Изобретение относится к обувному : машиностроению и может быть использовано при формировании и затяжке верха обуви.
Целью изобретения является повышение качества затяжки за счет выбора оптимального закона движения затяжных пластин и его гибкой реализации.
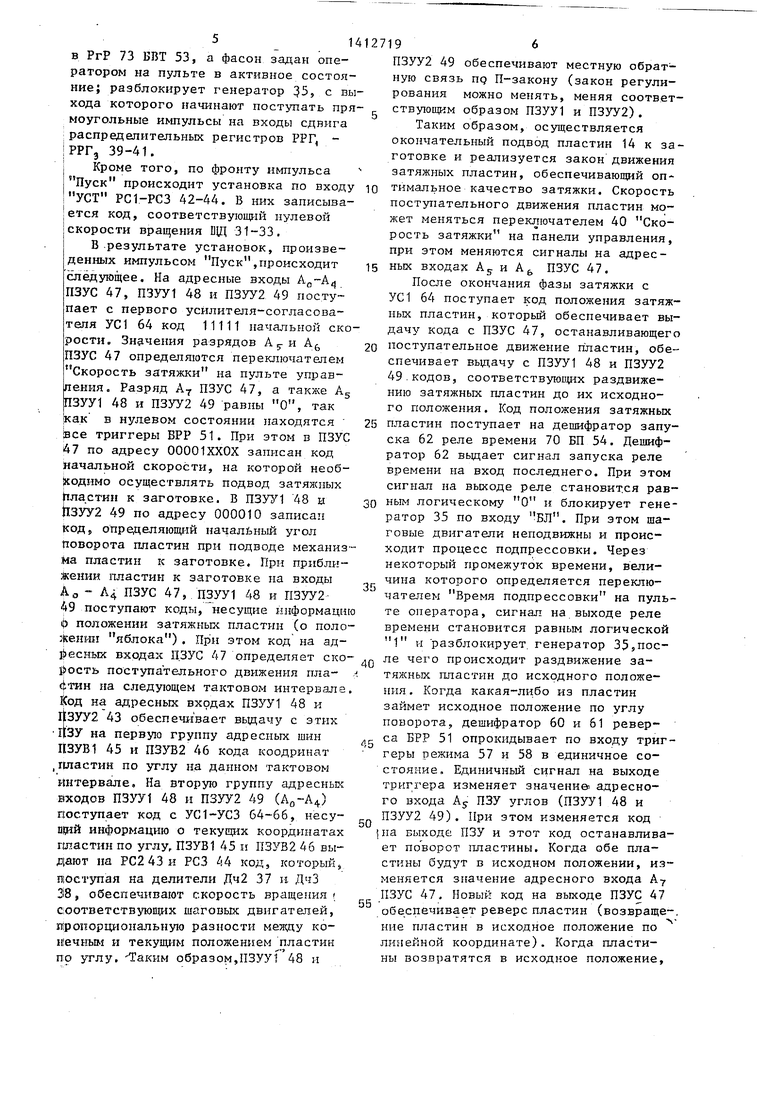
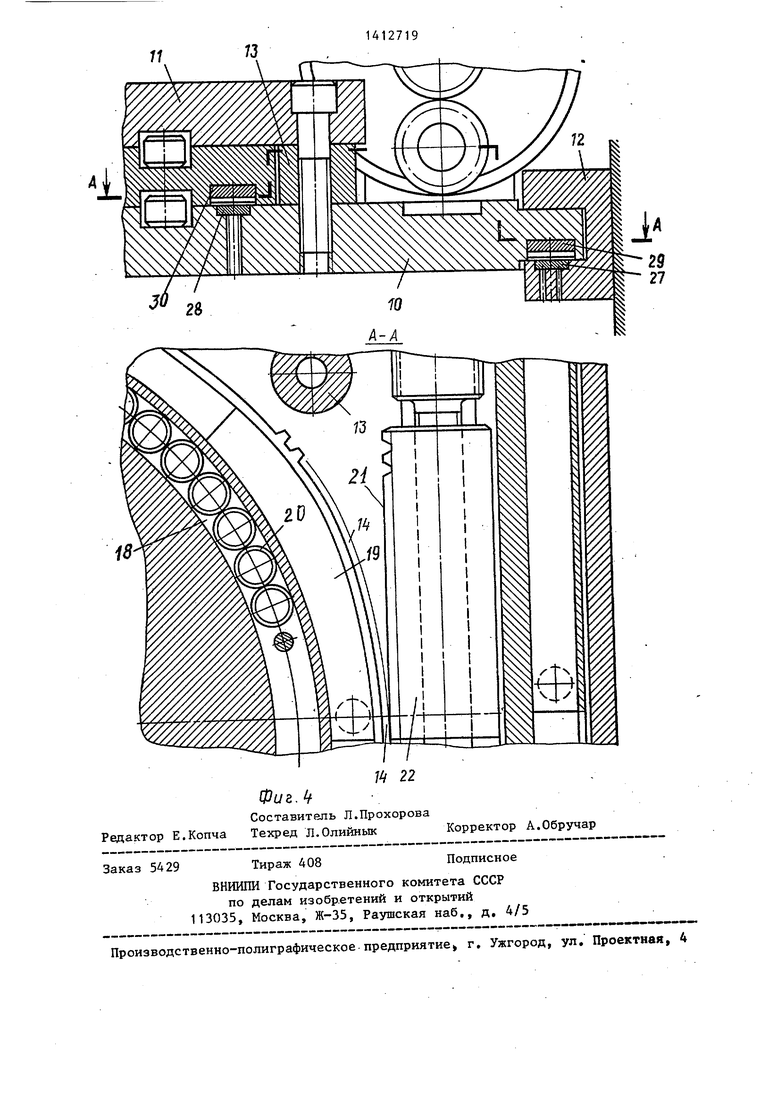
На фиг.1 приведена кинематическая схема основных сборочных единиц машины для затяжки пяточной части заготовки обуви на колодку; на фиг.2 - кинематическая схема механизма затяткных пластин; на фиг.З - схема устройства управления процессом затяжки на фиг.4 - участок механизма затяжных пластин с п разрезными датчиками. На чертежах позициями обозначены корпус 1, механизм 2 для установки колодки, механизм 3 фиксации колодки, механизм 4 пяточной (носочной) обоймы, клеенамазывающая система 5, механизм 6 подпрессовки, механизм 7 затяжных пластин, исполнительный механизм 8, обеспечивающий поступательное движение затяжных пластин, исполнительные механизмы 9, обеспечивающие вращательное движение каждой из затяжных пластин, нижняя 10 и верхняя 11 плиты, направляющие 12, распорные втулки 13, затяжные пластины 14, точка 15 сочленения (яблоко) затяжных пластин, шайба 16, хвостовик 17, круговые пазы 18 и 19, ролики 20 качения, зубчатое колесо 21, зубчатая рейка 22, гайка 23, винтовой передачи гайка - ходовой винт, ходовой винт . 