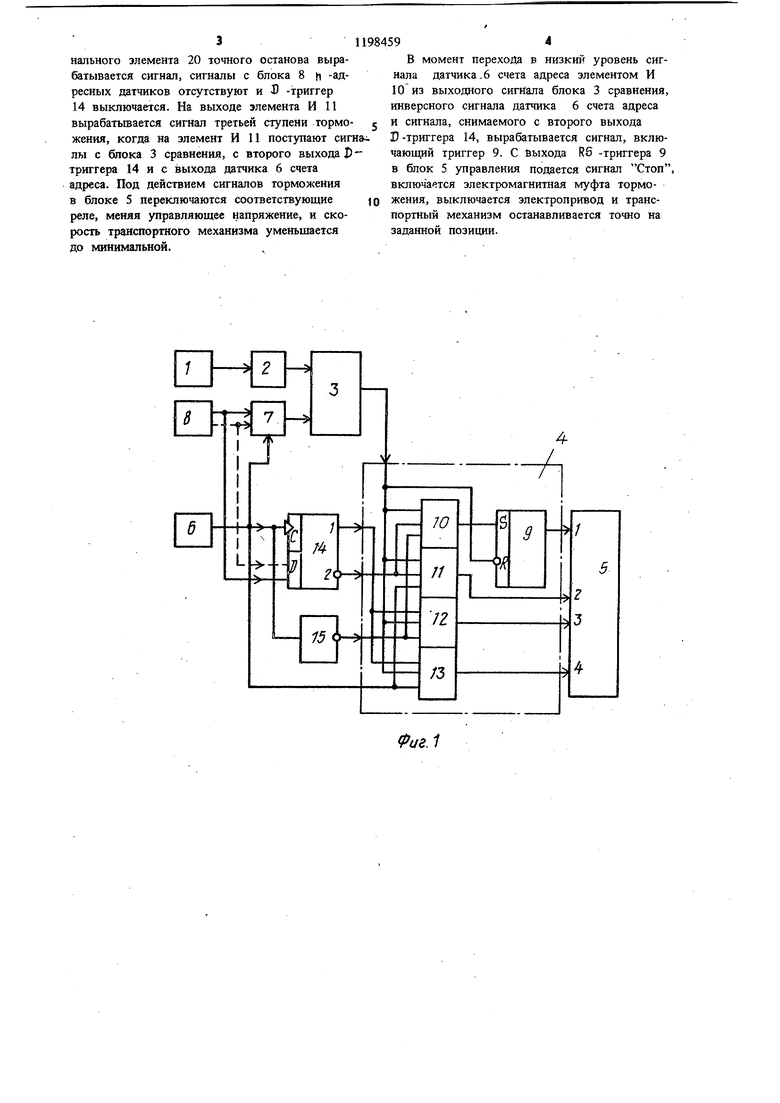
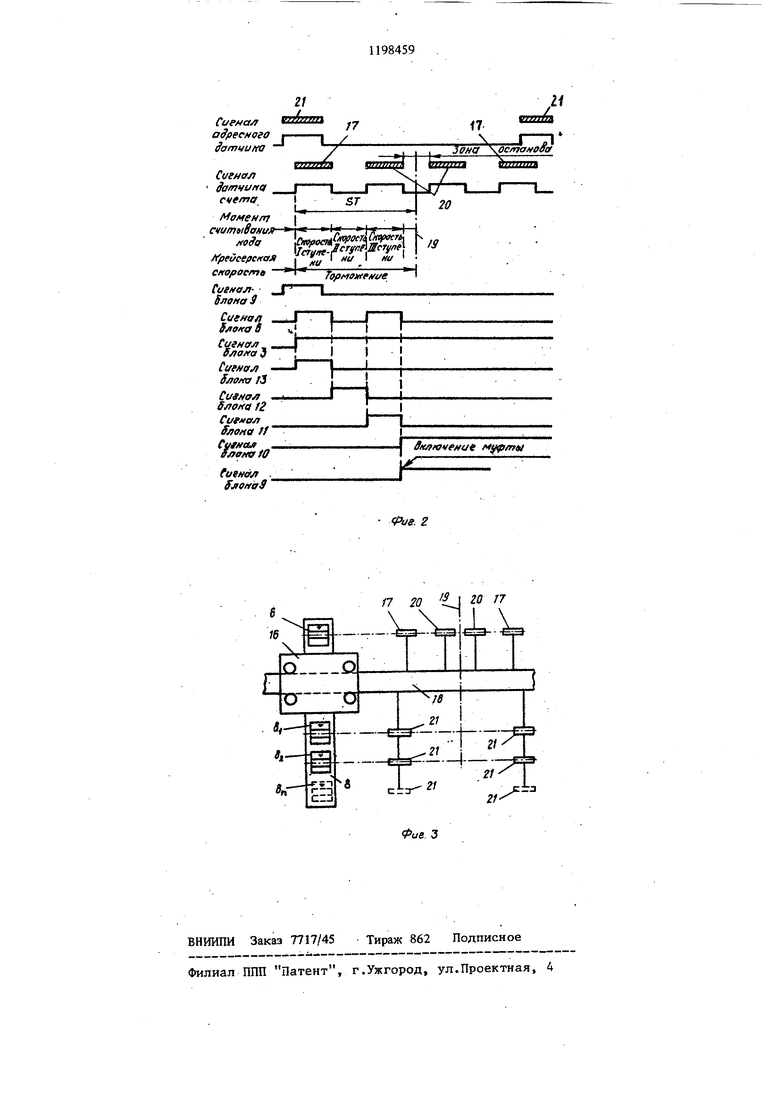
1 Изобретение относится к автоматизации производственных процессов, а HMIHHO к системам программного управления, в которых цифровое сравнивающее устройство выдает сигнал совпадения, и может быть использовано для управления механизмов внутризаводского транспорта, например, каретками для йежоперационных передач. Цель изобретения - повьшение производительности путем уменьшеййя потерь времени перемещения, упрощение устройства и повыш ние надежности его работы. С помощью блока адресных датчиков, бло ка определения местйположения и блока Зттравления скоростью движения можно . добиться режима торможения, близкого к ра нозамедленному, переключая скорость движен в определенных точках зоны торможения, в результате чего зона торможения разбивается на несколько участков (на каждом у истке задается определенная скорость .,соотнощение между которыми обеспечивает движе ние, близкое к равноземедленному), упрощае ся конструкция и повышается надежность работы устройства. На фиг. 1 изображена блок-схема устройст ва управления транспортным механизмом; на фиг. 2 - циклограмма работы устройства; на фиг. 3 - схема расположения и взаимодействия элементов устройства. Устройство управления транспортным механизмом содержит последовательно соединенные блок 1 задания программы, регистр 2 задания адреса, блок 3 сравнения, блок 4 управления скоростью движения, блок 5 управления приводом, датчик 6 счета адреса, регистр 7 текущего адреса, блок 8 адресных датчиков, а также RS -триггер , 9 и четыре элемента И 10-13, D-триггер 14 и элемент НЕ 15. На фиг. 2 и 3 обозначены транспортный механизм 16, сигнальньге элементы счета 17, направляющая 18 движения, центр 19 позиции, сигнальные элементы 20и точного останова сигнальные элементьг 21кода позиции. Устройство работает следующим образом. Из блока 1 задания программы I в регистр 2 задания адреса заносится адрес ячейки в двоичном коде и запоминается (фиг. I). Блок 3 сравнения определяет равенство или неравенство записанного