(Л
С 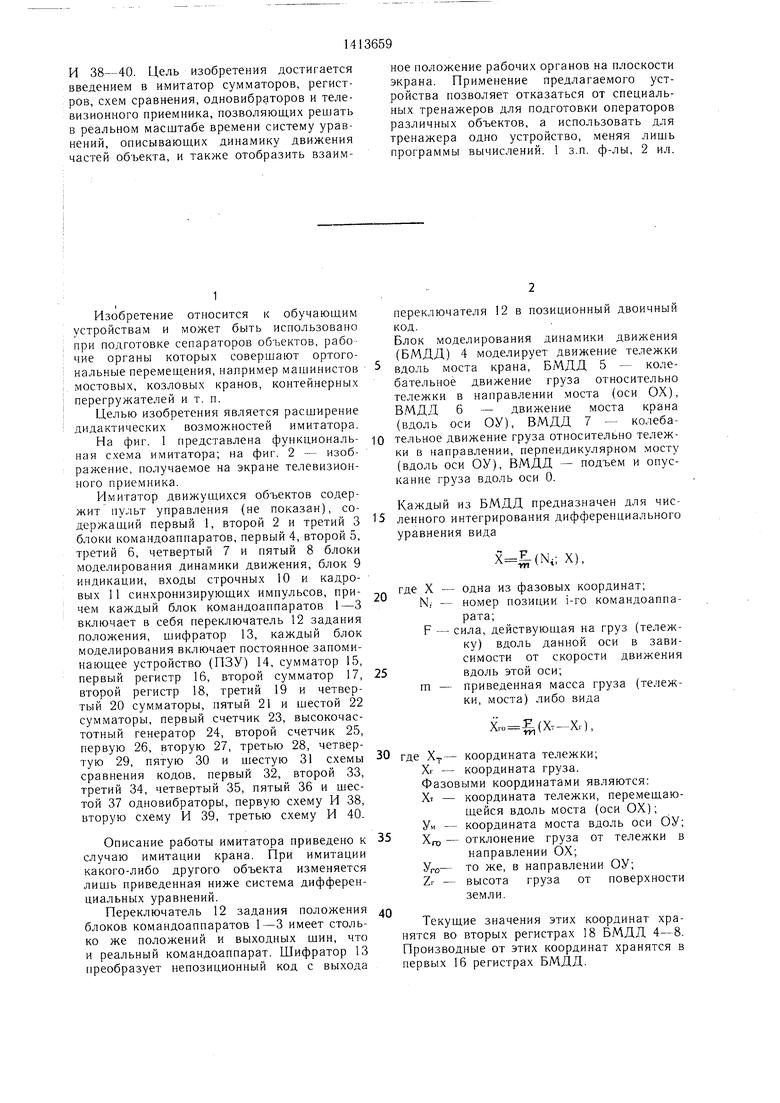
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор визуальной обстановки тренажера крановщика | 1988 |
|
SU1569866A1 |
| Тренажер крановщика | 1983 |
|
SU1108484A1 |
| Устройство для распознавания прямого края объекта | 1988 |
|
SU1587552A1 |
| Тренажер водителя транспортного средства | 1986 |
|
SU1328837A1 |
| Способ измерения координат центра тяжести изображения и устройство для его осуществления | 1990 |
|
SU1806445A3 |
| Устройство для вывода графической информации | 1986 |
|
SU1399809A1 |
| Устройство для отображения информации на экране телевизионного приемника | 1985 |
|
SU1277177A1 |
| Телевизионный цветосинтезатор | 1985 |
|
SU1284006A1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| Тренажер водителя погрузчика | 1984 |
|
SU1163344A1 |
Изобретение относится к обучающим устройствам и может найти применение при подготовке операторов динамических объектов, например портальных кранов, контейнерных перегружателей, погрузчиков и других перегрузочных машин. Целью изобретении является расширение дидактических возмож ностей путем придания имитатору универсальных свойств, позволяюш,их имитироЕ ать реальную обстановку применительно к различным по технологическим процесса.м объектам. Имитатор содержит первый I, второй 2, третий 3 блоки командоаппаратон. первый 4, второй 5, третий 6, четвертый 7 и пятый 8 блоки моделирования дипамики движения, блок 9 индикации, первый, второй, третий и четвертый сумматоры, генератор 24, первый 23 и второй 25 счетчики, шесть блоков сравнения 2() 31, шесть одновибраторов 32-37, три э.чемента
со О5 ел
со
И 38-40. Цель изобретения достигается введением в имитатор сумматоров, регистров, схем сравнения, одновибраторов и телевизионного нриемника, позволяющих решать в реальном масштабе времени систему уравнений, описывающих динамику движения частей объекта, и также отобразить взаим1
(
Изобретение относится к обучающим устройствам и может быть использовано при подготовке сепараторов объектов, рабо чие органы которых совершают ортогональные перемещения, например машинистов мостовых, козловых кранов, контейнерных перегружателей и т. п.