24, выходной вал 25 редуктора, входной вал 26 редуктора, п-разрядный датчик 27 поступательного перемещения , п-разрядный датчик 28 вращательного движения, рейка 29 датчика поступательного движения, рейка 30 датчика вращательного движения..
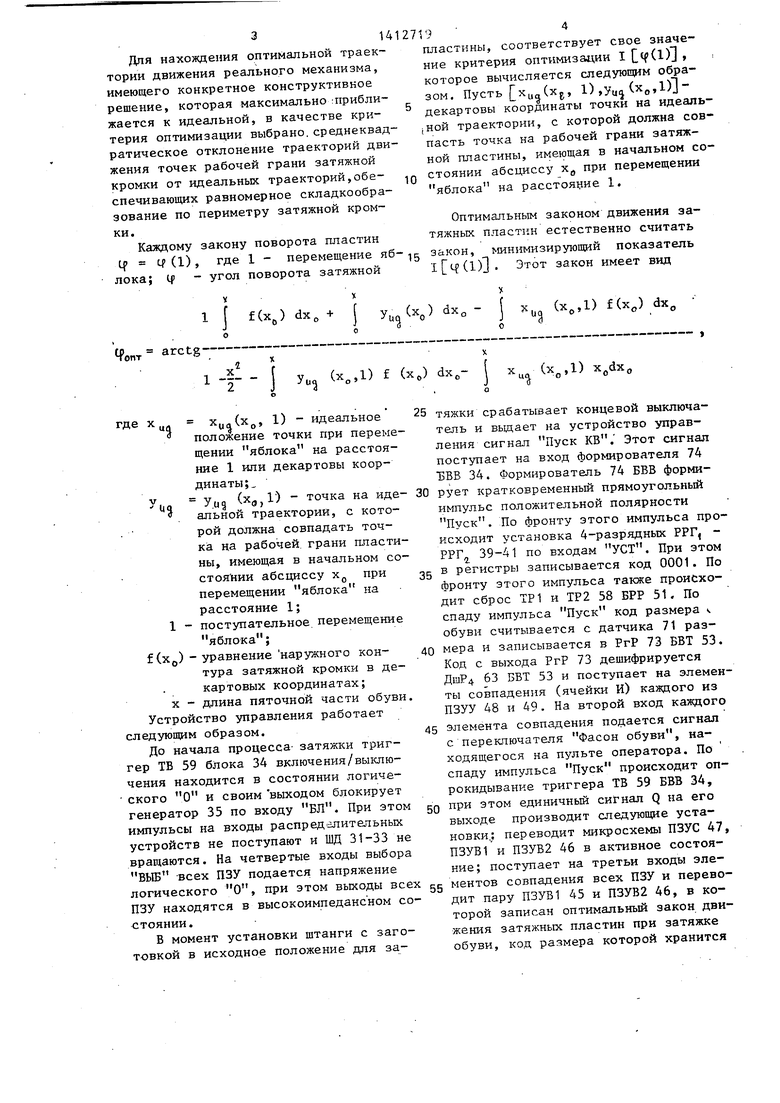
Схема устройства управления состоит из следующих блоков: трех шаговых двигателей (ПЩ1-иЩЗ) 31-33, блока 34 включения/выключения устройства управления (БВВ), генератора 35 такто- BLDC импульсов, делителей 36-38 частоты с переменным коэффициент.ом деления (Дч1-ДчЗ), распределительных регистров (РРГ,-РРГ,) 39-41, регистров 42-44 скорости (РС1-РСЗ), постоянных запоминающих устройств 45 и 46 кода координат пластин по углу, осуще
ствляющих вычитание в коде Грея (ПЗУВ1, ПЗУ.В2) , постоянного запоминающего устройства 47, задающего закон изменения скорости поступательного движения пластин (ПЗУС), постоянных запоминающих устройств 48 и 49, задающих зависимости углов поворота пластин от поступательного перемещения яблока (ПЗУУ1-ПЗУУ2),число пар этих ПЗУ
N
No N
Р
0
5
п
5
5
0
5
где
N,p - число фасонов обуви, обрабатываемых на машине;
0
NP - число размеров обуви, обрабатываемых на машине. Кроме того, устройство содержит блок 50 формирования синхросигнала (БФС), блок 51 режима работы (БРР), блок 52 скорости движения пластин, блок 53 выбора траектории (БВТ), блок 54 подпрессовки (БП), злемен- ты 