tera
,JB4
Os.
Д.
iKjoCnc Tc lu e относится, к ант омач ii- ке, а nMt iiiK) к ycTptiiicTBaN снн- xp(i -i T:iaii, и ф;;-чнр( ира цаю1; ихся ofi i-.cK i cii, и может быть иг.пользовано в системах автоматн ;ескогч) упранле- ния судовых энергетических устанои.к д.гги синхронизации греблык налов,,
He.ui-.io и н)бр( является повышение точ}к}сти и устойчр ности, а 1 акже paciinipeniie сбласти применения системы путем обеспечсн --|я рсгулнрор,ани рассогласования фазовых углов при синфазном вра1цении объектов.
На чертеже приведена структурная электрическ я схема сисггемы, где п - заданич- ск:)рости вращения, Д|. - задание рассогласования фазопо х углов с
Система -содержит: обт)екть 1, 2 управлен1- Я (гребные валы), регуляторы 3; 4 частоты вращения . соответствующих валов, датчики 5,, 6 положения вращающихся oOiiexTOB (отметчики фазы)5 триггер 7, переключатель 8 н:апр а мления интег рирования; первый иктех ратор 9, устройство 10 выборки м храпения, второй интегратор 1 , уст-- ройство 12 выборки и хранения (УВХ) ,, суммирующий ус-ялитель 13, компаратор 14, сумматор 15.
Система работает следующим образ ом ,
При враще)ии объектов 1 , 2 датчи-- хами 5, 6 формируются последователь-- ности импульсов, одиозн;;чно соответ -ствующих частоте и фазе зращения каж
дого объекта. Цепь системы, обеспе-- чивающая синфазное вра1;1,ение объектов с заданной частотой и с заданной разностью фазовых углов, работает следующим образом. При попадании им-- . пульса от датчика 5 (начало цик.ла) на триггер 7 последний переводится в состояние О, что ягишется управляющим воздействием для срабатывания переключателя 8 направления интегр1г- рован-ия в сторону нарастапия выходного сигнала ии.тегратора 9. В начале цикла при попадании импульса от да/гчика 5 сбрасывается в нуль интегра-- тор 9, а в УВХ 10 записывается значение выходного сигнала интегратор: в конце предьщ ацего цикла. Импульс компаратора 14 формируется в обеспечения зa aнпoгэ рассогласова-- кия фазовых углов йс и подается на триггер 7 после поступления в эту импульса от 6 с запа . i:.n 0
5
liaHI-iCM, П1 оГ,х, ,-,;;. „ ,.; :; ч -;;. - - ..: знда}пкз1 О 1;;;с; ;. vji;ir , :;а н ля . .; ;; от датчик,) о 11:.г,ы-,, . т I-(. ;,; ;-;;: пм.л .пьса от Кч;:-п;а - - . ря -: i. .п сер /, С ПрПХСЛОМ И.-ШуЛ ,.:: ; ; КОМnc iaiopa 14 Tpni гер 7 ;,ч. л-свас с J сек: тс;я1;пс i и с iiohnni ;,о пс:рсх, :ч)- ча 1;ел51 8 меняь:г гк ппаилсиле пс/егри-- рования на с- бра снис Л с---г(- Г ::п у iib,Xi.-jr- Л(л о сиглала iiii i t rpaTcrj;- 9,. У Kcinu: п,икла по сигпаиу да :--;ика S зс ч:1ое :эначсние иыходиси С еи najia nirrc- са- TOiia 9 затстсыиается п УВХ И: л :о-- дастся черс:} су - матср 1 ) i-.п ;Г:-;.::л рС1 улятора ч. раз-;.-/ -п лаз нраи;ения объс :Т1:;в 1 f -c срс.:/ i ic/c: рИрОВаПИЯ в ПСЯМС М я :;Ора М: : -: гСМГС; Л-;
лении о,:П1лакс;.1О и гис; )илходН(П о : игнала ин1С1 ратоол paiin; nyjijo,- llp:;i на:п; 1ИИ фа Г р :; с: o sC Tca - мня (или cneps. жепия) Л -.п лсься lansn-i ратор:) 14 от значения : 8( ,oiit.-;нс)С значение иыходпо:) с сссгпп иитсграто ра 9 будет положат. Гц,ньи- (ил) ; 1ЛЭИ пательным) i-; Л5И1е;-с;а г ар;- ся1Ц;-:: ; ст величины ото. с огсга;;а:л1Я (.или cnic- режекия) 5 чте:- привсд;,- к 1К;я .;леьик) И выхода УЗХ 10 noao/;n- TCj;bHC44J (.