-/J
| название | год | авторы | номер документа |
|---|---|---|---|
| Улавливатель плодов | 1982 |
|
SU1101196A1 |
| Плодоуборочная машина | 1987 |
|
SU1604226A1 |
| Плодоуборочная машина | 1979 |
|
SU990124A1 |
| Улавливатель к плодоуборочным машинам | 1973 |
|
SU506343A1 |
| Улавливатель плодоуборочной машины | 1982 |
|
SU1055399A1 |
| УЛАВЛИВАТЕЛЬ ПЛОДОВ | 1973 |
|
SU398220A1 |
| Плодоуборочная машина | 1987 |
|
SU1468462A1 |
| Машина для уборки плодов | 1985 |
|
SU1314976A1 |
| Плодоуборочная машина | 1987 |
|
SU1417823A1 |
| Рама плодоуборочной машины | 1987 |
|
SU1442122A1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - снижение потерь плодов. Улавливатель содержит поворотный скребок 5 и механизм поворота. Поворотный скребок 5 закреплен на оси 4 над верхним сектором 3. Поворотный скребок 5 и секторы 2 и 3 кинематически связаны посредством упоров. В рабочем положении скребки 5 движутся по верхним секторам 3 до упоров 12 и, воздействуя на них, поворачивают секторы 3. Поворот верхних секторов 3 ограничен упорами 13 и ограничителем 14 неподвижных нижних секторов 2. Стыковочные пластины охватывают штамб дерева, перекрывая стык между верхними секторами 3. Улавливатель находится в раскрытом состоянии и готов к работе. 2 з.п. ф-лы, 5 ил. € (Л
N:
Од 4;
gjue.
15
20
Изобретение относится к области сельского хозяйства, в частности к машинам для уборки плодов.
Цель изобретения - снижение потерь плодов.
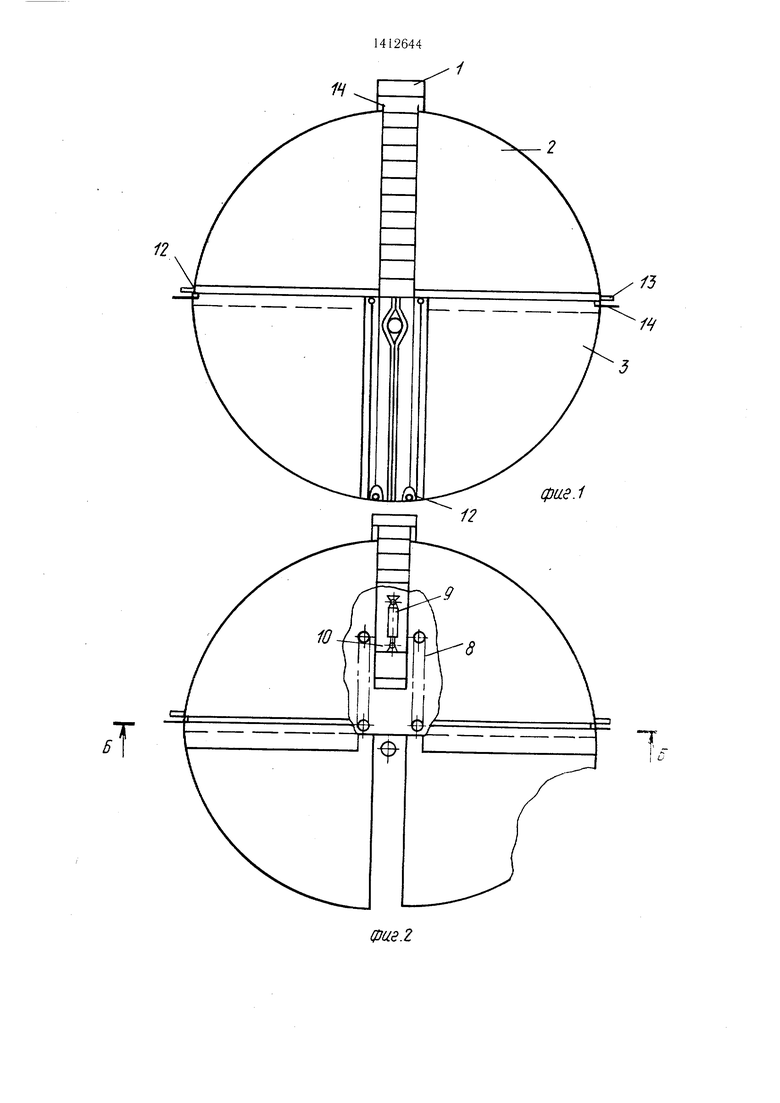
На фиг. 1 представлен предложенный улавливатель в раскрытом положении, вид сверху; на фиг. 2 - то же, в промежуточ; ном положении после сгребания плодов с
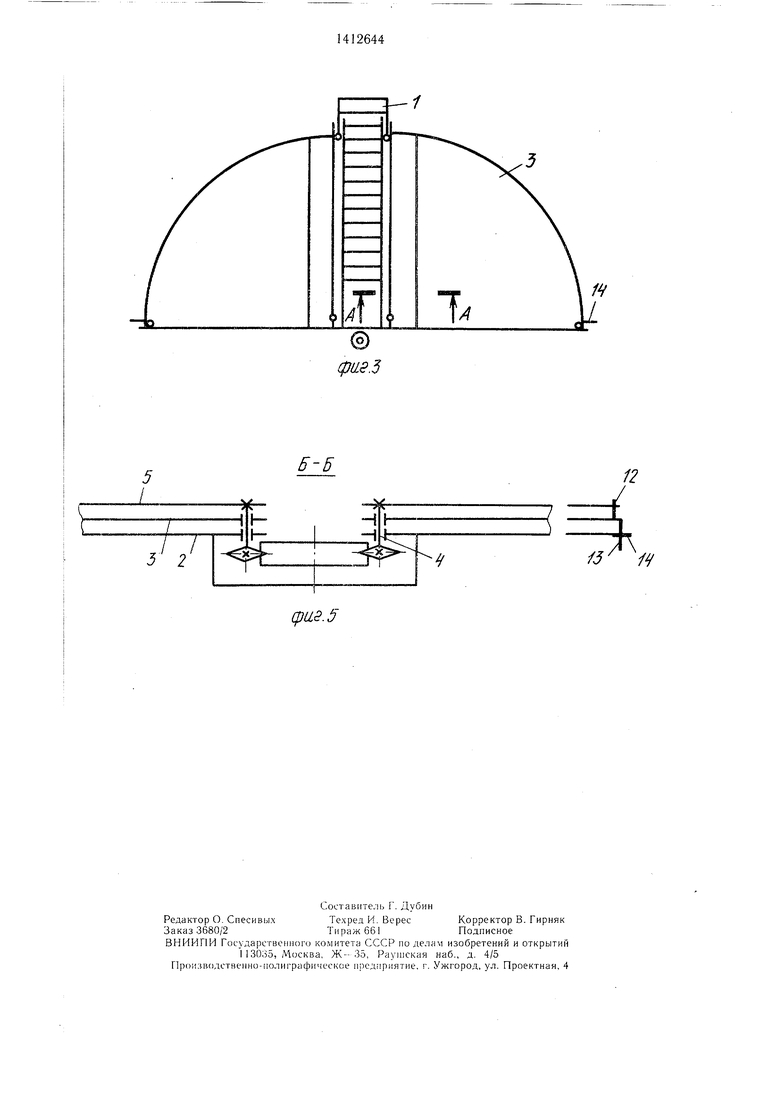
; верхнего сектора, вид сверху; на фиг. 3 - то же, в сложенном положении, вид сверху; на Ю
фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 -
I сечение Б-Б на фиг. 2.