55 и 56 совпадения, число которых равно числу пар ПЗУУ1 и 113УУ2 - NU, триггеры 57-59, дешифраторы (ДшР) 60-63, усипители-согласовате- ли (УС1-УСЗ) 64-66, преобразователи 67-69 Холла, реле 70 времени, датчик 71 размеров, усилитель 72, регистр 73 размеров (РгР), формирователь 74, третий элемент 75 совпадения и, четвертый элемент И 76. совпадения, четвертый делитель 77 частоты и одновибратор 78.
Принцип действия машины основан на том, что качество затяжки обуви определяется законом движения за- тяжных пластин, т.е. зависимостью угла поворота затяжных пластин от
поступательного перемещения ябло,,„
Ко. . 1
Критерием качества операции за- л яжки является размер складок затянутого материала и равномерность их распределения по длине затяжной кромки, который, математически описывается коэффициентом сжатия материала
д dl
р di;
где dl - длина элементарного участка контура затяжной кромки до затяжки;
dl - длина соответствующего участка контура затянсной кромки после затяжки.
14
Для нахождения оптимальной траектории движения реального механизма, имеющего конкретное конструктивное решение, которая максимально :прибли- жается к идеальной, в качестве критерия оптимизации выбрано.среднеквад- ратическое отклонение траекторий движения точек рабочей грани затяжной кромки от идеальных траекторий,обеспечивающих равномерное складкообразование по периметру затяжной кромки.