адреса с адресом, записанным в регистре 7 текущего адреса. Если имеется неравенство, сигнал из блока сравнения 3 выключает JJ3 -триггер 10, по сигналу которого включается блок 5 управления приводом и транспортнь й механизм разгоняется до заданной скорости. В процессе движения транспортого механизм 16 с помощью П -адресных датчиков блока 9 8 и датчика 6 счета адреса (фиг, 1 и 3), взаимодействующих с сигнальными элементами 17, расположенными на направляющей 18 движения, в регистр 7 текущего адреса считывается текущая координата в двоичном коде. Одновременно включается D -триггер 14 пересечения позиции. Формирование и считывание кода текущего адреса происходит следующим образом (фиг. 2 и 3). Симметрично центру позиции 19 к направляющей 18 закреплены сигнальные элементы 17 счета и точного останова 20, с которыми взаимодействует в процессе движения датчик 6 счета адреса и сигнальные элементы 21 кода позиции, с которыми взаимодействуют адресные датчики блока 8. В результате взаимодействия датчиков 6 и 8 (типа КВД-6) и сигнальных элементов 17 и 21 (металлическая пластина - нож) вырабатываются сигналы. Для надежного считывания кода, исключения влияния параметров датчиков, конструкции транспортного механизма сигнальные элементы 21 кода установлены так, чтобы к моменту считывания кода, которая происходит по переднему фронту сигнала датчика счета 6, сигналы адресных датчиков блока 8 уже установились (фиг. 2 и 3). Код позиции задается сигнальными элементами 21 кода. На фиг 3 приведена позиция с двоичным кодом 11. Первый адресный датчик блока адресных датчиков 8 вырабатывает сигнал кода первого разряда, И -и датчик - сигнал кода h -го разряда. Количество адресных датчиков определяет максимально допустимое число адресов позиций (). Время считывания кода позиции (определено расстоянием (фиг. 2), которое зависит от параметров транспортного механизма 16 и допустимой скорости торможения и составляет часть расстояния между позициями. При совпадении адресов, заданного в регистре 2 и текущего в регистре 7, блок 3 сравнения вырабатывает