ГЛГЭ
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Целью изобретения является повы- шенив быстродействия и улучшение энергетических показателей.
На чертеже приведена схема электропривода.
I Электропривод постоянного тока содержит электродвигатель 1, подключенный к преобразователю 2, последовательно соединенные первый блок 3 срав сравнения, регулятор 4 частоты вращения, второй блок 5 сравнения и регу- лятор 6 тока, выход которого подключен к входу преобразователя 2, последовательно соединенные датчик 7 стотн вращения и фильтр 8, выход которого подключен к входу первого блока 3 сравнения, последовательно сое-, диненные датчик 9 тока и усилитель 10, выход которого, подключен к входу второго блока 5 сравнения, корректи- руюп(ая модель 1 1, выход которой сое- динен с входом первого блока 3 сравнения. Вход корректирующей модели подключен к выходу второго блока 5 сравнения, причем корректирующая модель 11 и регулятор тока выполнены с пере- даточными функциями
.TUL
Тг()(
,Vr
(v, т« , к
-)де Т, я - громеханическая и
электромагнитная посто- дО янные времени; Р - оператор Лапласа;
Т,у - мал.ая некомпенсирующая постоянная времени;
T(j - постоянная времени 45 фильтра;
RQ полное активное сопротивление якорной цепи;
К„ - коэффициент передачи
преобразователя; ел
К - коэффициент усиления контура тока;
К - коэффициент усиления . контура частоты Bpaifle. -ния;55
С - конструктивная постоянная электродвигателя. Электропривод работает следуюнщм бразом.
j
Ю-.15 2025 30
35
дО
45
ел
55
Входной сигнал подается на неинвертирующий вход первого блока 3 сравнения, с выхода которого через последовательно соединенные регулятор 4 частоты вращения, второй блок 5 сравнения, регулятор 6 тока поступает на силовой преобразователь 2. Управление частотой вращения электродвигателя 1 осуществляется изменением напряжения силового преобразователя 2 при помощи отрицательных обратных связей по току и по частоте вращения, снимаемых с датчика 9 тока и тахогенератора 7 и подаваемых через усилитель 10 токового сигнала и фильтр 8 на входы регуляторов 6 и 4 тока и частоты вращения. Входной сигнал регулятора 6 тока через кор- ректирзлощую модель 1 I поступает на вход регулятора 4 частоты вращения, при этом (Суммарный сигнал обратных связей на входе регулятора 4 частоты вращения эквивалентен сигналу, уменьшенному на скорректированную динамическую ошибку контура тока. При этом передаточная функция замкнутой системы имеет вид произведез-шя апериодического звена на замкнутую передаточную- функцию контура тока.
Принимая коэффициент усиления регулятора 3 частоты вращения максимально допустимым, получаем динамические показатели двухконтурной системы подчиненного регулирования близкими к та- таковым.для контура тока.