Каждому закону поворота пластин Ц Ч (1) , где 1 - перемещение яблока; If - угол поворота затяжной
27 V9 -
пластины, соответствует свое значение критерия оптимизации I которое вычисляется следующим образом. Пусть , 1),,1)1 декартовы координаты точки на идеаль- jHoй траектории, с которой должна совпасть точка на рабочей грани затяжной пластины, имеющая в начальном стоянии абсциссу х при перемещении яблока на расстояние 1.
Оптимальным законом движения затяжных пластин естественно считать g закон, минимизирующий показатель (l)J. Этот закон имеет вид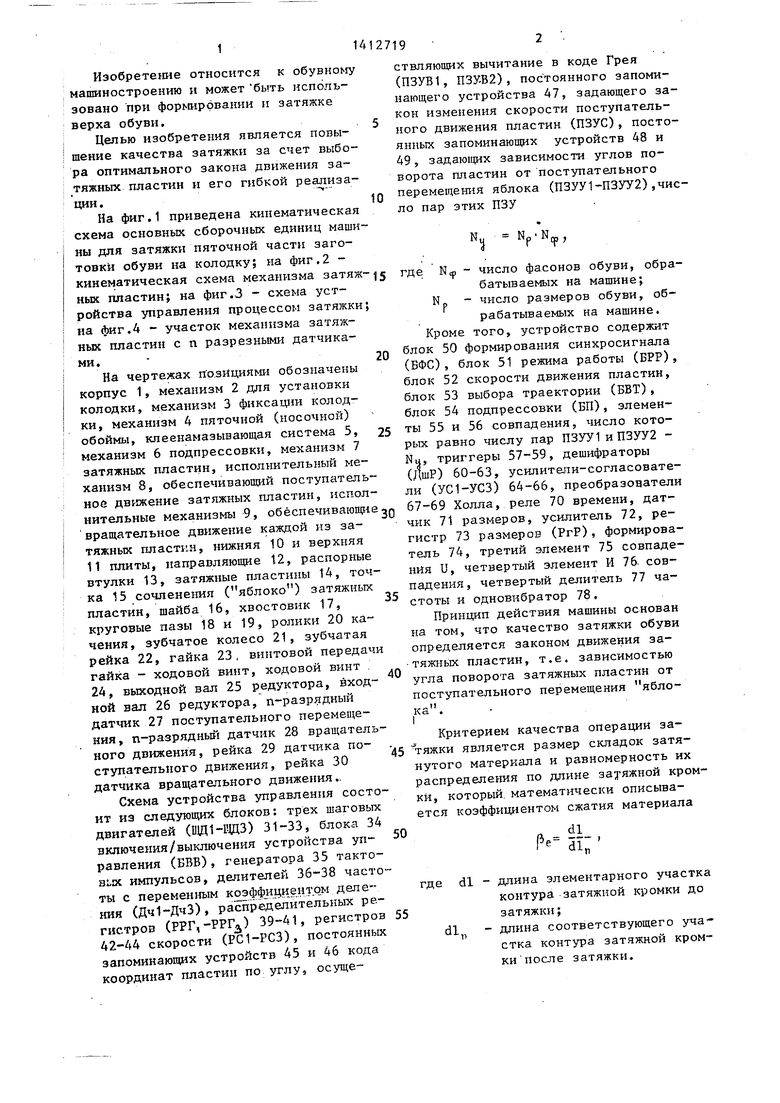

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом формования и затяжки заготовки верха обуви | 1986 |
|
SU1544354A1 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1198459A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ АСТРОИСТОЧНИКА, ПРЕИМУЩЕСТВЕННО ЗЕМЛИ И/ИЛИ СОЛНЦА | 1997 |
|
RU2131587C1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ АСТРОИСТОЧНИКА, ПРЕИМУЩЕСТВЕННО ЗЕМЛИ И/ИЛИ СОЛНЦА | 1997 |
|
RU2131586C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ СО СЛОЖНЫМ ЗАКОНОМ МОДУЛЯЦИИ | 2001 |
|
RU2293356C2 |
| Устройство для управления процессом намотки | 1986 |
|
SU1390618A1 |


Изобретение относится к обувному машиностроению и может быть использовано при формовании и .затяжке верха обуви. Целью изобретения является повьшгение степени унификации об- тяжно-затяжного оборудования и повышение -качества затяжки за счет выбора оптимального закона движения затяжных пластин и его гибкой реализации. Устройств позволяет реализовать оптимальную траекторию затяжных пластин, обеспечивающую при выполнении технологической операции равномерное распределение складок минимальной высоты по длине затяжной кромки, что создает условия для качественного выполнения последующих операций - формования следа, взъерошивания затяжной кромки, нанесения клея, и способствует прочному соединению подошвы со всей поверхностью затяжной кромки. При этом создание механизма затяжных пластин с гибкой структурой и автоматическим управлением движением затяжных пластин с об-§ ратной связью, позволяющей отслеживать оптимальные траектории в зависимости от размера и фасона обуви, дает возможность реализовать любой заданный закон движения затяжных пла-а стин и использовать предлагаемую Г конструкцию с системой управления как пяточной, так и носочной областей заготовки верха обуви на колодке.7 з.п. ф-лы, 4 ил. 4 10
tfoHT arctg Л/
1 f f(K,) dx,4- j y (x) dx, - j X (x,,l) (х„) ах„
Ьо о 3
)
, XX
X ff
1 -2 ) f (o) j x (x,l)
n
где Хцд , 1) - идеальное
положение точки при перемещении яблока на расстояние 1 или декартовы координаты;.