или отрицательного) cnincjTa, }. действующего на рег улктот) :л сгопол сиижепия (пли уве.;:илз1;пя) частоты вращения (зб ьекта /с Тзкик , с;). система поддерживает ,:азное и,ли., при соответствунлцей ус raiiciBKC /датчиков 5 и 6, С :нфазпое :3pamcH i-:; объектов, причеь ири ;:оз:мсжлос 11- регулирования с з стапания H-i:;y:ib :a компаратора 14 от .) л. 6 обеспечивается зозмс:чснос ь ста лов .и л.юбо1 о значения расс о; iacon:iuHX фазовых угло; П Э ciiiaiia мг:- la |Л-;; : -объекте 3,Цепь с:исто - :Ы; .;С С1П:ч;;м -:;ррекцию регулировали; сии.:/. объектов V. зависи:чос 1 И ::т м . лас:тот;.1 вращения и L)6ecncaH:a:i )i.: :1я .;ад:1лное рассогласонзпие фазовь;х ::С,-оп, рабг-i- тает слс:1ум::.1им оораз;л-:,
Peryjn-ipyas:(t C: 1зоздсйс7 315с , -л,.ступающее на |ЧЛ, :- Я-л;и 4 -. б ;-е:-:-:-а л.. nponofMU-iCHaabiic зс ;-г-,; :: :лс г: ic in: j pCMf iiHbiX C , :c-3voi e,Kjiv :i:i.,;Cnn:
1С- Т1УЛЬСОВ 0-Г Да : ;:И чОЗ (7 :i -,) и
(6 и на триг -ер 1 . м:;-л-.. upi-: уве:Н1 -сппи частоты ;з,-ап:г ..:.- :- -:.с:-; ч;: 3 2 раза нпсмя с -s):-ieH a .;;- : ;а- я ,i:-n:y л от д,ат лс а : л- :- .IM ;: -; .л :i ЛИЯ v- - V- bC:i : :-- :ч;: с ; - такукс нреми с ,омента попа;таиия импу.гтьса от д-ятчика 6 до MOJ ieiiTa попадания шпульса от датчика 6 сок р а т ит с в 2 раза, С л е л о в а т е л ь н о ., в 2 раза сокращается разность зтнх времен, а значит, н {jery лир уюте е зоздействие на блок А также yr-ieF b-- шится S 2 раза, 3 данном примере изменение регулирующего воздействия на peryjTHTop А не связано с изменен. ем угла рассогласования фаз объектов. Для учета влияния изменения частоты вращения объектов на регу-- лирующее воздействие формируется сигнал, пропорциональный частоте вращения объектов, и подается на вход интегратора 9 через переключатель 8 направления интегрировай ия; Таким образом,угол наклона характеристики выходного сигнала интегратора 9 пропорционален частоте вращения объектов и компенсирует влилние изменения частоты вращения объектов на регулирующее воздействие на регулятор 4,
Сигнал, пропорциональный частоте вращения объектов, формируется следующим образом.
Последовательность импульсов датчика 6 периодически заносит в УВХ 12 значение сигнала интегратора 11 предыдущего цикла и обнуляет интегратор для нового интегрирования в сторону выходного сигнала. Выходной сигнал с УВХ 12 попадает на инвертирующий вход усилителя 13; причем на не- 1нвертиругоп1ий вход подается постоян- ньм с 7гнал, С выхода усилителя 13 разностный подается на интеграторы
и
1, Пусть частота вращения ооъектов изменилась например, уменьшаласье При этом увеличивается время (ду импульсами датчика 6, а значит 5 увеличивается время интегрирования интегратора 11, следователь но5 увеличивается величина выходного сигнала.интегратора 11 в конце цикла. Этот сигнал через УВХ 1 2 подается в усилитель 13,Поскольку этот сигнал подается на инвертирз. юший вход усилителя 13J а на выход поступает разностный сигнал, то чем больше выходной сигнал интегратора 11; тем меньще выходной сигнэ-Л усилителя 13j т.е. обеспечивается пропорциональное изменению частоты вращения обт ектов изменение выходного си1 нала усилителя 13. С вь ходоБ уси 1П еля 13 сигнал подается на вход интеграторов 9 и 11, и если
.5
0
5
0
0
5
0
5
cK pi CTb нра ения ofnA -ixTciri умепьинг- лась, то ссгтветственно уменьшается -. ГОЛ наклон;; .хзр;з ктеристик выхолных с: р. интегратор о к .