Целью изобретения является расширение дидактических возможностей имитатора.
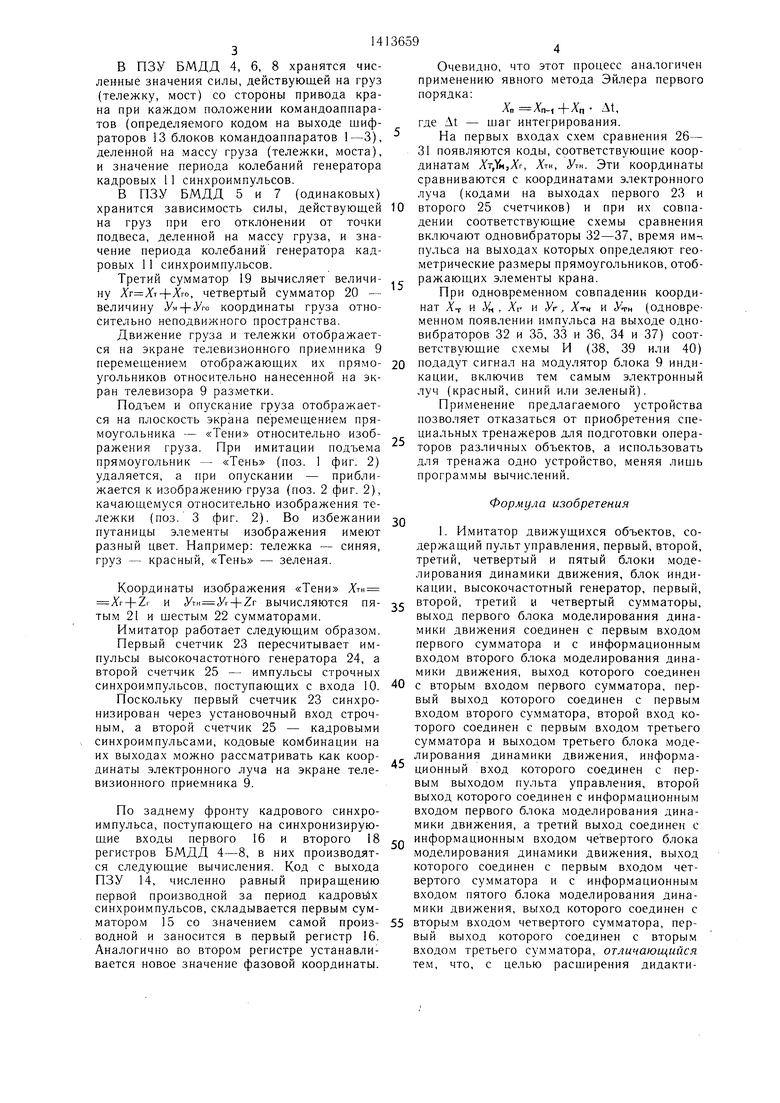
На фиг. 1 представлена функциональная схема имитатора; на фиг. 2 - изображение, получаемое на экране телевизионного приемника.
Имитатор движущихся объектов содержит пульт управления (не показан), содержащий первый 1, второй 2 и третий 3 блоки командоаппаратов, первый 4, второй 5, третий 6, четвертый 7 и пятый 8 блоки моделирования динамики движения, блок 9 индикации, входы строчных 10 и кадровых 11 синхронизирующих импульсов, причем каждый блок командоаппаратов 1-3 включает в себя переключатель 12 задания положения, шифратор 13, каждый блок моделирования включает постоянное запоминающее устройство (ПЗУ) 14, сумматор 15, первый регистр 16, второй сумматор 17, второй регистр 18, третий 19 и четвертый 20 сумматоры, пятый 21 и шестой 22 сумматоры, первый счетчик 23, высокочастотный генератор 24, второй счетчик 25, первую 26, вторую 27, третью 28, четвертую 29, пятую 30 и шестую 31 схемы сравнения кодов, первый 32, второй 33, третий 34, четвертый 35, пятый 36 и шестой 37 одновибраторы, первую схему И 38, вторую схему И 39, третью схему И 40.
Описание работы имитатора приведено к случаю имитации крана. При имитации какого-либо другого объекта изменяется лишь приведенная ниже система дифференциальных уравнений.