Формула изобретения
Управляемый электропривод постоянного тока, содержащий эле стродвига- тель, подключенный к преобразователю, последовательно соединенные первый блок сравнения, регулятор частоты вращения, второй блок сравнения и регулятор тока, выход которого.подключен к входу преобразователя, последовательно соединенные датчик частоты вращения и фильтр, выход которого подключен к входу-первого блока сравнения, датчик тока, выход которого подключен к входу второго блока сравнения, корректирующая модель выход которой соединен с входом первого блока сравнения, о тличаю- щ и и с я тем, что, с целью повышения быстродействия и улучшения;энергетических показателей, вход «оррек- тирующей модели подключен к выходу
второго блока сравнения, причем корректирующая модель и регулятор тока имеют следующие передаточные функции:
т1
и гр-) - 9 fj . w км K,CT«pU T(Vp+l)
V(5-K;K;fe: (T.T.bi.ij.),
Тдц, Т« - электромеханическая и
электромагнитная постоянные времени;
Р - оператор Лапласа; Т, - постоянная времени регулятора тока;
:
Т - малая некомпенсируемая постоянная времени;
- постоянная времени фильтра высокой частоты}
R. - полное активное сопротивление якорной цепи;
С - конструктивная постоянная двигателя;
К„ -коэффициент усиления силового преобразователя;
К, - коэффициент усилеиия контура тока;
К - коэффициент усиления контура частоты вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый электропривод постоянного тока | 1989 |
|
SU1700731A1 |
| Электропривод постоянного тока | 1989 |
|
SU1661954A1 |
| ПОЗИЦИОННЫЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2401501C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С ИДЕАЛЬНЫМ ВАЛОПРОВОДОМ | 2008 |
|
RU2370878C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ ИДЕАЛЬНОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2455749C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является повьшение быстродействия и улучшение энергетических показателей. Устройство содержит корректирующую модель 11, выход которой подключен к входу первого блока 3 сравнения. Вход корректирующей модели 11 подключен к входу регулятора 6 тока. Устройство позволяет поддерживать заданный статизм системь за счет устранения динамической ошибки контура тока. 1 ил.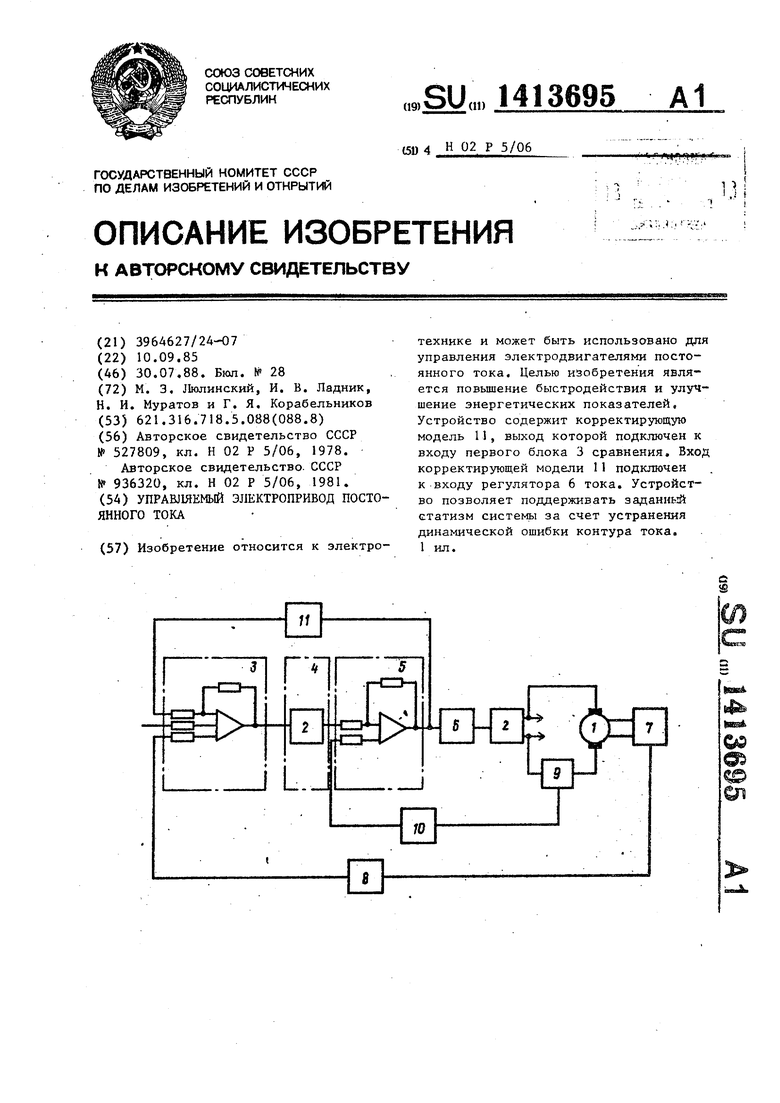
| Система подчиненного регулирования параметров электропривода | 1975 |
|
SU527809A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство | |||
| Устройство для управления электроприводом постоянного тока | 1980 |
|
SU936320A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