Уцд (Хд,) - точка на идеальной траектории, с кото- . рой должна совпадать точка на рабочей грани пластины, имеющая в начальном со стоя нии абсциссу х при перемещении яблока на расстояние 1; 1 - поступательное перемещение
яблока ;
f(Хр) - уравнение наружного контура затяжной кромки в декартовых координатах; X - длина пяточной части обуви Устройство управления работает следующим образом.
До начала процесса- затяжки триггер ТВ 59 блока 34 включения/выключения находится в состоянии логического О и своим выходом блокирует генератор 35 по входу БЛ. При этом импульсы на входы распределительных устройств не поступают и ШД 31-33 не вращаются. На четвертые входы выбора ВЫБ всех ПЗУ подается напряжение логического О, при этом выходы все ПЗУ находятся в высокоимпеданс ном состоянии.
В момент установки щтанги с заготовкой в исходное положение для затяжки срабатывает концевой выключатель и вьщает на устройство управения сигнал Пуск KB. Этот сигнал поступает на вход формирователя 74 ЗВВ 34. Формирователь 74 БВВ формирует кратковременный прямоугольный импульс положительной полярности Пуск. По фронту этого импульса происходит установка 4-разрядных РРГ, - РРГ 39-41 по входам УСТ. При этом
в регистры записывается код 0001. По фронту этого импульса также происхоит сброс ТР1 и ТР2 58 БРР 51. По спаду импульса Пуск код размера ч обуви считывается с датчика 71 размера и записывается в РгР 73 БВТ 53. Код с выхода РгР 73 дешифрируется ДшР4 63 ББТ 53 и поступает на элементы совпадения (ячейки И) каждого из ЗУУ 48 и 49. На второй вход каждого
элемента совпадения подается сигнал с переключателя Фасон обуви, находящегося на пульте оператора. По спаду импульса Пуск происходит опрокидывание триггера ТВ 59 БВВ 34,
при этом единичньш сигнал Q на его выходе производит следующие установки.; переводит микросхемы ПЗУС 47, ПЗУВ1 и ПЗУВ2 46 в активное состояние; поступает на третьи входы элементов совпадения всех ПЗУ и перевоит пару ПЗУВ1 45 и ПЗУВ2 46, в которой записан оптимальный закон движения затяжных пластин при затяжке обуви, код размера которой хранится
В РгР 73 БВТ 53, а фасон задан оператором на пульте в активное состояние; разблокирует генератор 5, с выхода которого начинают поступать прямоугольные импульсы на входы сдвига
: распределительных регистров РРГ, |рРГз 39-41.
Кроме того, по фронту импульса Пуск происходит установка по входу
РС1-РСЗ 42-44. В них записыва}ется код, соответствующий нулевой
скорости вращения 11Щ 31-33.
