-I Отмл. fg - f -/ToSgjo- -Ljigetff HtMtfUi
itne fteitoffi/f
HO
| название | год | авторы | номер документа |
|---|---|---|---|
| Подающая тележка лесопильной рамы | 1990 |
|
SU1763178A1 |
| СПОСОБ ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2005591C1 |
| Устройство управления позиционным приводом на раскряжевочных установках с продольной подачей | 1980 |
|
SU893521A1 |
| Привод механизма подачи и точного остановалЕСОМАТЕРиАлОВ | 1979 |
|
SU850375A2 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ САМОЛЕТА | 2014 |
|
RU2554050C1 |
| Устройство для подачи и точного останова лесоматериалов на раскряжевочных установках | 1987 |
|
SU1451012A1 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ САМОЛЕТА | 1994 |
|
RU2102283C1 |
| Способ раскряжевки лесоматериалов и раскряжевочная установка | 1987 |
|
SU1530444A1 |
| Способ подачи и точного останова хлыстов на раскряжовочных установках | 1980 |
|
SU905070A1 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU1046088A1 |
Изобретение относится к лесной промышленности. Цель изобретения - повьппение точности останова лесоматериалов. Устройство содержит упор 2, связанный с гидродемпфером 7. Датчики 4 перемещения, 5 скорости и 9 давле-НИН подключены к входу вычислительного блока 11. Выходы блока 11 и датчика 9 подключены к входам схемы 12 сравнения, управляющей электрогидравлическим усилителем 8. При перемещении лесоматериалом 20 упора 2 сигналы от датчиков 4,5 и 9 обрабатываются блоком 11, которьш вычисляет массу лесоматериалов и для каждой позиции вычисляет заданное ускорение торможения, при котором тормозной путь будет равен заданному. По этим величинам блок 11 формирует выходной сигнал, соответствующий заданному давлению в гидродемпфере. Следящая система, состоящая из датчика 9, схемы 12 сравне- НИН и электрогидравлического усилите- ля 8, обеспечивает регулирование давления в гидродемпфере в соответствии с заданной величиной, получаемой от блока 11. 1 з.п. ф-лы, 3 ил.
ff
Т
UctnovHUH k-- tiffffe/wmatta
Caui 8 Sffff
Изобретение относится к лесной промышленности и может быть использованр в| оборудовании для раскряжевки лесома- т ериалов. с
