Изобретение относится к электротех нике, а именно к системам автоматичес кого управления электроприводами постоянного тока, в которых производится регулирование частоты вращения с использованием тахогенераторов. Изобретение может найти применение в системах управления электроприводами вспомогательных механизмов обжимных прокатных станов в металлургической промышленности, а также в система управления другими электроприводами, предъявляющими высокие требования к точности регулирования частоты вращения и к динамическим показателям. Известно устройство, содержащее последовательно соединенные усилитель мощности и регулятор скорости, второй вход которого соединен с тахогене ратором р . Недостатком устройства является то, что выходное напряжение тахогенератора содержит переменные составляющие, которые вызывают колебания токга якоря электродвигателя, приводят к дополнительным потерям энергии, ухудшают коммутацию и увеличивают динамические нагрузки на механизм. Наиболее близким к предлагаемому по технической сущности является устройство, содержащее последовательно соединенные усилитель мощности, регуляторы тока и скорости электродвигателя, вторые входы усилителя мощности и регулятора тока соединены соответственно с датчиком тока, а второй вход регулятора скорости через фильтр с тахогенератором 2. Наличие фильтра в цепи обратной связи по скорости для устранения влияния пульсаций тахогенератора, приводит к ухудшению динамических свойств системы регулирования скорости вращения - увеличению перерегулирования по току или времени регулирования. Такое ухудшение недопустимо для механизмов, работающих в напряженных режимах. Поэтому при настройке систем управления с тахогенераторами идут на компромиссный вариант, устанавливая фильтры с небольшими постоянными времени, которые не позволяют полностью устранить влияние поступающих с выхода тахогенератора помех на ток якоря двигателя.
Цель изобретения - повышение помехозащищенности и быстродействия устройства.
Указанная цель достигается тем, что в устройство введены последовательно соединенные корректирующее звено и датчик динамического тока электродвигателя, причем выход корректирующего звена соединен с третьим входом регулятора скорости, а вход датчика динамического тока подключен к усилителю мощности.
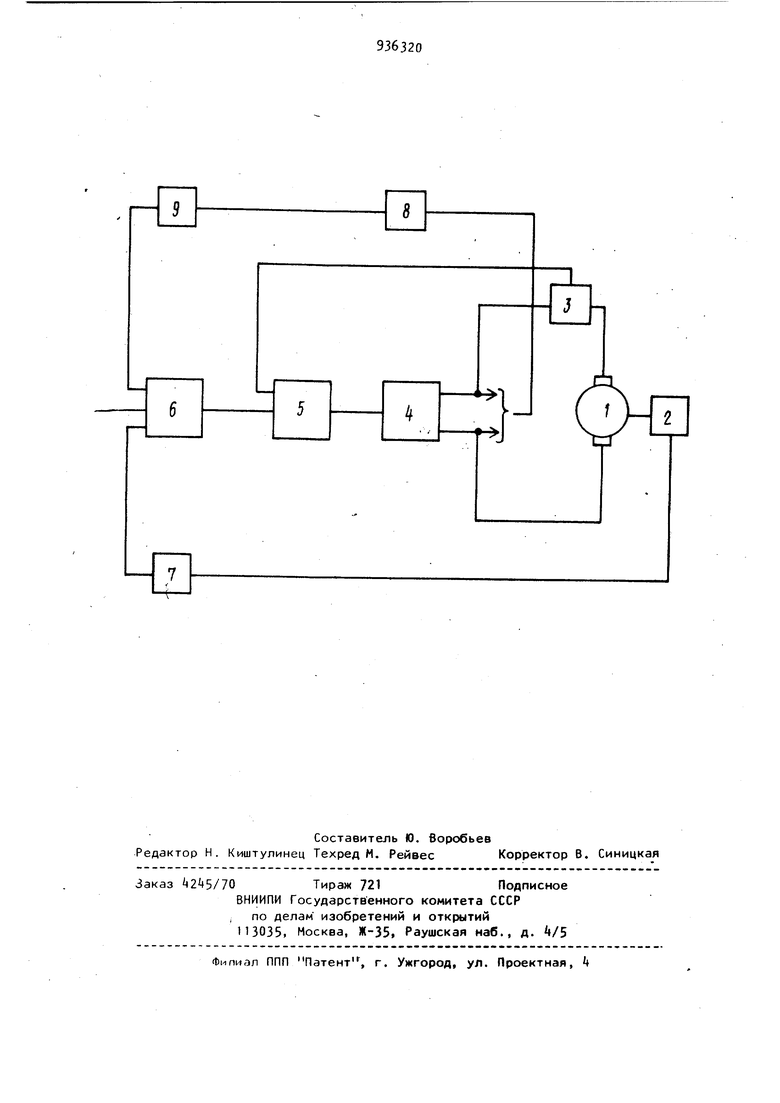
На чертеже приведена структурная схема предлагаемого устройства.