В .результате установок, произведенных импульсом Пуск,происходит
следующее. На адресные входы ПЗУС 47, ПЗУУ1 48 и ПЗУУ2 49 поступает с первого усилителя-согласова- теля УС1 64 код 11111 начальной скорости. Значения разрядов А j-и А ПЗУС 47 определяются переключателем Скорость затяжки на пульте управ- пения. Разряд А ПЗУС 47, а также А ПЗУУ1 48 и ПЗУУ2 49 равны О, так как в нулевом состоянии находятся все триггеры ВРР 51. При этом в ПЗУС i47 по адресу 00001ХХОХ записан код начальной скорости, на которой необ- |кодимо осуществлять подвод затяжных к заготовке. Б ПЗУУ1 48 и )13УУ2 49 по адресу 000010 записан код, определяющий начальный угол Поворота пластин при подводе механизма пластин к заготовке. При приближении пластин к заготовке на входы АО А4 ПЗУС 47, ПЗУУ1 48 и ПЗУУ2 49 поступают коды, несущие информаци | положении затяжньпс пластин (о поло :-Кенш1 яблока) . При этом код на ад- IJ)ecHbix входах ДЗУС 47 определяет ско iSocTb поступательного движения пла- 4тин на следующем тактовом интервале од на адресных входах ПЗУУ1 48 и 1|ЗУУ2 43 обеспечивает выдачу с этих
ЦЗУ на первую группу адресных шин ПЗУВ1 45 и ПЗУВ2 46 кода коодринат
, гшастин по углу на данном тактовом интервале. На вторую группу адресньк входов ПЗУУ1 48 и ПЗУУ2 49 (Ао-А4) поступает код с УС1-УСЗ G4-66, несу- информацию о текущих координатах гшастин по углу, ПЗУВ1 45 и ПЗУВ2 46 выдают па РС2 43 и РСЗ 44 код, который, поступая на делители Дч2 37 и ДчЗ 38, обеспечивают скорость вращения ( сюответствуюпщх шаговых: двигателей, иропорциональную разности между конечным и текущим положением пластин по углу. Таким образом,ПЗУУ1 48 и
ПЗУУ2 49 обеспечивают местную обратную связь nq П-закону (закон регулирования можно менять, меняя соответствующим образом ПЗУУ1 и ПЗУУ2). Таким образом, осуществляется окончательный подвод пластин 14 к заготовке и реализуется закон движения затяжных пластин, обеспечивающий оптимальное качество затяжки. Скорость поступательного движения пластин мо- лсет меняться переключателем 40 Скорость затяжки на панели управления, при этом меняются сигналы на адрес5
0
5
0
ных входах А и
Г)
0
5
AJ, ПЗУС 47.
0
5
После окончания фазы затяжки с УС1 64 поступает код положения затяжных пластин, который обеспечивает выдачу кода с ПЗУС 47, останавливающего поступательное движение пластин, обеспечивает вьщачу с ПЗУУ1 48 и ПЗУУ2 49.кодов, соответствуюцдах раздвиже- нию затяжных пластин до их исходного положения. Код положения затяжньк пластин поступает на дешифратор запуска 62 реле времени 70 БП 54. Дешифратор 62 вьщает сигнал запуска реле времени на вход последнего. При этом сигнал на выходе реле становится равным логическому О и блокирует генератор 35 по входу БЛ. При этом шаговые двигатели неподвижны и происходит процесс подпрессовки. Через некоторый промежуток времени, величина которого определяется переключателем Время подпрессовки на пульте оператора, сигнал на выходе реле времени становится равным логической 1 и разблокирует, генератор 35,после чего происходит раздвижение затяжных пластин до исходного положения. Когда какая-либо из пластин займет исходное положение по углу поворота., дешифратор 60 и 61 реверса БРР 51 опрокидывает по входу триггеры режима 57 и 58 в единичное состояние. Единичный сигнал на выходе триггера изменяет значение адресного входа Ау ПЗУ углов (ПЗУУ1 48 и ПЗУУ2 49). При этом изменяется код |па выходе ПЗУ и этот код останавливает по ворот пластины. Когда обе пластины будут в исходном положении, изменяется значение адресного входа Ау ПЗУС 47. Новый код на выходе ПЗУС 47 обеспечивает реверс пластин (возвраще-, кие пластин в исходное положение по линейной координате). Когда пластины возвратятся в исходное положение.
замыкается концевой переключатель. Сигнал с концевого переключателя опрокидывает триггер 59.блока вклю- чения/выключения ВВВ 34. Нулевой сигнал на выходе триггера 59 приво- дит в исходное состояние всю схему (отключает все ПЗУ и.генератор).
