Изобретение относится к области электротехники, а именно к системам автоматического управления электроприводами постоянного тока, в которых производится регулирование частоты вращения с использование тахогенератора, и наиболее эффективно может быть использовано в замкнутых системах автоматизированного электропривода с высоким требованиями к частоте вращения.
Цель изобретения - упрощение электропривода.
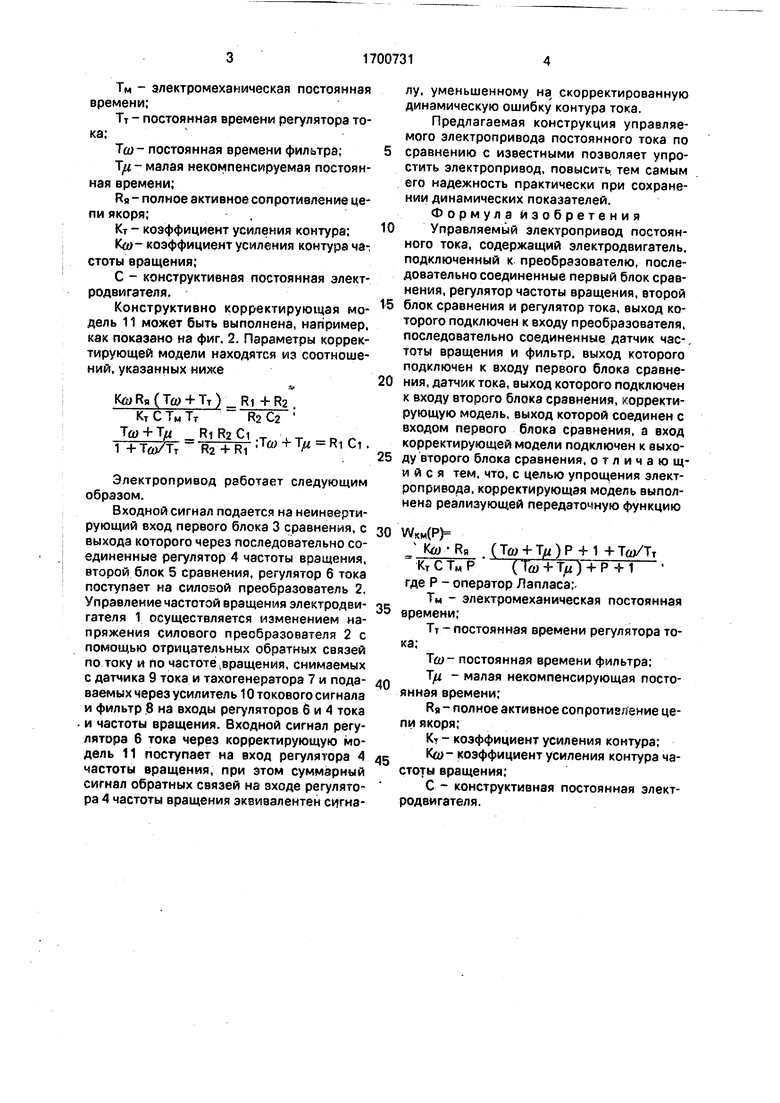
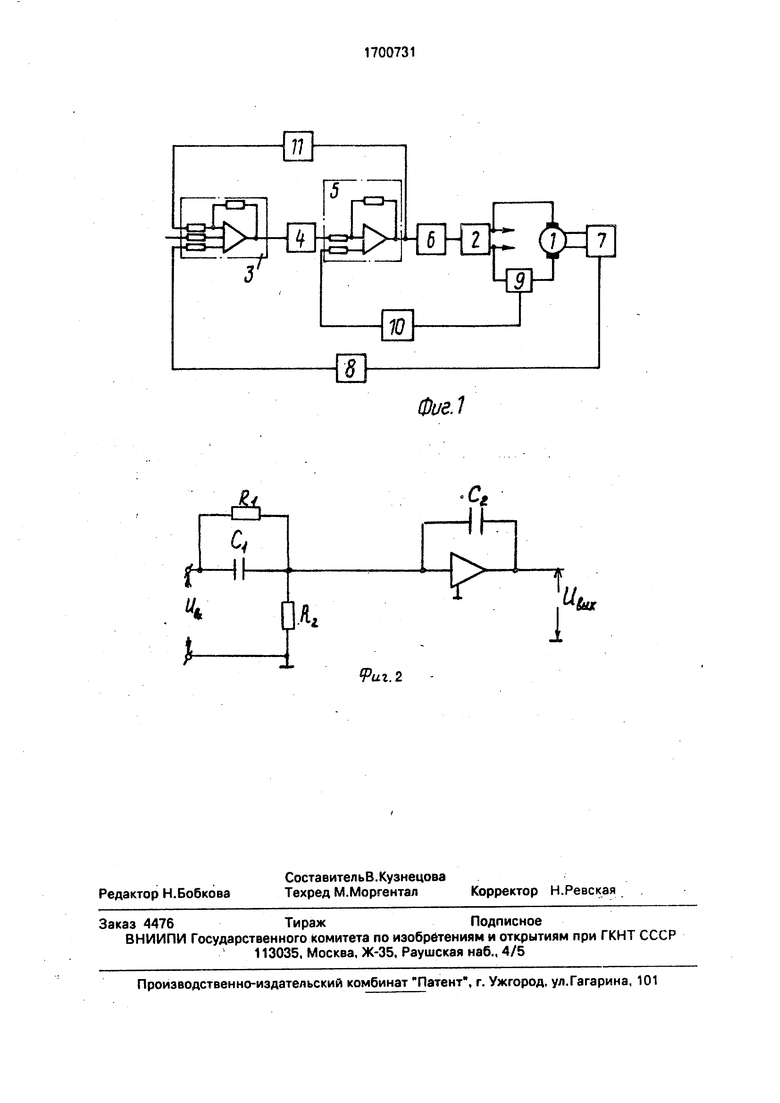
На фиг. 1 показана функциональная cxe-J ма электропривода; на фиг. 2 - принципиальная схема корректирующей модели.