: Цель изобретения - повышение точ- Иости останова лесоматериалов.
На фиг.1 изображена функциональная устройства; на фиг.2 - диаграмма р;аботы устройства на участке торможе- ю на фиг.З - функциональная схема в|ычислительного блока.
Устройство включает в себя редуктор
1
входной вал которого соединен с
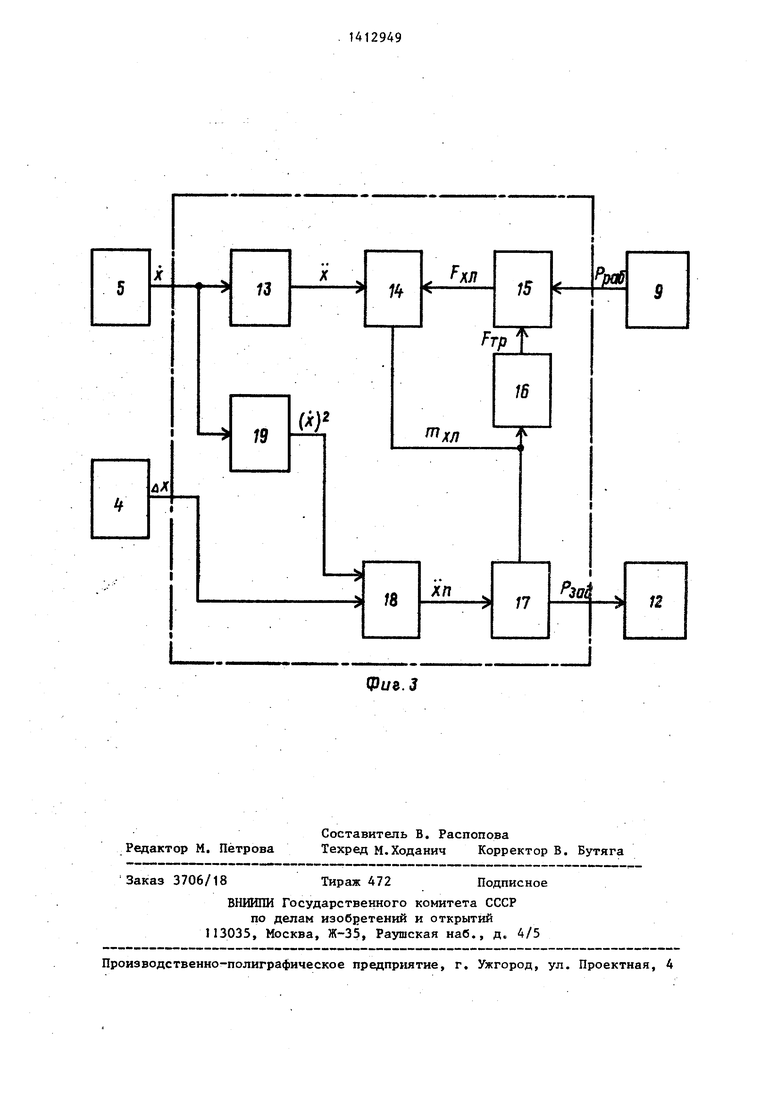
О|Сью упора 2, имеющего в вырезе лотка 31 вa положения (I - исходное положение, II - положение упора, которое со оггветствует длине отпиливаемого сортимента), и два выходных вапа редуктора с {5атчиком 4 перемещения и датчиком 5 скорости перемещения. Упор 2 шарнир- но связан со штоком 6 силового гид- ррцилиндра .(гтодродемпфера) 7, кото- рМй соединен с электрогидравличес- кйм усилителем 8, датчиком 9 давле- ния и сигнализатором 10 давления. ВыхЬдь датчиков 4,5 и 9 подключены к вЬсодам внчислительного блока 11, вы- хрд которого подключен к схеме 12 с авнечля, вторай вход которой сое- длинен также с выходом датчика 9. Вы- х од схемы 12 подключен к входу элект- р огидравлического усилителя 8, кото- р соединен с напорной и сливной магистралями гидросистег.1. Вычислительный блок 11 выполнен в виде электронного блока с тремя входа№1 и одним выходом. Вход по сигналу скорости перемещения от датчика 5 через Д1 ферен- цирукнцую цепь 13 связан с блоком 14 деления, который через сум1«фующий усилитель 13 связан также с входом вычислительного блока по рабочему дав- лению от датчика 9 давления и через блок ручной установки (усилитель) 16 коэффициента трения лесоматериала по транспортеру с выходом блика 14..
Выход вычислительного блока 11 (по заданному давлению) образован выходом блока 17 умножения, входы которого подключены к выходам блоков 14 и 18 деления. Один из входов блока 18 образует третий вход блока 11 по рассогласованию йХ от датчика 4 перемещения. Другой вход блока 18 через блок 19 возведения в квадрат связан с входом блока 11 по скорости перемеще ния. Позицией 20 обозначен обрабатываемый лесоматериал (хлыст).
5
5 0 5 0 ,.
5
Устройство работает следую1 им образом.
