО KPAHA | 1979 |
|
SU800106A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
Изобретение относится к области машиностроения, а именно к системам управления гидравлическими прессами. Цель - расширение технологических возможностей и повышение производительности. Система управления снабжена управляющим цилиндром и распределителем, связанньпш с рукояткой уп равления и цилиндром обратной связи. Последний связан с тягой гидроусилителя. Аппараты соединены между собой и с насосным приводом через распределители с управляющими полостями и блоки обратной связи. Устройство обеспечивает повышение точности ковки и Снижение динамических нагрузок. 1 ил.
7
| Система управления главным распределителем гидравлического пресса | 1978 |
|
SU673469A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