сигнал (фиг. 2), который совместно с сигналом, снимаемым с первого выхода триггера 14, и сигналом датчика 6 счета адреса подается на элемент И 13, на выходе которого формируется сигнал торможения первой ступени. Длительность сигнала торможения зависит от длительности сигнала датчика 6 счета адреса (длительность сигнала определяется длиной сигнального элемента). Из инверсного сигнала датчика 6 счета адреса, сигнала, снимаемого с первого выхода 2 -триггера 14, и сигнала блока 3 сравнения с помощью элемента И 12 форми; руется сигнал второй ступени торможения. При взаимодействии датчика б счета и сигнального элемента 20 точного останова вырабатывается сигнал, сигналы с блока 8 h -адресных датчиков отсутствуют и В -триггер 14 выключается. На выходе элемента И 11 вырабатьтается сигнал третьей ступени торможения, когда на элемент И 11 поступают сигн лы с блока 3 сравнения, с второго выходартриггера 14 и с выхода датчика 6 счета адреса. Под действием сигналов торможения в блоке 5 переключаются соответствующие
реле, меняя управляющее напряжение, и скорость трзнспортного механизма уменьшается до минимальной.
В момент перехода в низкий уровень сигнала датчика,6 счета адреса элементом И 10 из выходного сигнала блока 3 сравнения, инверсного сигнала датчика 6 счета адреса и сигнала, снимаемого с второго выхода D -триггера 14, вырабатывается сигнал, включающий триггер 9. С Выхода RS -триггера 9 в блок 5 управления подается сигнал Стоп включается электромагнитная муфта торможения, выключается электропривод и транспортный механизм останавливается точно на заданной позиции.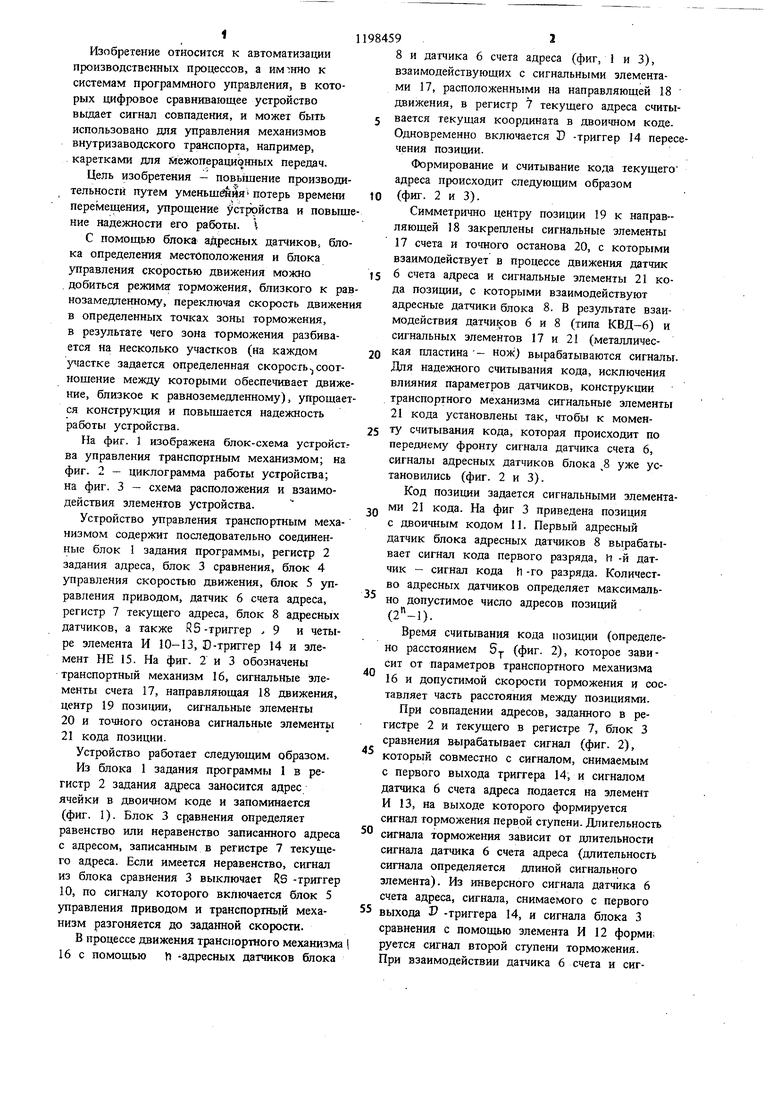
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования транспортных средств | 1986 |
|
SU1383401A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Устройство управления приводом перемещения транспортного механизма | 1988 |
|
SU1661080A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство управления приводом механизма передвижения транспортного средства для обслуживания стеллажа | 1986 |
|