При подаче по лотку 3 хлыста 20 последний через упор 2, находящийся в начальном положении I, перемещает шток 6 гидродемпфера 7 и, соответственно, вращает через редуктор 1 датчики 4 и 5, которые измеряют перемещение и скорость перемещения упора. Если контакт между хлыстом и упором не нарушается в течение всего процесса останова хлыста, то показания датчиков 4 и 5 соответствуют перемещению и скорости перемещения хлыста. Ниже обосновывается, что контакт предлагаемой системой обеспечивается в течение всего процесса торможения хлыста. В начальном положении I (до начала движения упора) электрогидроусилитель 8 находится в нулевом положении, т.е. полости гидродемпфера отключены гидроусшштелем 8 от сливной и напорной магистралей. Поэтому при касании хлыстом упора в гидродемпфере 7 возрастает давление Рров , которое фиксируется датчиком 9 давления и при достижении максимально
/МС1КС
допустимого начального давления вырабатываемого в блоке 11 схемой 12 сравнения, вырабатывается сигнал на открытие электрогидроусилителя, а по показаниям сигнализатора 10 давления вырабатывается сигнал на отключение электродвигателя подающего механизма транспортера.
Регулирование по давлению осуществляется на участке А (фиг.2) на котором в вычислительном блоке 11 по информации о положении упора с хлыстом, скорости перемещения упора с хльютом и о рабочем давлении, поступающей с датчиком 4,5 и 9, определяется масса хлыста, которую необходимо затормозить к моменту, когда упор займет положение II.
В вычислительном блоке 11 решаются две з.адачи; определение массы хлыста () и расчет потребного давления. Р2дд в гидроцилиндре для торможения на участках Б и В движения упора.
Вычислительньй блок 11 работает по следующему алгоритму.
Задача 1. В блоке 14 деления по информации X от дифференцирующей цепи 13 и (инерционная сила от хлыста на упор) от cyммIipyющeгo усилителя 15 определяется масса хлыста
™ХА -
F«
тг
X
Инерционная сила, приходящаяся на упор, определяется в суммирующем усилителе 15
хл Fp«6 FTP
роб раБ Su К
vnope,
где Fpgj - сила, действующая от упора
на хлыст;
5ц - площадь гидроцилиндра; vnoPoT кинематический коэффициент
усиления упора.
Подвижные массы транспортера и его привода имеют в течение процесса торможения большую скорость перемещения, чем скорость перемещения хлыста
с упором, поэтому сила трения по транспортеру вычисляется в ке 16
FTP
тр
m
хл
где
тр
коэффициент трения хлыста по транспортеру.
В блоке 18 деления по информации X через блок 19 возведения в квадрат и по информации & X вычисляется потребное ускорение торможения, необходимое для останова хлыста на оставшемся пути л X до положения II упора
%г
Хп
х 2дХ
17 умножения оп- д д , которое и формирования
X.
45
Для сн ижения ошибок вычисления ускорения х из X путем дифференцирования можно получать X непосредственно с датчика ускорения (акселерометра), помещенного на упоре 2.
После сравнения давления в гидродемпфере РраБ с заданным давлением вырабатываемым вычислительным блоком 11, схема 12 сравнения формирует управляющий сигнал на электрогидравлический усилитель 8, который стабилизирует давление в гидродемпфере 7 относительно заданного значения Р.