Синхронизация схемы осуществляется блоком БФС 50. На вход БФС по- ступают импульсы с генератора. Далее происходит деление частоты этих импульсов,таким образом, чтобы частота импульсов на выходе делителя частоты БФС 50 соответствовала частоте импульсов на выходе Дч1 36 при самой высокой скорости вращения первого шагового двигателя 31. Далее од- новибратор вырабатывает синхроимпульсы нужной длительности. Под действи- ем этих импульсов происходит выдача кода всеми ПЗУ и запись его в регистры скорости.
M(d)
make I (tponrCl) + Ь(1) - I ( Ч опт (D) &cf (1) M-d
d выбирается из условия
M(d) 0,1 1((,„т(1). ()
Для всех существующих размеров и фасонов обуви условие () вьшолняет ся, если d 1 мм.
Бесконтактные датчики положения затяжных пластин при поступательном и вращательном движениях представляют собой три одинаковых датчика перемещения, работающие на принципе изменения магнитного поля в зазоре между магниточувствительным датчиком, установленным на станине, и рейкой с зубцами, закрепленной на перемещаемом механизме.
При прохождении датчика под зубом магнитное пола в зазоре возрастет и датчик вьщает сигнал - логическую 1. При прохождении под впадиной магнитное поле уменьшается и датчик фиксирует сигнал логического О.
Зная величину хода механизма и точность позиционирования всей систмы в предлагаемой машине применен 6-разрядный датчик положения в коде Грея. Это дает возможность получить достаточную точность позиционироваШаг позиционирования выбирается таким образом, чтобы погрешность в реализации оптимального,закона поворота пластин cppriT l) ие приводила к ухудшению значения показателя качества I Ц1 (1) более чем на 10% относительно оптимального значения.
При щаге позиционирования d погрешность At (1) в отработке оптимального закона поворота пластин не превышает
/uif (1) I M-d
где М - максимальное значение абсолютного значения производной
М make / )/, 1 € 0,н.
Максимальное относительное отклонение критерия качества относительно оптимального равно
I (Ч-оптС))
ния и высокую достоверность получаемой информации при считьгоании.
Изменение магнитного поля в зазоре фиксируется преобразователем Хопла, далее усиливается усилителем и подается на компаратор, где форми у- ется сигнал, необходимый для дальнейшей обработки. Магнитное поле создается постоянным магнитом, установленным за преобразователем Холла на ферритовом концентраторе.
Технико экономический эффект от использования изобретения закпюча- ется в повьш1ении качества затяжки,
Устройство позволяет реализовать оптимальную траекторию затяжных плас-, тин, обеспечивающую при выполнении технологической операции равномерное распределение складок минимальной высоты по всей длине затяжной
кромки, что создает условия для качественного выполнения последующих опе- раций: формования следа, взъерощива- ния затяжной кромки, нанесения клея, и способствует прочному соединению подошвы со всей поверхностью затяжной кромки.
При этом создание механизма затяжных пластик с гибкой структурой и
автоматическим управлением движением затяжных пластин с обратной связью, позволяющей отслеживать оптималь- ные траектории в зависимости от раз- ;мера и фасона обуви, дает возможность греапизовать любой заданный закон дви- Iжения затяжных пластин и использовать данную конструкцию с системой управления как пяточной, так и носочной областей заготвоки верха обуви на колодке.