Управляемый электропривод постоянного тока содержит электродвигатель 1, подключенный к преобразователю 2, последовательно соединенные первый блок 3
сравнения, регулятор 4 частоты вращения, второй блок 5 сравнения и регулятор 6 тока, выход которого подключен к входу преобразователя 2, последовательно соединенные датчик 7 частоты вращения (тахогенератор) и фильтр 8, выход которого подключен к входу блока 3 сравнения, датчик 9 тока, выход которого через усилитель 10 подключен к входу блока 5 сравнения, и корректирующую модель 11. вход которой соединен с выходом блока 5 сравнения, а выход - с входом блока 3 сравнения, при этом корректирующая модель выполнена реализующей передаточную функцию ЛМР) Ря ()P +1 +Тщ/Тт
Кт С Тм Р (Tfi/+fy) + P+1 где Р - оператор Лапласа;
Ч
ы
Тм - электромеханическая постоянная времени;
Тт - постоянная времени регулятора тока;
Та)- постоянная времени фильтра;
Т/л - малая некомпенсируемая постоянная времени;
Ra - полное активное сопротивление цепи якоря;
Кт - коэффициент усиления контура;
Ко)- коэффициент усиления контура чаг стоты вращения;
С - конструктивная постоянная электродвигателя.
Конструктивно корректирующая модель 11 может быть выполнена, например, как показано на фиг. 2. Параметры корректирующей модели находятся из соотношений, указанных ниже
v
toRsCT + TQ Ri-r-Rz КтСТмТтRaC2
+ Тм Ri R2 Ci - .... , „ TTTS%e TR :Te + 1 mRltClЭлектропривод работает следующим образом.
Входной сигнал подается на неинвертирующий вход первого блока 3 сравнения, с выхода которого через последовательно соединенные регулятор 4 частоты вращения, второй блок 5 сравнения, регулятор 6 тока поступает на силовой преобразователь 2. Управление частотой вращения электродвигателя 1 осуществляется изменением напряжения силового преобразователя 2 с помощью отрицательных обратных связей по току и по частоте,вращения, снимаемых с датчика 9 тока и тахогенератора 7 и подаваемых через усилитель 10 токового сигнала и фильтр 8 на входы регуляторов 6 и 4 тока . и частоты вращения. Входной сигнал регулятора 6 тока через корректирующую модель 11 поступает на вход регулятора 4 частоты вращения, при этом суммарный сигнал обратных связей на зходе регулятора 4 частоты вращения эквивалентен сигналу, уменьшенному на скорректированную динамическую ошибку контура тока.
Предлагаемая конструкция управляемого электропривода постоянного тока по
сравнению с известными позволяет упростить электропривод, повысить тем самым его надежность практически при сохранении динамических показателей. Формула изобретения
Управляемый электропривод постоянного тока, содержащий электродвигатель, подключенный к преобразователю, последовательно соединенные первый блок сравнения, регулятор частоты вращения, второй
блок сравнения и регулятор тока, выход которого подключен к входу преобразователя, последовательно соединенные датчик час-, тоты вращения и фильтр, выход которого подключен к входу первого блока сравнения, датчик тока, выход которого подключен к входу второго блока сравнения, корректирующую модель, выход которой соединен с входом первого блока сравнения, а вход корректирующей модели подключен к выходу второго блока сравнения, отличающийся тем, что, с целью упрощения электропривода, корректирующая модель выполнена реализующей передаточную функцию
WKM(P
4 KQJ-R, (TcQJ-T/QP + 1 -ЬТо/Тт Кт С Т„ Р (Т + Т/«) + Р Ч-1 где Р - оператор Лапласа;Тм - электромеханическая постоянная времени;
Тт - постоянная времени регулятора тока;
постоянная времени фильтра;
Ju - малая некомпенсирующая посто
янная времени;
Ря полное активное сопротивление цепи якоря;
Кт - коэффициент усиления контура; Ко)- коэффициент усиления контура ча
стоты вращения;
С - конструктивная постоянная электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1989 |
|
SU1661954A1 |
| Управляемый электропривод постоянного тока | 1985 |
|
SU1413695A1 |
| Электропривод | 1982 |
|
SU1083318A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод постоянного тока | 1987 |
|
SU1628173A1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
Изобретение относится к электротехнике и может быть использовано в системах автоматического управления электродвигателей. Цель изобретения - упрощение электропривода. Электропривод постоянного тока содержит электродвигатель 1, подключенный к преобразователю 2, последовательно соединенные первый бпок 3 сравнения, регулятор 4 частоты вращения, второй блок 5 сравнения и регулятор 6 тока. Последовательно соединенные датчик 7 частоты вращения и фильтр 8, выход которого подключен к входу первого блока 3 сравнения. Последовательно соединенные датчик 9 тока и усилитель 10, выход которого подключен к входу второго блока 5 сравнения. Выход корректирующий модели 11 соединен с входом первого блока 3 сравнения. Вход корректирующей модели подключен к выходу второго блока 5 сравнения. В дан ном электроприводе сигнал обратных связей на входе регулятора 4 частоты вращенич корректируется с учетом динамической ошибки контура тока. 2 ил.
/«
А,
Фиг.1
т
ь
и.
Sax
Фиг.г
| Лебедев Е.Д | |||
| и др | |||
| Управление вентильными электроприводами постоянного тока | |||
| - М.: Энергия, 1970, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Управляемый электропривод постоянного тока | 1985 |
|
SU1413695A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