зал
0
5
0
5
30
35
д
45
50
5
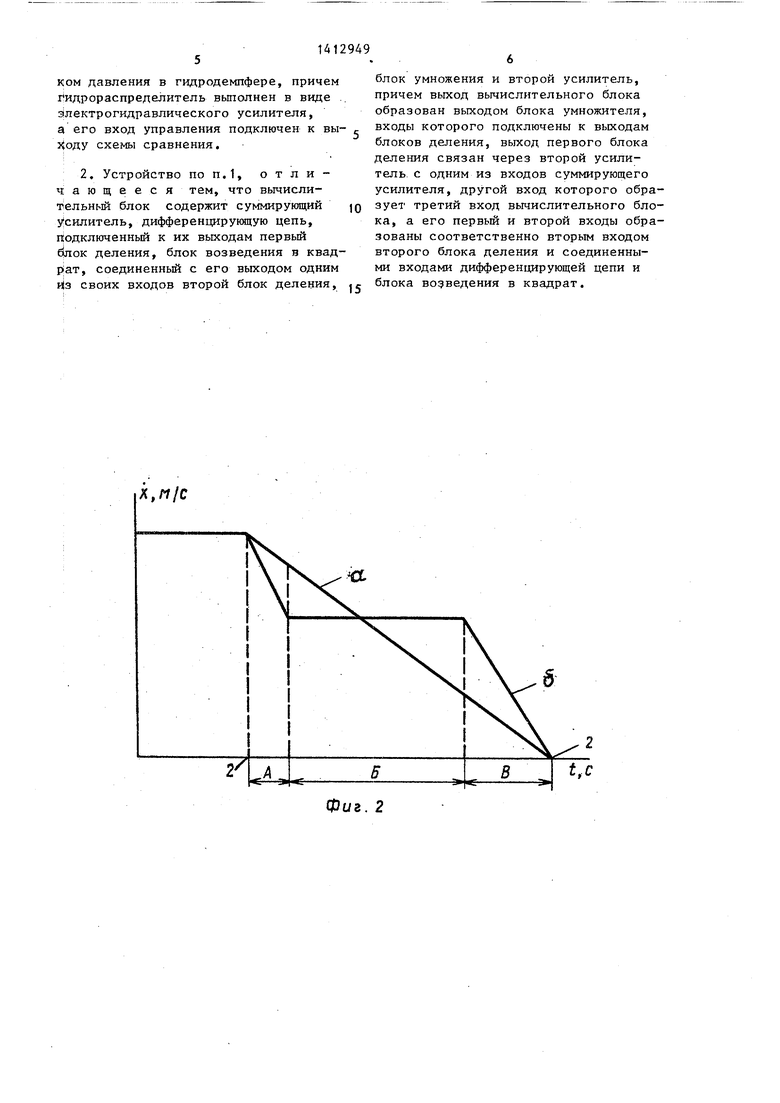
При торможении хлыста с наибольшей возможной массой давления устапав- .ливается максимальное Р, (фиг.2, график а), если же хлыст мал (фиг.2, график б), то на участке Б устанавливается равным нулю (фиг.25 график б, участок Б) до момента, когда оставшегося расстоянр я достаточно для торможения с максимальной силой Р,,,,
М01КС /, , ,,„ч
Ppng (.фиг.2, график б, участок В), На участке R (фиг.2, график б) торможение осуществляется только под действием сил трения в установке. После останова хлыста необходнмьш сортимент согласно заданной программе отпиливается, а после удаления его с лотка 3 вычислительный блок 11 через выдает сигнал на возврат упора 2 в исходное положение, блокировка подающего механизма сигнализатором 10 давления снимается, система готова к новому циклу работы.
За счет использования максимально возможного давления в гидроцилиндре в течение всего движения упора возможно осуществление встречи хлыста объемом порядка 3 м на полней скорости подачи (до 1,8 м/с). Колебательные процессы хлыста гасятся пп-гроло- полосной следящей систе.мой.
Данная система является замкнутой и в процессе торможения происходит непрерывная корректировка усилия торможения и ошибки в пути торможенрш поэтому при подходе упора к положению II удара о лоток не происходит.
Формула изобретения
Д.Л7/С
Фиг. 2
блок умножения и второй усилитель, причем выход вычислительного блока образован выходом блока умножителя, входы которого подключены к выходам блоков деления, выход первого блока деления связан через второй усилитель с одним из входов суммирующего усилителя, другой вход которого образует третий вход вычислительного блока, а его первый и второй входы образованы соответственно вторым входом второго блока деления и соединенными входами дифференцирующей цепи и блока возведения в квадрат.
Фиг.З
| УСТРОЙСТВО для ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ | 0 |
|
SU363582A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Приемный стол для отмера длин сортиментов при раскряжеровке хлыстов | 1974 |
|
SU504639A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