SU1402520A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Устройство для отладки программ | 1983 |
|
SU1104521A1 |
УСТГОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ, содержащее первый элемент И, блок задания программы, выход которого соединен с входом регистра задания адреса, подключенного выходом к первому входу блока сравнения, выход которого соединен с первым входом второго и третьего элементов И, регистр текущего адреса, первый вход которого соединен с выходом датчика счета адреса, а выход - с вторым входом блока сравнения, R 5-триггер, выход которого подключен к первому входу блока управления приводом, отличающееся тем, что, с целью повышения производительности путем уменьшения потерь времени Перемещения, упрощения устройства и повышения надежности работы, в него введены П адресных датчиков, Р -триггер, элемент НЕ и четвертый элемент И, выход которого соединен со вторым входом блока управления, первый вход - с выходом датчика счета адреса и вторым входом элемента И, второй вход - с выходом блока сравнения и первым входом третьего элемента И, третий вход - D . с прямым выходом триггера и вторым входом третьего элемента И,, подключенного третьим входом к второму входу первого элемента И и через элемент НЕ - о к выходу датчика счета адреса и С -входу Г-триггера, третий вход первого и второго (Л элементов И соединены с инверсными выходом D -триггера, D -входы которого подключены к выходам соответствующих адресных датчиков, выход первого элемента И соединен с 5 .вхоДом R 6 -триггера, R -вход которого соединен с выходом блока сравнения, выход второго элемента И под ключен к третьему входу блока управления О) приводом, четвертый вход которого соедиJ iti нен с выходом третьего элемента И. СД СО
иг.1 чГJ
-j 8KafotefKje
f
/7 20 ll iO 7
Ч
.-ep--fepJCTТ
| Позиционная система программного управления перемещением транспортного механизма | 1972 |
|
SU447341A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для автоматического управления штабелером | 1975 |
|
SU557375A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