05ecne4etiriO тал.анного рассогласования фаз( углов объектов, е, регулиргт;лние пс. 1Ичин1-1 рязно - га сОъектот относит.-льно друг друга езавигимо от частоты вра1це)пш, сч:у- цествляется за счет регулируемой по времени задержки попадания импульса от датчика Ь на триггер 7. Из описания цепи регулирования синфазного вращения объектов следует, что регулирующее возде 1ств1 е, поступающее на регулятор А объекта 2, подаваемое через сумматор 15 с. УВХ 10, зависит от разности времени интегрирования интегратора 9 в сторону нарастания и в сторону убывания выходного сигнала а переключатель 8 направления интегрирования гтриводится в действие триггером 7j который срабатывает при попадании на него импульсов от датчиков 5 и 6; для регулирования величины рассогласования фазовых углов обеспечивается регулирование времени задержки попадан1ьч на триггер 7 импульса одного из датчиков (5 или 6) относительно Ьмпульсов другого. Это реализовано следующим образом. При вращении объектов импульс датчика 6 попадает на уг:равляющи11 вход интегратора 115 в результате чего последний обнуляется и начинает интегрирование в сторону нарастания выходного сигнала. Возрастающий выходной сигнал интегратора 11 поступает на компаратор 14, причем на другой вход компаратора 14 поступает сигнал задания д с р . При достижении выходным сигналом интегратора 11 величины заданного сигнала , компаратор 14 подает импульс на триггер 7, в результате чего триггер 7 переключается в положение 1, что приводит к изменению направления интегрирования интегратора 9 и к дальнейшей работе цепи обеспечения синфазного вращения. Таким образом, величина сигнала зад.антм лср, поступающего на компаратор 14, пропорциональна времени задержки попадания импульса на триггер 7 и, меняя эту - величину 5 можно регулировать время задержки, а значит, и- величину рассогласования фазовых углов объектов ,
Ф о р м у JT а и 3 о б р е т с }, и я
(Л1стема фазсюой синхронияацик гфаа),акл1п-гхся объектоя, содержащая нос .педопатсльно соединенные первый ре г у ля тер частоты вращения, вход кот о- рпг-о соединен с входом за,ца}шя ско-- рости вращения системы, первьш объек .пеиия и первый датчик положения последовательно соединенные второй регулятор частоты вращенияj второй объект управления и второй датчик Г оложе11 1я и триггер, о т л и ч а ю- а..а я с я тем, что, с целью повьш е-- ния точностин устойчивости, а также расширения области применения системы,, в нее дог1ол;- ительно введ,ены первый и второй интеграторы, первое и второе устройства выборки и хранения, усилитель переключатель, компаратор и сумматор первый вход которогс соединен с входом задания скорости вращения системы, выход сумматора соединен с входом второго регулятора частоты вращения,, второй вход :;yм 1aтopa соединен с выходом первого устройства выборки и кране- rii-m J иВлЬормадионньп вход которог О подх.пю - ен к выходу первого интег
5
0