Переключатель 12 задания положения блоков командоаппаратов 1-3 имеет столько же положений и выходных шин, что и реальный командоаппарат. Шифратор 13 феобразует непозиционный код с выхода
ное положение рабочих органов на плоскости экрана. Применение предлагаемого устройства позволяет отказаться от специальных тренажеров для подготовки операторов различных объектов, а использовать для тренажера одно устройство, меняя лишь программы вычислений. 1 з.п. ф-лы, 2 ил.
переключателя 12 в позиционный двоичный
код.
Блок моделирования динамики движения
(БМДД) 4 моделирует движение тележки
вдоль моста крана, БМДД 5 - колебательное движение груза относительно тележки в направлении моста (оси ОХ), ВМДД 6 - движение моста крана (вдоль оси ОУ), ВМДД 7 - колебательное движение груза относительно тележки в направлении, перпендикулярном .мосту (вдоль оси ОУ), ВМДД - подъем и опускание груза вдоль оси 0.
Каждый из БМДД предназначен для чис- ленного интегрирования дифференциального уравнения вида
X(N,; X),
где X - одна из фазовых координат;
N, - номер позиции i-ro командоаппа- рата;
F - сила, действующая на груз (тележку) вдоль данной оси в зависимости от скорости движения вдоль этой оси;
m - приведенная масса груза (тележки, моста) либо вида
Х,.„(,),
где X-J,- координата тележки; Хг - координата груза. Фазовыми координатами являются: XT - координата тележки, перемещающейся вдоль моста (оси ОХ); УИ - координата моста вдоль оси ОУ; Хго - отклонение груза от тележки в
направлении ОХ; УГО- то же, в направлении ОУ; Zr - высота груза от поверхности земли.
Текущие значения этих координат хранятся во вторых регистрах 18 БМДД 4-8. Производные от этих координат хранятся в первых 16 регистрах БМДД.
В ПЗУ БМДД 4, б, 8 хранятся численные значения силы, действующей на груз (тележку, мост) со стороны привода крана при каждом положении командоаппара- тов (определяемого кодом на выходе шифраторов 13 блоков командоаппаратов 1-3), деленной на массу груза (тележки, моста), и значение периода колебаний генератора кадровых И синхроимпульсов.
В ПЗУ БМДД 5 и 7 (одинаковых) хранится зависимость силы, действующей на груз при его отклонении от точки подвеса, деленной на массу груза, и значение периода колебаний генератора кадровых 11 синхроимпульсов.
Третий сумматор 19 вычисляет величину , четвертый сумматор 20 - величину Ум-|-Уго координаты груза относительно неподвижного пространства.
Движение груза и тележки отображается на экране телевизионного приемника 9 перемещением отображающих их прямоугольников относительно нанесенной на экран телевизора 9 разметки.
Подъем и опускание груза отображается на плоскость экрана перемещением прямоугольника - «Тени относительно изображения груза. При имитации подъема прямоугольник - «Тень (поз. 1 фиг. 2) удаляется, а при опускании - приближается к изображению груза (поз. 2 фиг. 2), качающемуся относительно изображения тележки (поз. 3 фиг. 2). Во избежании путаницы элементы изображения имеют разный цвет. Например: тележка - синяя, груз - красный, «Тень - зеленая.
Координаты изображения «Тени Хт A r-(-Zi и Утн У1-|-7г вычисляются пятым 21 и щестым 22 сумматорами.
Имитатор работает следующим образом.
Первый счетчик 23 пересчитывает импульсы высокочастотного генератора 24, а второй счетчик 25 - импульсы строчных синхрои.мпульсов, поступающих с входа 10.
Поскольку первый счетчик 23 синхронизирован через установочный вход строчным, а второй счетчик 25 - кадровыми синхроимпульсами, кодовые комбинации на их выходах можно рассматривать клк координаты электронного луча на экране телевизионного приемника 9.
По заднему фронту кадрового синхроимпульса, поступающего на синхронизирующие входы первого 16 и второго 18 регистров БМДД 4-8, в них производятся следующие вычисления. Код с выхода ПЗУ 14, численно равный приращению первой производной за период кадровь1х синхроимпульсов, складывается первым сумматором 15 со значением самой производной и заносится в первый регистр 16. Аналогично во втором регистре устанавливается новое значение фазовой координаты.
Очевидно, что этот процесс аналогичен применению явного метода Эйлера первого порядка:
Хп Xn-t At, где At - щаг интегрирования. На первых входах схем сравнения 26-
31 появляются коды, соответствующие координатам Хт,н,Хг, Хтн, Утн. Эти координаты сравниваются с координатами электронного луча (кодами на выходах первого 23 и второго 25 счетчиков) и при их совпадении соответствующие схемы сравнения включают одновибраторы 32-37, время импульса на выходах которых определяют геометрические размеры пря.моугольников, отображающих элементы крана.