I Улавливатель состоит из транспортера 1, нижних секторов 2, установленных с перекрытием над полотном транспортера 1 жестко и расположенных симметрично относительно продольной оси транспортера, верхних секторов 3, свободно установленных на осях 4, проходящих через нижние секторы 2. На осях 4 жестко закреплены поворотные скребки 5 с эластичными стыковочными пластинами 6 и эластичными элементами 7. Оси 4 связаны с механизмом поворота, состоящим из цепных передач 8 и гидроцилиндра 9 с ползуном 10, который соединен с цепями передачи 8. К нижним сторонам секторов 3 прикреплены эластичные 25 скребки И. На секторе 3 закреплены упоры 12, с которыми взаимодействует поворотный скребок 5, под сектором 3 закреплен пюр 13, взаимодействующий с ограничителем 14 нижнего сектора 2. Секторы покрыты амортизирующим материалом и выполнены круг овыми.
Устройство работает следующим образом. Улавливатель подводится к дереву в сложенном положении таким образом, чтобы транспортер 1 оказался против штамба дерева. При вюпочении гидроцилиндра 9 ползун 10 воздействует па цепные передачи 8 и поворачивает оси 4 с жестко закрепленными на них поворотными скребками 5. Поворотные скребки 5 движутся по верхним секторам 3 до упоров 12 и, воздействуя на 40 них, поворачивают секторы 3. При этом поворот верхних секторов 3 ограничен упорами 13 и ограничителями 14 неподвижных нижних секторов 2. Стыковочные нластины 6 плотно охватывают штамб дерева, перекры30
35
чем угол ската стыковочной пл угла естественного откоса пл ватель находится в раскрыто готов к работе.
После окончания стряхива сбор плодов, а затем склады вателя. При обратном ходе цилиндра 9 с ползуном 10 цеп поворачивает ось 4, а вмест воротный скребок 5, которы элементом 7 перемещает пло сектора 3 на нижний сектор скребок 5, дойдя до упора 1 тора 3, продолжает свое дви верхний сектор 3 по секто щая скребком 11 плоды с се этого с сектора 2 плоды попа портер 1 и подаются в тару. него сектора 3 осуществляе косновения упора 13 этого се чителем 14 сектора 2. В св секторы выполнены круговым верхнего сектора 3 полностью плодов поворотным скребком ность сектора 2 - скребком В сложенном виде улавлив транспортировке к следующе левые испытания макетного ложенного улавливателя поз потери плодов при уборке ур нению с прототипом на 5-10
Формула изобрете
вая стык между верхними секторами 3, при- транспортера с перекрытием.
5
0
5
0
0
5
чем угол ската стыковочной пластины больше угла естественного откоса плодов. Улавливатель находится в раскрытом состоянии и готов к работе.
После окончания стряхивания начинается сбор плодов, а затем складывание улавливателя. При обратном ходе поршня гидроцилиндра 9 с ползуном 10 цепная передача 8 поворачивает ось 4, а вместе с ней и поворотный скребок 5, который эластичным элементом 7 перемещает плоды с верхнего сектора 3 на нижний сектор 2. Поворотный скребок 5, дойдя до упора 12 верхнего сектора 3, продолжает свое движение и тянет верхний сектор 3 по сектору 2, перемещая скребком 11 плоды с сектора 2. После этого с сектора 2 плоды попадают на транспортер 1 и подаются в тару. Поворот верхнего сектора 3 осуществляется до соприкосновения упора 13 этого сектора с ограничителем 14 сектора 2. В связи с тем, что секторы выполнены круговыми, поверхность верхнего сектора 3 полностью очищается от плодов поворотным скребком 5, а поверхность сектора 2 - скребком 11 сектора 3. В сложенном виде улавливатель готов к транспортировке к следующему дереву. Полевые испытания макетного образца предложенного улавливателя позволили снизить потери плодов при уборке урожая по сравнению с прототипом на 5-10%.
Формула изобретения
транспортера с перекрытием.
Фиё.г
Б-Б
cpiiS.S
12
/J /
| Варламво Г | |||
| В | |||
| Машины для уборки фруктов | |||
| М.: Машиностроение, 1978, с | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| 1972 |
|
SU452313A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