ратора, подключенного первым и в го- рым информадионн|,1ми входами соответ- С венно к первому и второму выходам переключателя, информадионный вход которого соединен с выходом суммирующего усилителя и информационным входом второго интегратора, подключенного выходом к первому входу компаратора и к информационному входу второго устройства выборки и хранения, выход которого подключен к первому входу суммирующего усилителя, второй вход которого является входом задания постоянного сигнала системы, второй вход компаратора подключен к входу задания рассогласования фазовых углов систем я, выхолт компаратора соединен с входом установки триггера, подключенного выходом к управляющему входу переключателя, а входом - к управляющему первого устройства выборки и хранения; к входу сброса первот о интегратора и к выходу первого датчика положения, выход второго датчика положения соединен с входом сброса второго интегратора и управлягацим г входом второго устройства выборки и хранения
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| Регулятор реактивной мощности | 1989 |
|
SU1697068A1 |
| Широтно-импульсный модулятор | 1989 |
|
SU1644370A1 |
| Влагомер-двухполюсник | 1988 |
|
SU1548736A2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ И ИСКЛЮЧЕНИЯ СМЕЩЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ В ПРИЕМНИКЕ С КВАДРАТУРНОЙ ДЕМОДУЛЯЦИЕЙ | 1995 |
|
RU2241304C2 |
| Способ возбуждения газового лазера и устройство для его осуществления | 1990 |
|
SU1785058A1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2473866C1 |
| Устройство для фазовой синхронизации в системах передачи данных | 1980 |
|
SU926783A2 |
Изобретение относится к автоматике, а именно к устройствам для синхронизации и фазировк вращающихся объектов, и может быть использовано в системах автоматического управления судовых энергетических установок для синхронизации гребных валов Целью изобретения является повьпиеиие точности и устойчивости системы, а также расширение области ее применения. Система содержит объекты уирав- ;ления 1, 2, регуляторы 3, 4 частоты вращения, датчики 5, 6 положения, триггер 7, переключатель 8, интеграторы 9, 11, устройства 10, 1 2 выборки и хранения, усилитель 13, компаратор 14, сумматор 15. Регулирующее воздействие в системе, с целью обеспечения синфазного вращения, корректируется прикаяэдом обороте объектов в зависимости от частоты вращения объектом, а величина этого воздействия пропорциональна рассогласованию фазовых углов объектов, т.е. в системе обеспечивается плавное и непрерывное регулирование. В системе предусмотрено та1.:же регулирование величины рассогласования фазовых углов вращающихся объектов, 1 ил. i-. S / ; k-f f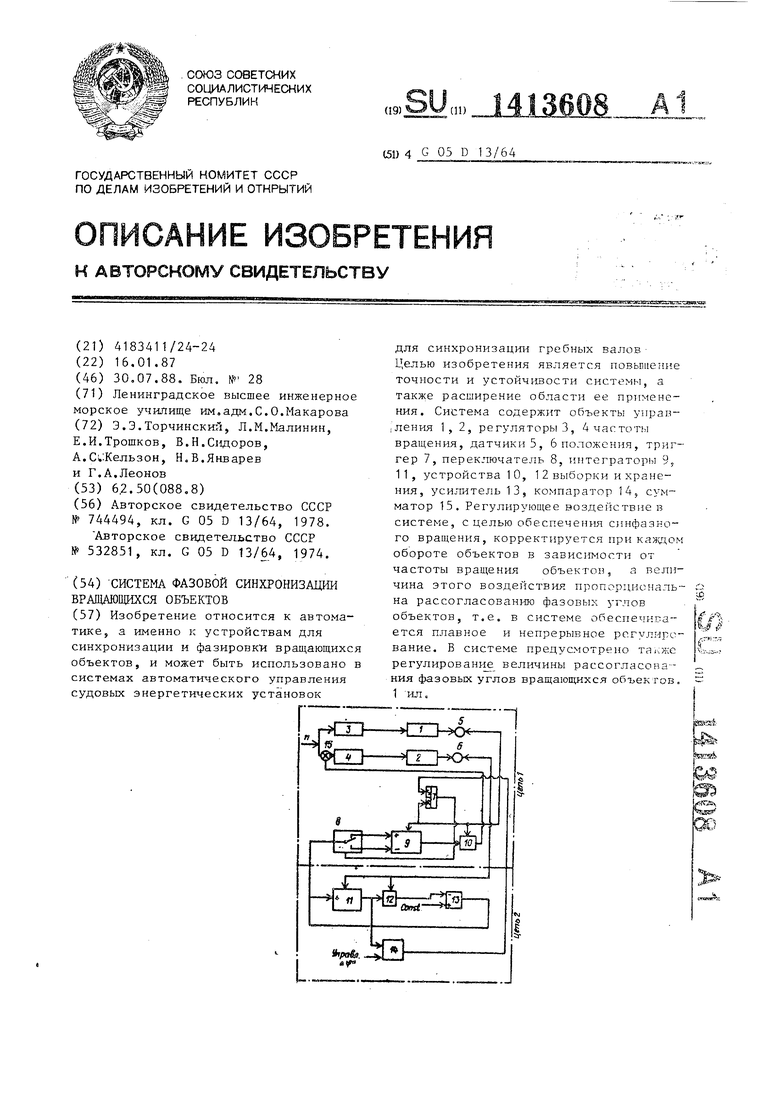
Составитель Е„ Власов Редактор М. Циткина Техред И. Верес Корректор С. Черни
Заказ 3785/51
Тираж 866
ВИИИПИ Государстненного комитета СССР
по делам изобрете}-;ий и открытий 113035, Москва., Ж-35, Раушская наб,., д. 4/5
Производственно-полиграфическое прег;г|ркятие , г,, Ужгород, ул, Г1роект1;ая, 4
Подписное
| Устройство для фазовой синхронизации вибровозбудителей | 1978 |
|
SU744494A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система синхронизации вращающихся объектов | 1974 |
|
SU532851A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