Формула изобретения
д
15
20
25
30
35
40
45
50
55
устройства изменения скорости поступательного движения пластин, первого и второго запоминающих устройств кода координат пластин по углу, первого и второго запоминающих устройств углов поворота пластин от поступательного перемещения яблока, а также содержит шифратор скорости движения пластин, блок режима работы, второй элемент совпадения И, причем вход второго усилителя согласования подключен к выходу второго преобразователя Холла, связанного с вторым исполнительным механизмом, а выход второго усилителя согласования подключен к первому входу первого запоминающего устройства кода координат пластин по углу и к первому входу блока режима работы первый выход которого подключен к второму входу первого запоминающего устройства углов поворота пластин от поступательного перемещения яблока, к второму входу блока включения-выключения и к первому входу второго элемента совпадения И, выход которого подключен к третьему входу запоминающего устройства изменения скорости поступательного движения пластин,выход шифратора скорости движения пластин подключен к второму входу запоминающего устройства изменения скорости поступательного движения пластин,вход третьего усилителя согласования через третий преобразователь Холла связан с третьим исполнительным механизмом, а выход третьего усилителя согласования соединен с первым входом второго запоминающего устройства кода координат пластин по углу и с вторым входом блока режима работы, второй выход которого подключен ic второму входу второго элемента совпадения И и к второму входу запоминающего устройства угла поворота пластин от поступательного перемещения яблока, выходы первого и второго запоминающих устройств угла поворота пластин от поступательного перемещения ябло - ка подключены к вторым входам запоминающих устройств кода координат пластин по углу, а также содержит первый, второй и третий регистры скорости, первьй, второй и третий распределительные регистры, первьй, второй и третий делители частоты, блок выбора траектории, блок формирования синхросигнала, выход которого подключен
к третьим входам первого и второго запоминающих устройств кода координат пластин по углу, к четвертому входу запоминающего устройства измет нения скорости поступательного движения пластин, к третьим входам первого и второго запоминающих устройств углов поворота пластин от поступательного пер.емещения яблока, к вторым входам всех регистров скорости, третьи входы которых подключены к второму выходу блока включения-выключения, первый вход первого регистра скорости подключен к выходу за-, поминающего устройства изменения ско ,рости поступательного движения плас- стин, выходы первого и второго запоминающих устройств кода координат пластин по углу подклйчены к первым входам второго и третьего регистров скорости, причем первые выходы первого, второго и третьего регистров скорости подключены к первым входам первого, второго и третьего распре- делительных регистров, вторые входы которых через свой делитель частоты
подключены к вторым выходам регистров скорости, выходы первого, второго, и третьего распределительных ре- гистров связаны соответственно-с первым, вторым, третьим щаговыми двигателями, вторые входы делителей частоты связаны между собой и подключены к входу блока формирования синхро- сигнала и к выходу генератора так1
товых импульсов, а первый выход Пуск блока включения-выключения связан с входами Пуск трех распре- делительньк регистров, трех регист- ров скорости, а также с входом Пуск блока выбора траектории, CS-выход -; которого подключен к четвертьм входам первого и второго запоминающих устройств угла поворота пластин от поступательного перемещения яблока, первый вход первого элемента совпадения И подключен к четвертым Q- входам запоминающего устройства изменения скорости поступательного дви- жения пластин и двух запоминающих устройств кода координат пластин по углу и к. второму входу блока выбора траектории, третий вход которхэго является входом сигнала Фасон обуви а третий вход блока включения-выключения является входом сигнала Стоп ,с пульта управления.
с распорными втулками, а между плитами размещены затяжные пластины,установленные с возможностью вращательного движения относительно шайбы с хвостовиком, один конец которого со- единен с шайбой, а другой жестко соединен с плитами, на перифериях пластин и в плитах соответственно верхней и нижней выполнены два паза в форме дуги окружности, сверху и сни13
14
зу, образующие круговые направляющие для роликов качения, по наружной части затяжных пластин выполнен сектор зубчатого колеса с возможностью вза 1}1модействия с. реечной шестерней, ко- topaH жестко соединена с гайкой вин- | овой передачи гайка - ходовой винт, онец ходового винта связан с выход- ым валом редуктора, а его входной ал связан с валом исполнительного :еханизма, например шагового двигате- ;)я, при этом на направляющих посту- г ательного движения плиты и в плите 11азмещен датчик поступательного перемещения, а в каждой из пластин и в. г:лите - датчик вращательного движения.
8, Машина п,о п.б, о т л и ч а - 4 Щ а я с я тем, что датчики посту2719
пательного перемещения и вращательного движения состоят из линейки, выполненной в виде п полос с нанесенными рифлениями, причем для датчика поступательного перемещения риф ления выполнены в виде кода Грея, над которой с зазором & где и выбирается равным л
точность позицирозания, расположена стеклотексталитовая плата, на которой расположены п преобразователей д Холла, а для датчика вращательного движения рифления выполнены на линейке в форме дуги окружности, центр которой совпадает с точкой сочленения затяжных пластин.
Ь
«tef
22
7«
Фое.
|0М первм.
L
Оацаость samfftNKU
/5
/О
Лх
Фиг:Ъ
iiCl-TI pw-J
Л7 перекя. Rpgfia поВпрксоони на пу/1ьте
1412719
| ПРОМЕЖУТОЧНАЯ ОПОРА ДЛЯ КАНАТНОГО ТРАНСПОРТЕРА | 1923 |
|
SU630A1 |