Электродвигатель 1, кинематически связанный с тахогенератором 2, подключен через датчик тока 3 к выходу управляемого усилителя мощности k. Вход усилителя мощности подключен к выходу регулятора тока 5 первый вход которого подключен к выходу регулятора скорости 6., а второй вход подключен к выходу датчика тока 3. Второй вход регулятора скорости 6 через фильтр 7 подключен к выходу тахогонератора 2. Вход датчика динамического тока 8 подключен к выход усилителя мощности k, а выход через корректирующее звено 9 подключен к i третьему дополнительному входу регулятора скорости 6.
Принцип действия управляемого электропривода заключается в следующем.
Управление частотой вращения элек родвигателя 1 осуществляется изменением напряжения выхода усилителя мощности Ц. Управление выходным напряжением усилителя мощности 4 производится регулятором тока 5, регулятором скорости 6 с помощью отрицательных обратных связей: связи по току электродвигателя 1 , снимаемой с датчика тока 3 и по скорости электродвигателя 1, снимаемой с тахогенератора 2 и подаваемой на вход регулятора скорости 6 через фильтр 7. Датчик динамического тока 8 формирует на основании изменения выходного напряжения усилителя мощности 4 сигнал, пропорциональным динамической составляющей тока электродвигателя 1. Сигнал с
выхода датчика динамического тока 8 через корректирующее звено 9, представляющее собой фильтр с постоянной времени, равной постоянной времени фильтра 7, поступает на вход регулятора скорости 6. При этом суммарный сигнал обратных связей на входе регулятора скорости эквивалентен сигналу безынерционной обратной связи по скорости
Таким образом, данная система, сохраняя фильтрующие свойства, работает как система с безынерционной обратной связью по скороо(|1, что повышает динамические показатели. Кроме того, устройство позволя,ет устанавливать фильтры с любыми требуемыми для подавления пульсаций выходного напряжения тахогенератора постоянными времени без ухудшения динамических показателей.. Зто обеспечивает повышение уровня помехозащищенностисистемы электропривода, улучшение коммутации, уменьшение дополнительных потерь энергии, уменьшение дополнительных нагрузок на механизм и повышение быстродействия.
Формула изобретения
Устройство для управления электроприводом постоянного тока, содержащее последовательно соединенные усилитель мощности, регуляторы тока и скорости электродвигателя, вторые входы усилителя мощности и регулятора соединены соответственно с датчиком тока, а второй вход регулятора скорости через фильтр - с тахогенератором, отличающийся тем, что, с целью повышения помехозащищенности и быстродействия, в него введены последовательно соединенные корректирующее звено и датчик динамического тока электродвигателя, причем выход корректирующего звена соединен с третьим входом регулятора скорости, а вход датчика динамического тока подключен к усилителю мощности.
Источники информации, принятые во внимание при экспертизе
1.Лебедев Е. Д. и др. Управление вентильными электроприводами постоянного тока. М., Энергиа, 1970, с. 5
2.Патент США № , кл. Н 02 Р 3/04. 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1989 |
|
SU1661954A1 |
| Электропривод | 1982 |
|
SU1083318A1 |
| Электропривод постоянного тока | 1977 |
|
SU681528A1 |
| Самонастраивающаяся робастная система управления | 2023 |
|
RU2819264C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| Электропривод постоянного тока | 1976 |
|
SU661704A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| Управляемый электропривод постоянного тока | 1989 |
|
SU1700731A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| Управляемый электропривод постоянного тока | 1985 |
|
SU1413695A1 |