При одновременном совпадении координат Х и ii, , г и Уг, Хтн и Утн (одновременном появлении импульса на выходе одно- вибраторов 32 и 35, 33 и 36, 34 и 37) соответствующие схемы И (38, 39 или 40) 0 подадут сигнал на модулятор блока 9 индикации, включив тем самым электронный луч (красный, синий или зеленый).
Применение предлагаемого устройства позволяет отказаться от приобретения специальных тренажеров для подготовки операторов различных объектов, а использовать для тренажа одно устройство, меняя лищь программы вычислений.
5
Формула изобретения
второй, третий и четвертый сумматоры, выход первого блока моделирования динамики движения соединен с первым входом первого сумматора и с информационным входом второго блока моделирования динамики движения, выход которого соединен
с вторым входом первого сумматора, первый выход которого соединен с первым входом второго сумматора, второй вход которого соединен с первым входом третьего сумматора и выходом третьего блока моделирования динамики движения, информационный вход которого соединен с первым выходом пульта управления, второй выход которого соединен с информационным входом первого блока моделирования динамики движения, а третий выход соединен с
информационным входом четвертого блока моделирования динамики движения, выход которого соединен с первым входом четвертого сумматора и с информационным входом пятого блока моделирования динамики движения, выход которого соединен с
вторым входом четвертого сумматора, первый выход которого соединен с вторым входом третьего сумматора, отличающийся тем, что, с целью расширения дидакти
ческих возможностей имитатора, в него введены первый и второй счетчики, первый, йторой, третий, четвертый, пятый и шестой блоки сравнения, первый, второй, третий, четвертый, пятый и шестой одно- вибраторы, первый, второй и третий элементы И, выход первого элемента соединен с первым информационным входом блока индикации, первый синхронизирую- |1ций вход которого соединен с R-входом первого счетчика, С-входом второго счетчи- ;ка и является входом кадровых синхро- j импульсов, второй синхронизирующий вход соединен с R-входом второго счетчика, управляющими входами первого, второго, третьего, четвертого, пятого и шестого блоков моделирования динамики движения и является входом строчных синхроимпульсов, второй информационный вход соеди- iieti с выходом второго элемента И, а третий информационный вход соединен с выходом третьего элемента И, первый вход первого ;элемента И соединен с выходом первого : одно 5ибратора, вход которого соединен с iвыходом первого блока сравнения, первый : вход которого соединен с вторым выходом nepsioro сумматора, а второй вход соединен с выходом первого счетчика, с первым входом второго блока сравнения, ;второй вход которого соединен с выходом ; второго сумматора, а выход соединен с входом второго одновибратора, выход которого i соединен с первым входом второго элемента И, первый вход третьего элемента : И соединен с выходом третьего одновибра- iTOpa, вход которого соединен с выходом ;третьего блока сравнения, первый вход кото- iporo соединен с выходом четвертого сумматора, а второй вход соединен с выходом первого счетчика, первый вход четвертого блока сравнения соединен с выходом треть0
5
его сумматора, второй вход соединен с выходом второго счетчика, а выход соединен с входом четвертого одновибратора, выход которого соединен с вторым входом первого элемента И, второй вход второго элемента И соединен с выходом пятого одновибратора, вход которого соединен с выходом пятого блока сравнения, первый вход которого соединен с выходом первого блока моделирования, а второй вход соединен с выходом второго счетчика, первый вход щестого блока сравнения соединен с выходом четвертого блока моделирования динамики движения, второй вход соединен с выходом второго счетчика, а выход соединен с входом шестого одно- вибратора, выход которого соединен с вторым входом третьего элемента И, выход высокочастотного генератора соединен с С-входом первого счетчика.
0 тем, что каждый из пяти блоков моделирования динамики движения содержит блок памяти, первый и второй сумматоры, первый и второй регистры, информационный вход блока памяти является информационным входом блока моделирования динамики движения, а выход соединен с первым входом первого сумматора, выход которого соединен с информационным входом первого регистра, выход которого соединен с входом считывания блока памяти, вторым
0 входом первого сумматора и первым входом второго сумматора, выход которого соединен с информационным входо1М второго регистра, вход записи которого соединен с входом записи первого регистра и является управляющим входом блока модели5 рования динамики движения, а выход является выходом блока моделирования динамики движения.
5
| Устройство для обучения крановщика навыкам по управлению краном | 1972 |
|
SU437122A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
